
深度優先和廣度優先的基礎應用
阿新 • • 發佈:2017-06-08
logs node con min fan step 分享 lin 判斷
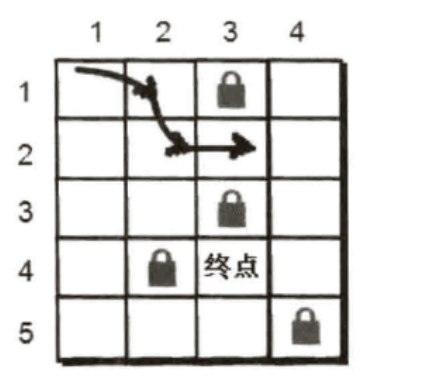
圖來自啊哈算法
這裏描述的問題就是如何從1,1走到4,3
這裏有兩個解決方案,一個是用深度優先算法
初始化地圖,和標記點
int[,] ditu = new int[5, 4]{ {0,0,1,0}, {0,0,0,0}, {0,0,1,0}, {0,1,0,0}, {0,0,0,1} }; int[,] book_1 = new int[5, 4];
定義每次走的方向
int[,] fanxiang = new int[4, 2] { {0,1},//右邊 {1,0},//下邊 {0,-1},//左邊 {-1,0}//上邊 };
private void dyzdlj(int x, int y, int step) { if (x == 3 && y == 2) { if (step < min) { min= step; } Console.WriteLine("我找到了一種走的方法了,一共走了{0}步", step); return; } for (int i = 0; i < 4; i++) { //走 int tx = x + fanxiang[i, 0]; int ty = y + fanxiang[i, 1];//判斷是否越界 if (tx < 0 || ty < 0 || tx > 4 || ty > 3) { continue; } if (book_1[tx, ty] == 0 && ditu[tx, ty] == 0) { book_1[tx, ty] = 1; dyzdlj(tx, ty, step + 1); book_1[tx, ty] = 0; } } }

2.廣度搜索,所謂的廣度搜索呢,就是每次把能走的全部走光
定義基本的結構,用來保存數據
public struct node { public int x;//x坐標 public int y;//y坐標 public int s;//步數 }
具體實現
private void gdyxsf() { node[] nn = new node[20]; int head = 0, tail = 0; //設置起點 nn[head].x = 0; nn[head].y = 0; nn[head].s = 0; book_1[0, 0] = 1; tail++; int flag = 0; while (head<tail) { for (int i = 0; i < 4; i++) { int tx =nn[head].x+fanxiang[i, 0]; int ty = nn[head].y + fanxiang[i, 1]; if (tx<0||ty<0||tx>4||ty>3) { continue; } //判斷地圖是否被走過 if (ditu[tx,ty]==0&&book_1[tx,ty]==0) { book_1[tx, ty] = 1; nn[tail].x = tx; nn[tail].y = ty; nn[tail].s = nn[head].s + 1; tail++; } if (book_1[3,2]==1) { flag = 1; break; } } if (flag==1) { Console.WriteLine("我已經到了這個地方了,我一共走了{0}步", nn[tail - 1].s); break; } head++; } }
執行結果

深度優先和廣度優先的基礎應用