
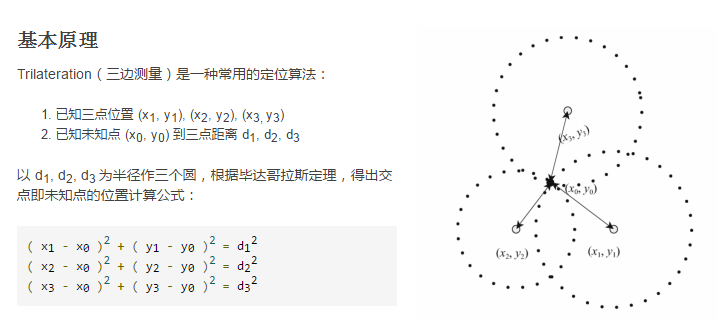
MATLAB實現三邊定位
阿新 • • 發佈:2017-10-10
log erro 表示 方差 bsp hold on tlab rand eas
MATLAB實現
trilateration_position.m
1 % ----------------采用三邊定位法對未知節點定位------------------------------- 2 3 %{ 4 clc命令是用來清除命令窗口的內容。不管開啟多少個應用程序,命令窗口只有一個, 5 所以clc無論是在腳本m文件或者函數m文件調用時,clc命令都會清除命令窗口的內容。 6 7 clear命令可以用來清除工作空間的內容。MATLAB有個基本的工作空間,用base標識, 8 此外,當打開一個函數m文件時,可能會產生很多工作空間。每一個函數對應一個工作空間。9 %} 10 clear; 11 12 maxx = 1000;%參考節點分布的最大橫坐標 13 maxy = 1000;%參考節點分布的最大縱坐標 14 15 %----------------------隨機初始化三個已知的參考點[cx,cy]----------------- 16 %{ 17 rand()產生0和1之間均勻分布的隨機數 18 rand(m)產生一個m*m的矩陣,當然矩陣的值是0和1之間均勻分布的隨機數 19 rand(m,n)或者rand([m,n])產生一個m*n的矩陣 20 randn()產生均值為0, 方差為1的正態分布的隨機數。用法和rand類似。21 %} 22 cx = maxx*rand(1,3); 23 cy = maxy*rand(1,3); 24 plot(cx,cy,‘k^‘);%參考節點圖 25 26 %--------隨機初始化一個未知節點(mx,my)----------- 27 mx = maxx*rand(); 28 my = maxy*rand(); 29 hold on; 30 % 盲節點圖 31 plot(mx,my,‘go‘); 32 33 da = sqrt((mx-cx(1))^2+(my-cy(1))^2); 34 db = sqrt((mx-cx(2))^2+(my-cy(2))^2); 35dc = sqrt((mx-cx(3))^2+(my-cy(3))^2); 36 37 % 計算定位坐標 38 [locx,locy] = triposition(cx(1),cy(1),da,cx(2),cy(2),db,cx(3),cy(3),dc); 39 plot(locx,locy,‘r*‘); 40 legend(‘參考節點‘,‘盲節點‘,‘定位節點‘,‘Location‘,‘SouthEast‘); 41 title(‘三邊測量法的定位‘); 42 43 derror = sqrt((locx-mx)^2 + (locy-my)^2); 44 disp(derror);
triposition.m
1 function [locx,locy] = triposition(xa,ya,da,xb,yb,db,xc,yc,dc) 2 % 三點定位法 % 3 %輸入: 4 % 1.參考節點A(xa,ya),B(xb,yb),C(xc,yc) 5 % 2.定位節點D(locx,locy)到這三點的距離分別為da,db,dc 6 %返回: 7 % (locx,locy)為計算的定位節點D點的位置坐標 8 % 9 syms x y %f符號變量 10 %--------------求解方程組------------------------------------ 11 f1 = ‘2*x*(xa-xc)+xc^2-xa^2+2*y*(ya-yc)+yc^2-ya^2=dc^2-da^2‘; 12 f2 = ‘2*x*(xb-xc)+xc^2-xb^2+2*y*(yb-yc)+yc^2-yb^2=dc^2-db^2‘; 13 % 解關於x,y的符號方程組,得到解的符號表示,並存入xx,yy 14 [xx,yy] = solve(f1,f2,x,y); 15 px = eval(xx); %解的數值px(1),px(2) 16 py = eval(yy); %解的數值py(1),py(2) 17 locx = px; 18 locy = py;
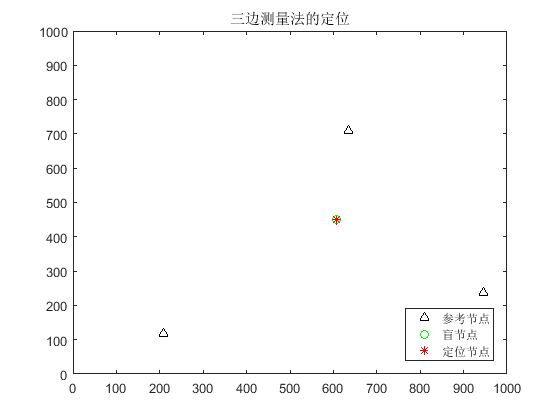
運行效果
MATLAB實現三邊定位