
ABB-robotstudio離線編程-Smart組件資料-筆記
阿新 • • 發佈:2017-09-16
ani ech com 狀態 附加 一個 per 限制 括號
7.VectorConverter
Smart組件
目錄:
1.“信號與屬性”子組件。
2.“參數與建模”子組件。
3.“傳感器”子組件。
4.“動作”子組件。
5.“本體”子組件。
6.“其他”子組件。
一、“信號與屬牲”子組件
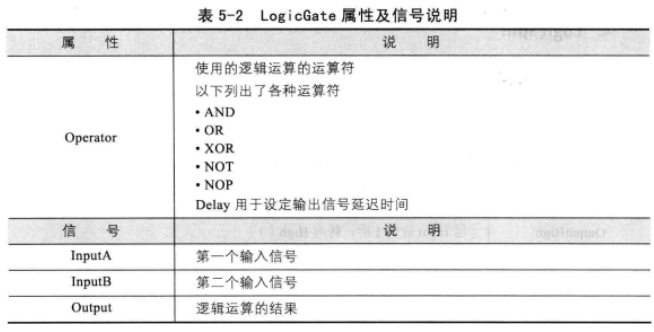
1.LogicGate
Output信號由InputA和InputB這兩個信號的Operator中指定的邏輯運算設置,延遲在Delay中指定。
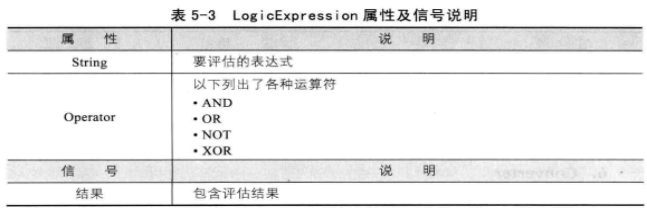
2.LogicExpression
評估邏輯表達式。
3.LogicMux
依照 Output=( Input A * NOT Selector ) + ( Input B * Selector )設定 Output。

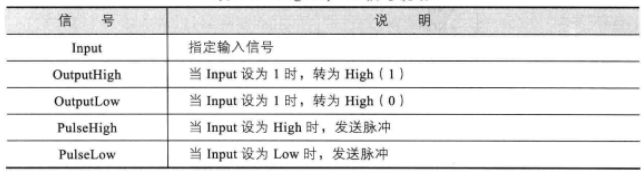
4.LogicSplit
LogicSplit 獲得 Input 並將 OutputHigh 設為與 Input 相同,將 OutputLow 設為與Input相反。Input設為High時,PulseHigh發出脈沖;Input設為Low 時,PulseLow發出脈沖。
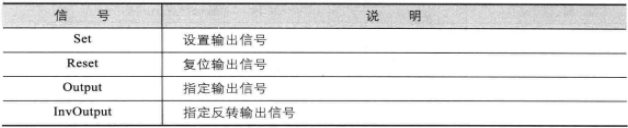
5.LogicSRLatch
用於置位/復位信號,並帶鎖定功能。
6. Converter
在屬性值和信號值之間轉換。

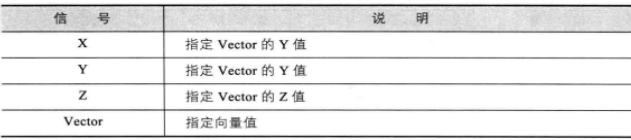
7.VectorConverter
在Vector和X、Y、Z值之間轉換。
8.Expression
表達式包括數字字符(包括PI),圓括號,數學運算符s、+、-、*、/、 A (冪)和數學函數sin、cos、sqrt、atan、abs。任何其他字符串被視作變量, 作為添加的附加信息。結果將顯示在Result框中。

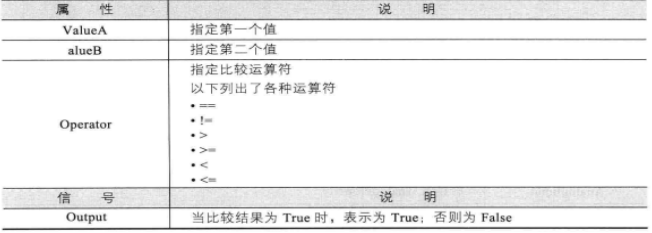
9.Comparer
Comparer使用Operator對第一個值和第二個值進行比較。當滿足條件時, 將Output設為1。
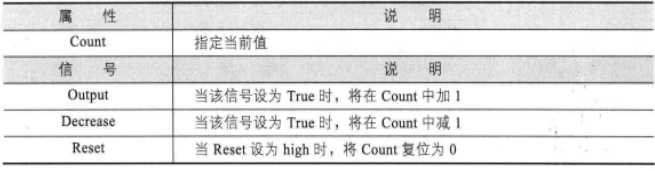
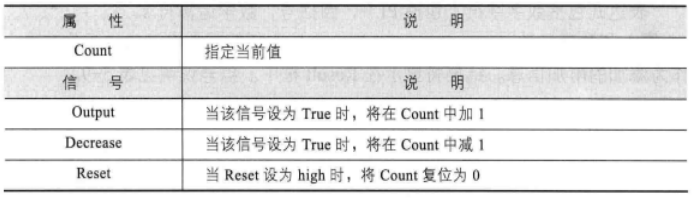
10. Counter
設置輸入信號Increase時,Count增加;設置輸入信號Decrease時,Count 減少;設置輸入信號Reset時,Count被重置。
11.Repeater
脈沖Output信號的Count次數。
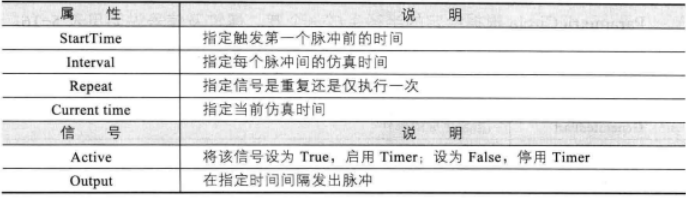
12.Timer
Timer用於指定間隔脈沖Output信號。如果未選中Repeat,在Interval中指定的間隔後將觸發一個脈沖;如果選中,在Interval指定的間隔後重復觸發 脈沖。
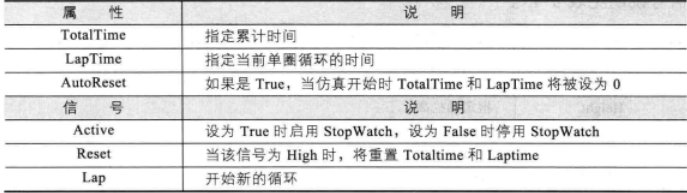
13.StopWatch
StopWatch計量了仿真的時間(TotalTime )。觸發Lap輸入信號將開始新的循環。LapTime顯示當前單圈循環的時間。只有Active設為1時才開始計時。當設置Reset輸入信號時,時間將被重置。
二、“參數與建模”子組件
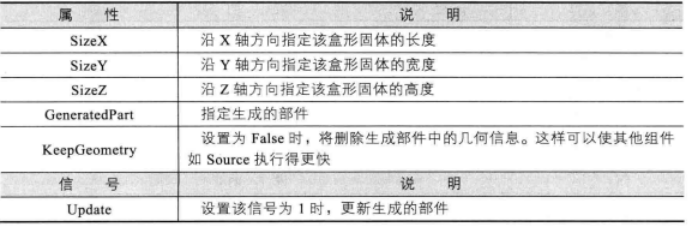
1.ParametricBox
ParametricBox生成一個指定長度、寬度和高度的方框。
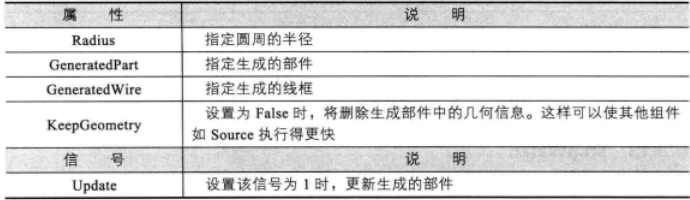
2.ParametricCircle
ParametricCircle根據給定的半徑生成一個圓。
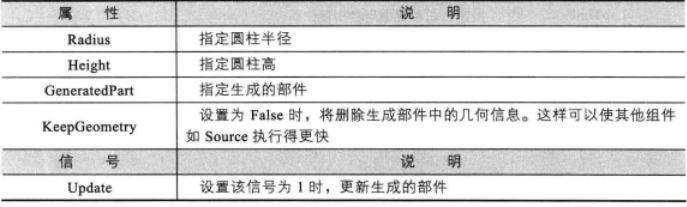
3.ParametricCylinder
ParametricCyUnder根據給定的Radius和Height生成一個圓柱體。
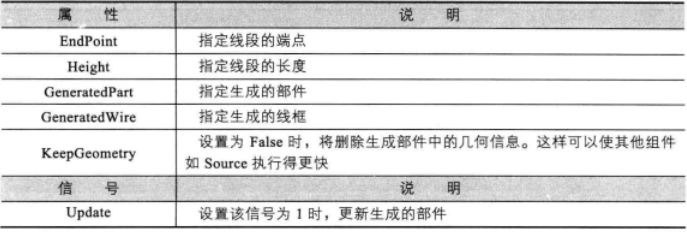
4.ParametricLine
ParametricLine根據給定端點和長度生成線段。如果端點或長度發生變化,生成的線段將隨之更新。
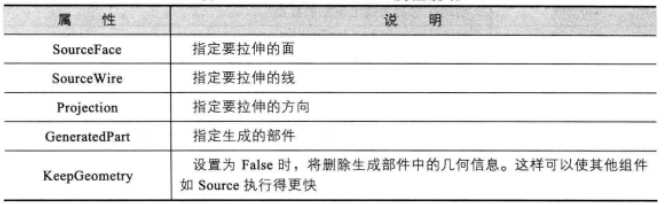
5.LinearExtrusion
LinearExtrusion 沿著 Projection 指定的方向拉伸 SourceFace或 SourceWire。
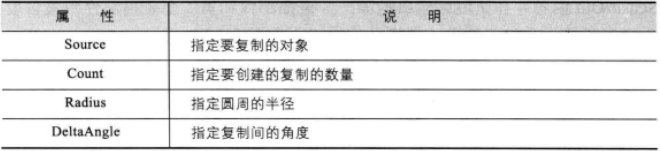
6.CircularRepeater
CircularRepeater 根據給定的 DeltaAngle 沿 SmartComponent 的中心創建一定數量的Source的復制。
7.LinearRepeater
LinearRepeater根據Offset給定的間隔和方向創建一定數量的Source的復制。

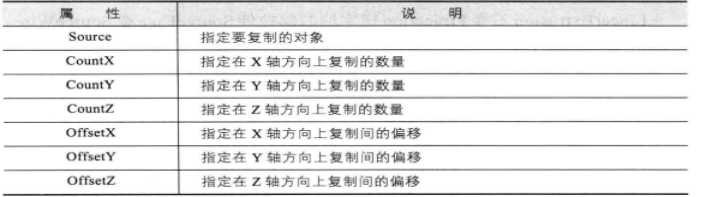
8.MatrixRepeater
MatrixRepeater在三維環境中以指定的間隔創建指定數量的Source對象的復制。
三、“傳感器"子組件
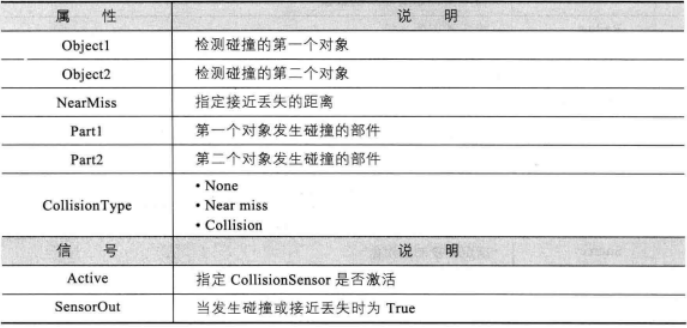
1. CollisionSensor
CollisionSensor檢測第一個對象和第二個對象間的碰撞和接近丟失。如果其中一個對象沒有指定,將檢測另外一個對象在整個工作站中的碰撞。當 Active信號為High、發生碰撞或接近丟失並且組件處於活動狀態時,設置 SensorOnt信號並在屬性編輯器的第一個碰撞部件和第二個碰撞部件中報告發生碰撞或接近丟失的部件。
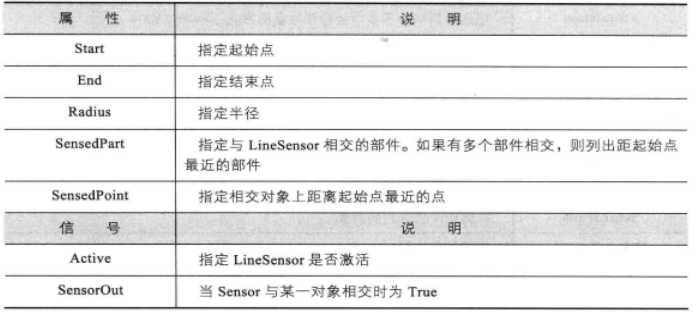
2.LineSensor
LineSensor 根據 Start、End 和 Radius 定義一條線段。當 Active 信號為 High時,傳感器將檢測與該線段相交的對象。相交的對象顯示在ClosestPart屬性中,距線傳感器起點最近的相交點顯示在ClosestPoint屬性中。出現相交時, 會設置SensorOut輸出信號。
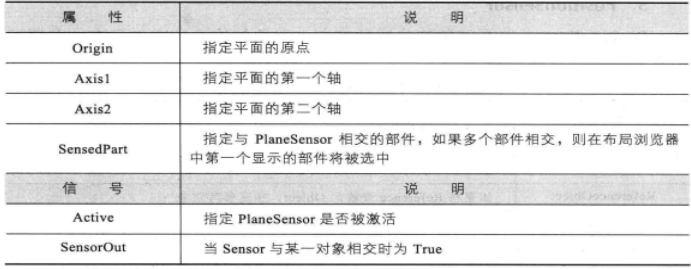
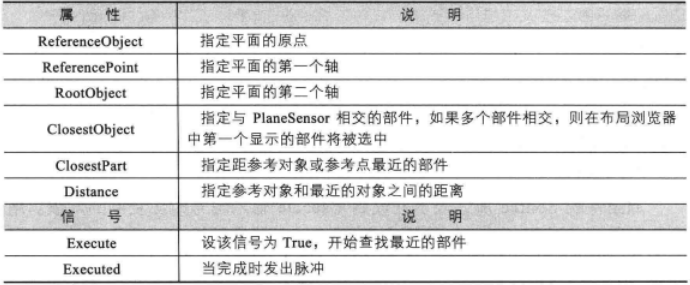
3. PlaneSensor
PlaneSensor通過Origin、Axisl和Axis2定義平面。設置Active輸入信號時,傳感器會檢測與平面相交的對象。相交的對象將顯示在SensedPart屬性中。出現相交時,將設置SensorOut輸出信號。
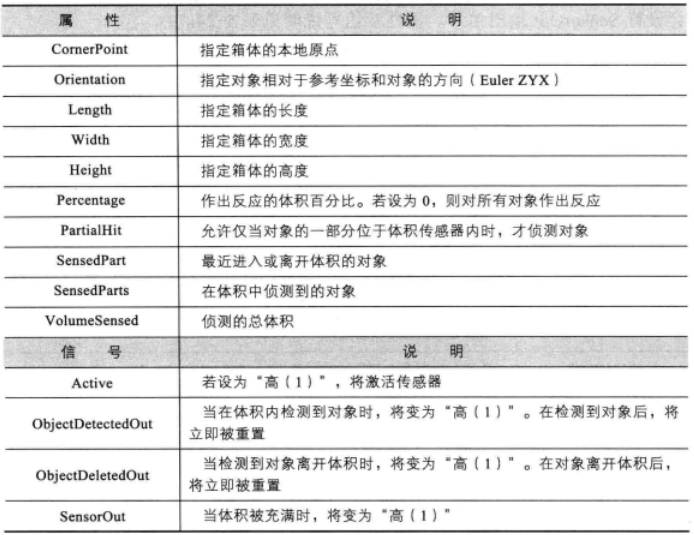
4.VolumeSensor
VolumeSensor檢測全部或部分位於箱形體積內的對象。體積用角點、邊長、邊高、邊寬和方位角定義。
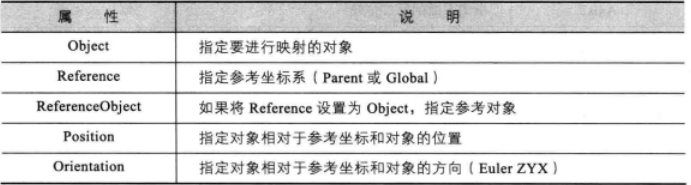
5.PositionSensor
PositionSensor監視對象的位置和方向,對象的位置和方向僅在仿真期間被更新。
6.ClosestObject
ClosestObject定義了參考對象或參考點。設置Execute信號時,組件會找到ClosestObject、ClosestPart和相對於參考對象或參考點的Distance(如未定義參考對象)。如果定義了 RootObject,則會將搜索的範圍限制為該對象和其同源的對象。完成搜索並更新了相關屬性時,將設置Executed 信號。
四、“動作”子組件
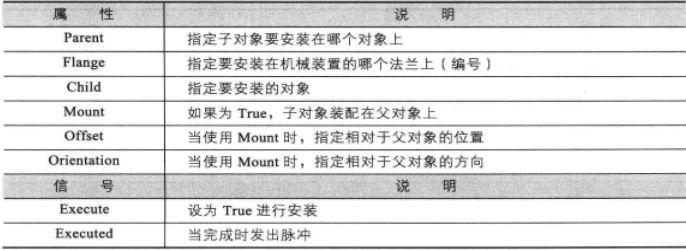
1. Attacher
設置Execute信號時,Attacher將Child安裝到Parent上。如果Parent為機械裝置,還必須指定要安裝的Flange。設置Execute輸入信號時,子對 象將安裝到父對象上。如果選中Mount,還會使用指定的Offset和Orientation 將子對象裝配到父對象上。完成時,將設置Executed輸出信號。
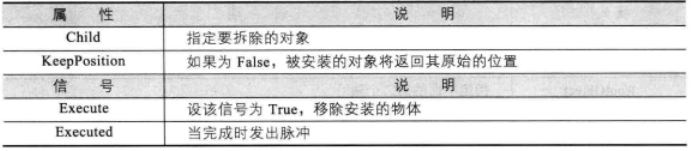
2.Detacher
設置Execute信號時,Detacher會將Child從其所安裝的父對象上拆除。 如果選中了 Keep position,
位置將保持不變。否則相對於其父對象放置子對象的位置。完成時,將設置Executed信號。
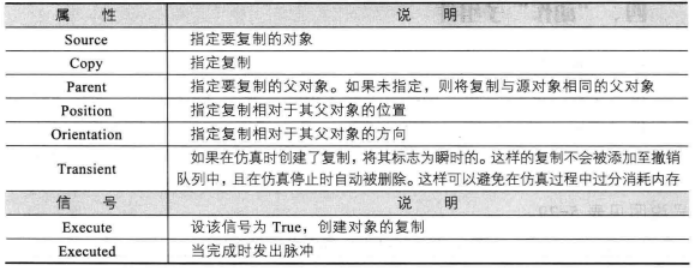
3.Source
源組件的Source屬性表示在收到Execute輸入信號時應復制的對象。所復制對象的父對象由Parent屬性定義,而Copy屬性則指定對所復制對象的參 考。輸出信號Executed表示復制已完成。
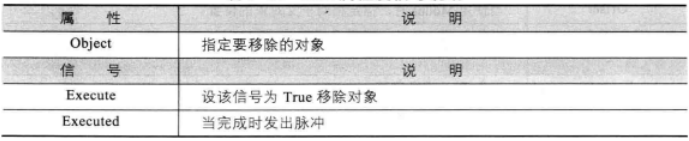
4.Sink
Sink會刪除Object屬性參考的對象。收到Execute輸入信號時開始刪除。 刪除完成時設置Executed輸出信號。
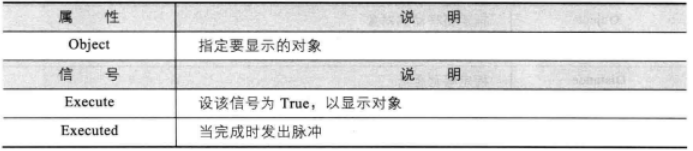
5. Show
設置Execute信號時,將顯示Object中參考的對象。完成時,將設置 Executed信號。
6.Hide
設置Execute信號時,將隱藏Object中參考的對象。完成時,將設置 Executed信號。

五、“本體”子組件
1. LinearMover
LinearMover會按Speed屬性指定的速度,沿Direction屬性中指定的方向,移動Object屬性中參考的對象。設置Execute信號時開始移動,重設Execute 時停止。
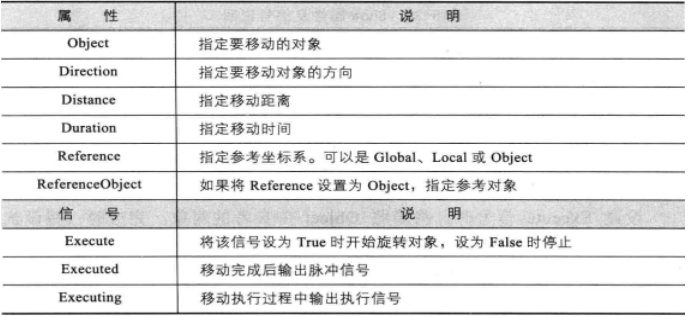
2. LinearMover2
LinearMoved將指定物體移動到指定的位置。
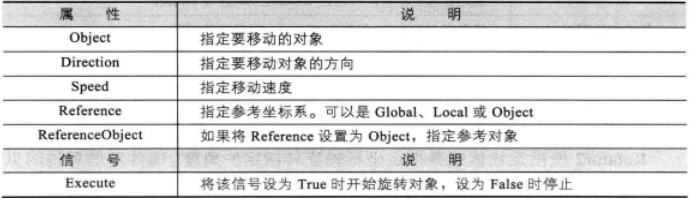
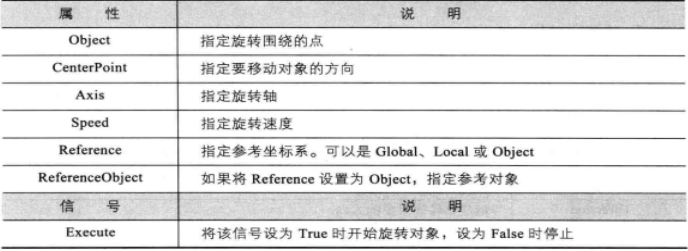
3.Rotator
Rotator會按Speed屬性指定的旋轉速度旋轉Object屬性中參考的對象。旋轉軸通過CenterPoint和Axis進行定義。設置Execute輸入信號時開始運動, 重設Execute時停止運動。
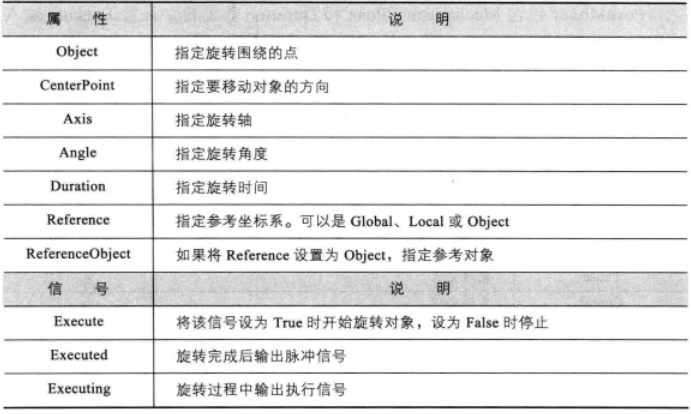
4.Rotator2
Rotator2使指定物體繞著指定坐標軸旋轉指定的角度。
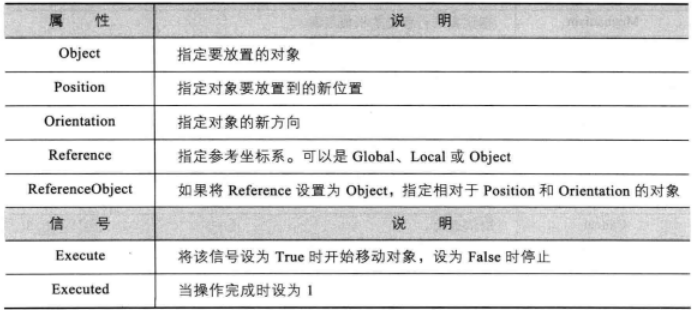
5.Positioner
Positioner具有對象、位置和方向屬性。設置Execute信號時,開始將對象向相對於Reference的給定位置移動。完成時設置Executed輸出信號。
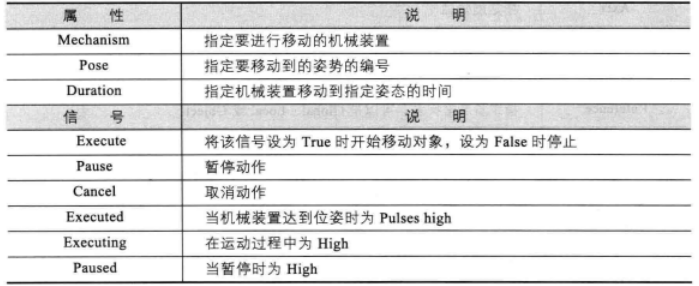
6.PoseMover
PoseMover 包含 Mechanism、Pose 和 Duration 等屬性。設置 Execute 輸入信號時,機械裝置的關節值移向給定姿態。達到給定姿態時,設置Executed 輸出信號。
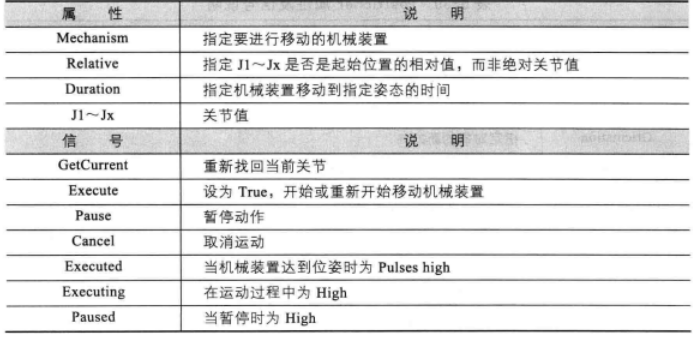
7.ointMover
JointMover包含機械裝置、關節值和執行時間等屬性。當設置Execute信號時,機械裝置的關節向給定的位姿移動。當達到位姿時,使Executed輸出信號。使用GetCurrent信號可以重新找回機械裝置當前的關節值。
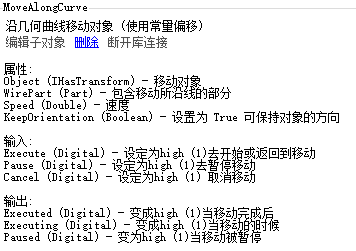
8.MoveAlongCurve
LinearMover2會按Speed屬性指定的速度,沿Direction屬性中指定的方向,移動Object屬性中參考的對象。設置Execute信號時開始移動,重設Execute時停止。
六、“其他”子組件
1. GetParent
GetParent返回輸入對象的父對象。找到父對象時,將觸發"已執行信號。

2. GraphicSwitch
通過單擊圖形中的可見部件或設置重置輸入信號在兩個部件之間轉換。

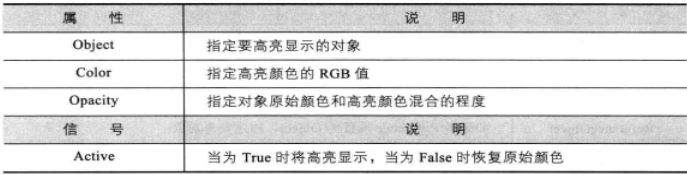
3. Highlighter
臨時將所選對象顯示為定義了 RGB值的高亮色彩。高亮色彩混合了對象的原始色彩,通過Opacity進行定義。當信號Active被重設,對象恢復原始顏色。
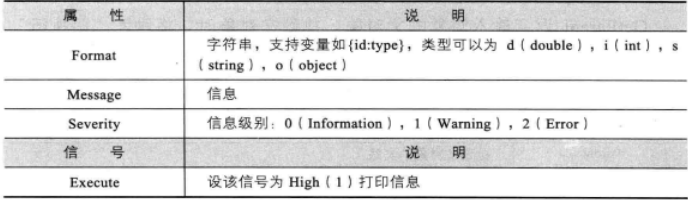
4.Logger
打印輸出窗口的信息。
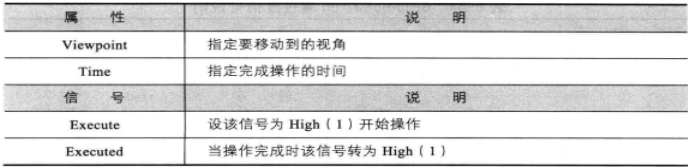
5.MoveToViewPoint
當設置輸入信號Execute時,在指定時間內移動到選中的視角。當操作完成時,設置輸出信號Executed。
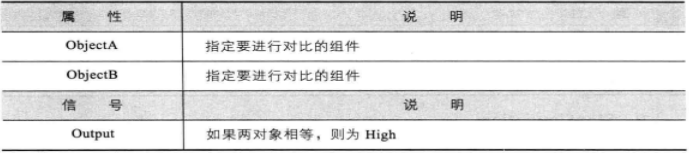
6.ObjectComparer
比較ObjectA是否與ObjectB相同。
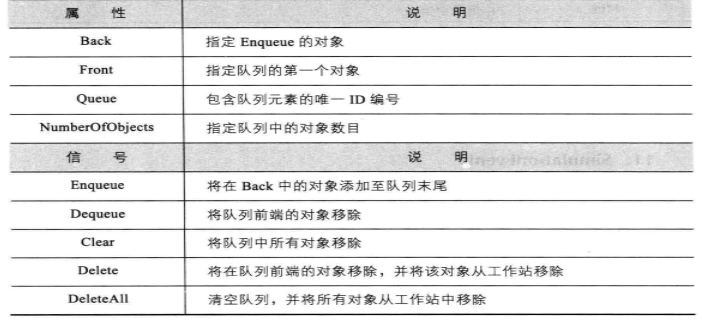
7.Queue
表示FIFO ( first in, first out )隊列。當信號Enqueue被設置時,在Back中的對象將被添加到隊列中。隊列前端對象將顯示在Front中。當設置 Dequeue信號時,Front對象將從隊列中移除。如果隊列中有多個對象,下一個對象將顯示在前端。當設置Clear信號時,隊列中所有對象將被刪除。如果Transformer組件以Queue組件作為對象,該組件將轉換Queue組件中的內容而非Queue組件本身。
8.SoundPlayer
當輸入信號被設置時,播放使用SoundAsset指定的聲音文件,必須為.wav 文件。

9.StopSimulation
當設置了輸入信號Execute時,停止仿真。

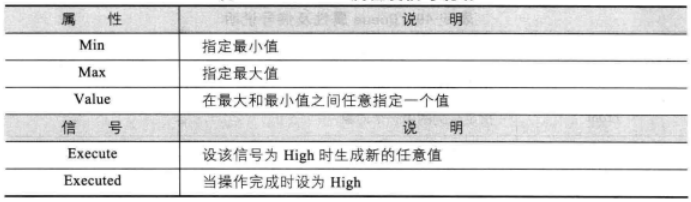
10.Random
當Execute被觸發時,生成最大最小值間的任意值。
11.SimulationEvents
在仿真開始和停止時,發出脈沖信號。

從書本上剪切出來,方便個人使用!!
ABB-robotstudio離線編程-Smart組件資料-筆記