
空間譜專題11:子陣平滑與秩虧缺
阿新 • • 發佈:2017-09-30
ans mage tar link ref itl ges sub href
作者:桂。
時間:2017-09-29 21:20:18
鏈接:http://www.cnblogs.com/xingshansi/p/7612984.html
未完待續。。。
前言
主要分析在解相幹算法中,子陣平滑的有效性。
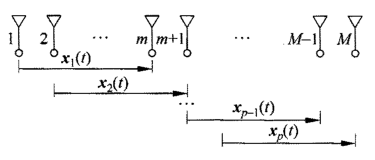
一、前向平滑
以均勻線陣(ULA)為例,第l個接收陣元的信號為:

其中 ,M為陣元數,N為信號個數。
,M為陣元數,N為信號個數。
以前向平滑為例:
令β =  ,對於第k個子陣有
,對於第k個子陣有

其中D為:

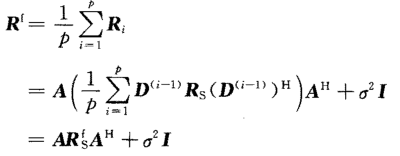
假設信號與噪聲不相關,且噪聲為白噪聲,計算相關矩陣:

前向平滑修正的協方差矩陣:
證明:當子陣陣元數m>=N,且當p>=N時,Rf為滿秩矩陣。
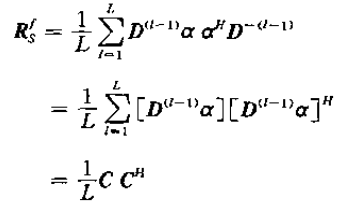
對於相幹情況,Rs的秩為1,故可以用矢量相乘的形式表示:
則
顯然C與Rsf的秩是一致的。式中
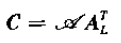
C可進一步表示為
其中
,α為對應信號的幅度,因此該矩陣rank = K
AL是Vandermonde矩陣:
從而有:
進一步得出結論:
得證。




上面的推導是教科書中的推導,以兩個子陣、兩個信號為例,假設兩個子陣的間距為D,對應的A可寫為:
雖然具有Vandermonde結構,但即使入射角度不同,上面的矩陣仍然可能出現rank = 1的情況,只要滿足(k為整數):

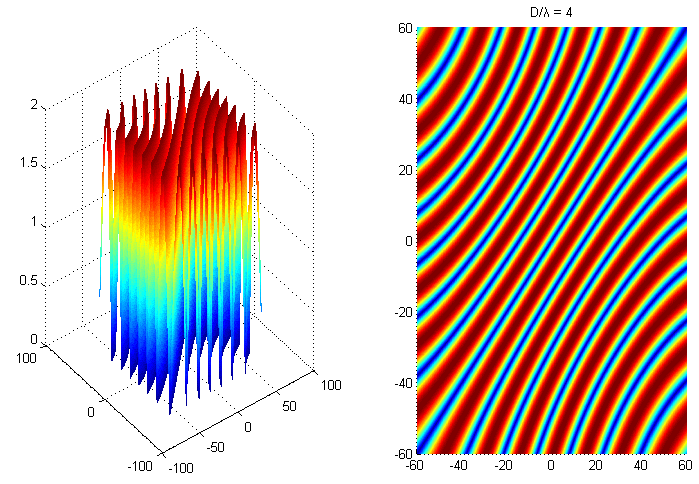
任意取D = 4*λ,theta1、2分別取-60°~60°,仿真結果:
D = 2*λ,進行仿真:
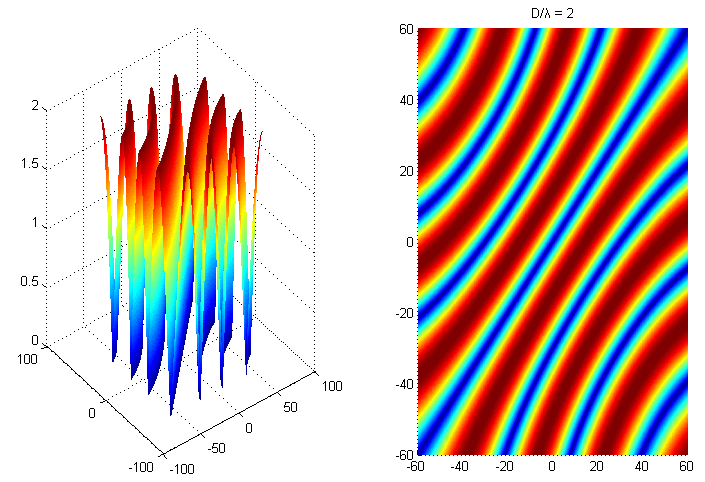
當兩個相位差2pi整數倍,如圖藍線所示,此時相關矩陣的秩仍然是虧缺的,此時譜估計解相幹失效,這裏稱藍色區域為盲區。以MUSIC算法為例,自然也無從談起矩陣分解以及譜估計。另一方面,D與λ比值的取值越小,則盲區越小。
二、後向平滑算法
三、前後向平滑算法
四、前向、後向、前後向平滑與陣列的關系
五、前後向與非均勻的關系
六、非均勻鏡像中坐標點的影響
主要影響D,近而影響盲區
空間譜專題11:子陣平滑與秩虧缺