
3D Game Programming withDX11 學習筆記(一) 數學知識總結
在圖形學中,數學是不可或缺的一部分,所以本書最開始的部分就是數學知識的復習。在圖形學中,最常用的是矢量和矩陣,所以我根據前面三個章節的數學知識,總結一下數學知識。
一、矢量
數學中的矢量,擁有方向和長度。其實矢量和點在坐標系中的表示完全一致(笛卡爾坐標系為準),區分矢量和點的關鍵,我覺得就是做平移。點是不能用平移操作來保證一致的,比如點A(1,2,3)經過平移矢量(1,2,3)後就是B(2,4,6),此時就是一個新的點。但是矢量經過相同平移操作後,還是矢量(1,2,3),這是因為矢量表示的是 vector head相對於 vector tail的偏移,平移操作並不會改變這種偏移。
在矢量中一個關鍵就是坐標系,數學中的坐標系主要分為左手坐標系和右手坐標系。我時不時會弄混左手和右手坐標系,後來做了一個快捷的記憶:我的頭是y方向,右手伸出來是x方向,那麽如果z方向向前是正方向,那我就處於左手坐標系; 如果我的z方向向後是正方向,那我就處於右手坐標系。所以看起來我的臉決定了我的坐標系:)
矢量的數學操作主要是:加、減、乘三種操作,如果算上求模(求長度),那就是四種操作。A=(xa,ya,za), B=(xb,yb,zb)
加:A + B = (xa+xb, ya+yb, za+zb)
減:A - B = (xa-xb, ya-yb, za-zb)
乘:A *B = xaxb+yayb+zazb
模:||A||2= xa2 + ya2+za2
細心的會發現矢量乘的結果變成了一個數,確實,最終的結果就是一個數,其本質就是一種映射或者投影,表示的是A矢量在B矢量方向上的投影長度,矢量的乘可以用公式表示為:
A *B = ||A|| *||B|| * sinθ,其中θ為兩個矢量的夾角(由於不熟悉博客的數學公式添加,只有先這寫著了,後面熟練了再修改吧)
矢量中最常見的操作就是歸一化,比如有一個矢量的序列{V0,v1,V2...},如何將這些矢量歸一化為互相垂直的單位矢量?
這兒引入投影的一個表示:projn(V)= v . n/||n||, 表示的是v在n的單位矢量上的投影,那麽對於矢量序列,我們可以這樣進行正交歸一化:
1)v0, v1,v2.......
2) w0 = v0;
3) w1 = v1 - projw0(v1)
4) w2 = v2 - projw0(v2) - projw1(v2)
........
根據上面的規律,可以得到正交化的規律:將當前矢量(第一個除外)去除在前面所有矢量上的分量(投影),得到的就是與前面各個適量正交的矢量。
最後我們將正交化的矢量進行歸一化操作,即可得到一組正交歸一化矢量序列。
矢量的最後一個知識點是:矢量的叉積,與矢量點積得到一個投影的結果值不同,矢量的叉積得到的是一個矢量,基本公式為:
AXB = (yazb -zayb, zaxb - xazb, xayb - yaxb),
單看公式看不出規律,不過可以這樣理解:xyz, yzx, zxy,分別去掉x, y , z,最後的結果就是三個分量的第一項,然後交換得到三個分量需要減去的第二項
矢量的叉積的實際意義,就是求得一個和A/B兩個矢量都垂直的矢量,這在圖形學中,可以用來求解遊戲對象的一些常用矢量, 比如上(up)/下(down)/左(left)/右(right)/前(forward)/後(back)這些矢量都是互相垂直的,可以利用矢量的叉積得到。註意在笛卡爾坐標系中,矢量的叉積都是左手定律決定方向的,所以AXB和BXA是剛好方向相反的兩個等長矢量。
二、矩陣
在圖形學中,我們會繪制各種各樣的遊戲實例,這些實例都是用基本的點(verts)和相關的貼圖(textures)、材質(material)等共同設置渲染狀態的。對於基本的頂點,常常需要做的一個基本操作就是變換:平移、旋轉、縮放等。這些變換操作對應的就是矩陣的變換。
矩陣的定義就不再多說,就是一個nxm的同類元素的集合,通常這個元素就是數字(也可以為其他,這兒不再擴展)。
矩陣最基本的操作可以分為: 矩陣的乘, 矩陣的轉置, 矩陣的行列式, 矩陣的逆
矩陣的乘積: C = AB ≠BA
C矩陣中的每個元素是Cij是A矩陣的i行和B矩陣j列的對應點積的結果,基於此可以得到A矩陣的列數和B矩陣的行數是相等的(不然怎麽做點積....)
矩陣的轉置AT,就是將矩陣的行和列對換,說的簡單點就是一列一列的變,新的每列是以前矩陣的每行豎著排列(感覺就是重新排隊)
矩陣的行列式,是一個比較重要的點,Aij作為行列式的代指,就是去除A矩陣的i行和j列後得到的行列式計算結果,整體的公式為:
detA = ∑j=1n A1j(-1)i+jdetA1j
可以看出矩陣的行列式計算就是一個遞歸的計算過程,一般在圖形學中的計算不會超過4x4的維度,所以可以用筆算的方式來計算這些矩陣的行列式:)
基於行列式,可以得到一個新的矩陣: 鄰接矩陣A*,基於基本的矩陣A可以得到一個新的矩陣CA,其中的元素Cij = (-1)i+jdetAij,則可以定義鄰接矩陣為:
A* = CAT 基於鄰接矩陣,我們可以得到矩陣A的逆矩陣A-1 :A-1 = A*/detA
三、變換矩陣
基於矩陣的定義,我們可以將圖形學中的一些常見的變換轉化為對應的變換矩陣,這樣在對點或者矢量進行變換的時候,其對應的數學操作就是一個變換矩陣的操作。基本的變換矩陣可以分為:縮放矩陣, 平移矩陣,旋轉矩陣。
對於變換矩陣對矢量的作用,可以這樣理解:u =(x,y,z) = xi + yj + zk, 那麽一個變換操作可以表示為τ(u) = τ(xi + yj + zk) = xτ(i) + yτ(j) + zτ(k) = [x y z] [τ(i) τ(j) τ(k)]T = uA
所以說的直白點,就是用矩陣A來表示一種變換操作。那麽具體如何表示呢?可以分拆為基本矩陣,然後進行合並即可。
1、縮放矩陣S
拆開用行向量表示為S(i) = (sx .1, sy.0, sz.0), S(j) = (sx .0, sy.1, sz.0),S(k) = (sx .0, sy.0, sz.1)
則縮放矩陣可以表示為S = [si , sj, sk]T, si = (sx,0,0), sj = (0,sy,0), sk = (0,0,sz)
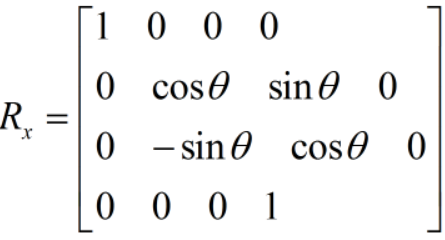
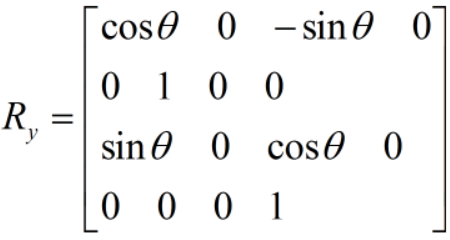
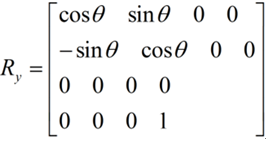
2、旋轉矩陣R
其實旋轉矩陣是三個矩陣中相對比較難的矩陣,這兒給出一個旋轉公式:
Rn(V) = projn(v) + Rn(V⊥)
= (n v) n + cosθ V⊥ + sinθ (n x v)
= cosθ V + (1 - cosθ)(n v)n + sinθ(n x v)
具體的常用的三個旋轉矩陣可以列出來:
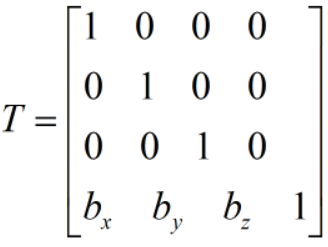
3、平移矩陣T
平移矩陣比較簡單,就不做推算,直接給出結果即可:
綜合三種基本矩陣,我們可以進行組合得到一個較為復雜的變換矩陣。不過在圖形學的計算中,對於三種矩陣的排序有一定的講究,一般先用縮放矩陣S對當前的變換對象進行縮放,然後用旋轉矩陣R進行旋轉操作,最後用平移矩陣T進行平移操作,所以可以歸並為SRT矩陣。
總結:經過基本的矢量,矩陣和變換的數學知識總結後,接下來就要進入正式的圖形學知識了,我會在後面持續更新~
3D Game Programming withDX11 學習筆記(一) 數學知識總結