
ROS學習筆記--rplidar
最近入手一個rplidarA2,這篇文章主要記錄一下學習的過程:
ubuntu16.04
ROSkInetic
(一)rplidar的驅動安裝
參考網址:創客製造
(二)rplidar用hector_mapping建圖
參考網址:https://blog.csdn.net/SLAMTEC/article/details/53940920
https://blog.csdn.net/sdhjqhjq1/article/details/79144505
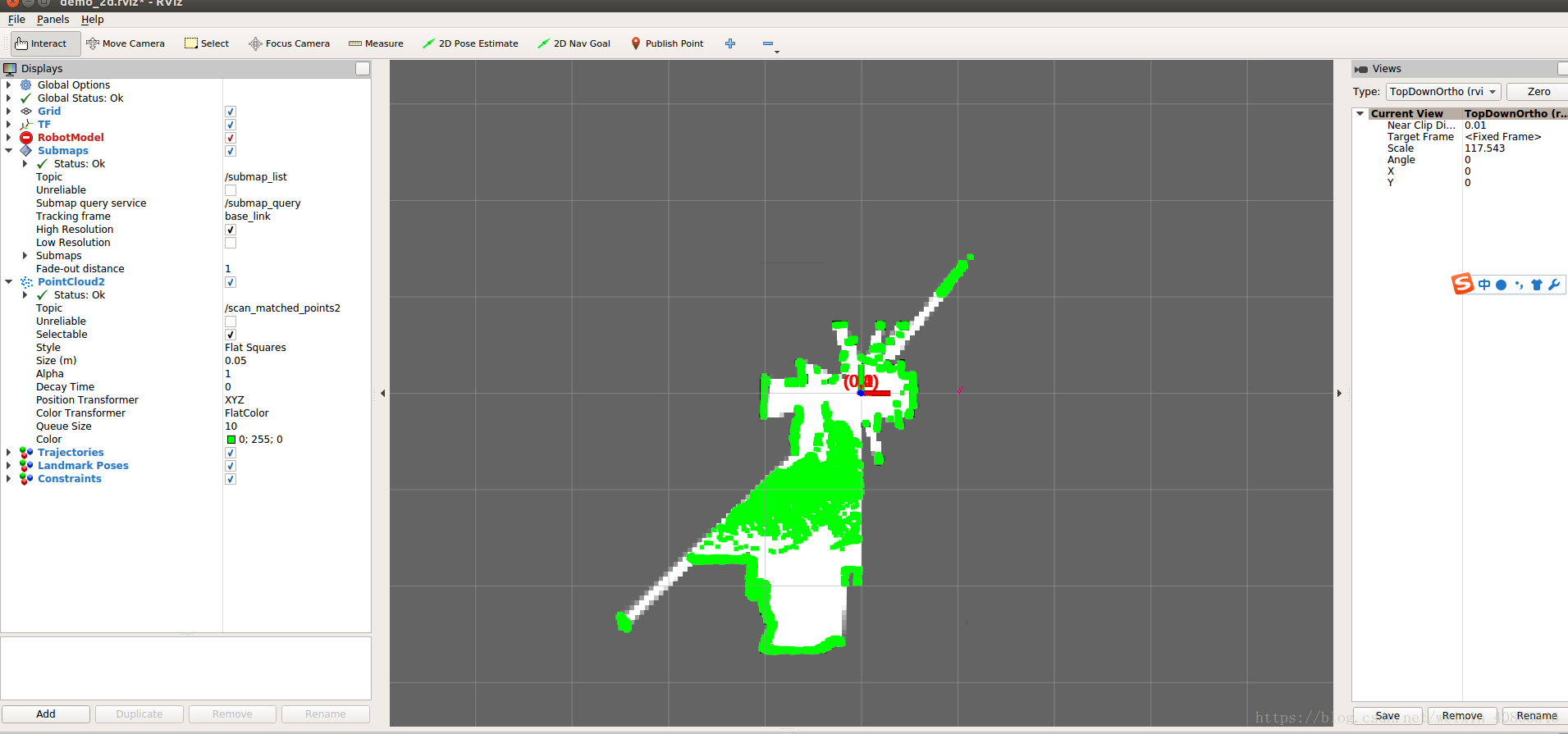
(三)rplidar用cartagrapher建圖
參考網址:https://www.cnblogs.com/yhlx125/p/8078697.html
參考網址2.0:http://blog.exbot.net/archives/2852
效果如下圖:
相關推薦
ROS學習筆記--rplidar
最近入手一個rplidarA2,這篇文章主要記錄一下學習的過程: ubuntu16.04 ROSkInetic (一)rplidar的驅動安裝 參考網址:創客製造 (二)rplidar用hector_mapping建圖 參考網址:https://blog.csdn.net/S
算法導論學習筆記(2)-歸並排序
mar 今天 iostream 介紹 font 額外 遞歸 size dsm 今天學習了算法導論上的歸並排序算法,而且完畢了在紙上寫出偽代碼,曾經就學過歸並可是理解的不夠透徹。以 前還一直困惑:為什麽明明歸並排序比快排的時間復雜度更穩定。為什麽庫函數不用歸
《C++程式設計語言》學習筆記1-容器
容器 容器名 資料結構 vector<T> 可變大小向量 list<T> 雙向連結串列 forward_list<T> 單向連結串列 deque<T> 雙端佇列 set<T&g
php學習筆記6- header dirname 以及大括號的作用
php學習筆記6 header dirname 以及大括號的作用 常用函式 header(); 用於傳送原生的http頭 <?php header("HTTP/1.0 404 Not Foun
live555學習筆記5-RTSP服務運作
五 RTSP服務運作 基礎基本搞明白了,那麼RTSP,RTP等這些協議又是如何利用這些基礎機制運作的呢? 首先來看RTSP. RTSP首先需建立TCP偵聽socket。可見於此函式: [cpp] view plaincopyprint? DynamicRTSPServ
AlexNet學習筆記1-ImageNet Classification with Deep Convolutional Neural Networks
引言 最近受AlphaGo的刺激,開始從google新開源的Tensorflow庫學習DeepLearning。便匆匆忙忙的把環境搭建好,配合官網教程學習原始碼,但是由於之前沒在意機器學習這塊的知識,感覺拉下了不少功課,在Image Recognition章的
Live555學習筆記14-live555多執行緒論
十四:live555多執行緒論 江湖傳聞:live555如果不改為多執行緒,在多核心機器上效率會降低. 雖然我沒做過測試,但比較相信此傳聞的真實性 . 所以在我試論述一下live555如何對多核進行支援,其實就是改為多執行緒,嘿嘿. 先看此文:http://www.live555.com/liveMedia
live555學習筆記1-引子
一直想研究live555,沒有時間,終於因為專案的原因可以深入無間地研究一下了.所以在此著文以記之. 一 如何編譯live555 利用mingw環境很容易:在live555資料夾下, genMakefiles mingw make 即可. 可以用genWi
ES6學習筆記二--構建工具指令碼
安裝依賴包:~/es6 $ npm install gulp gulp-if gulp-concat webpack webpack-stream vinyl-named gulp-livereload gulp-plumber gulp-rename gulp-ugli
經典SQL學習筆記 (十)-學生資訊資料庫練習
學生資訊資料庫 1) 建立一張學生表,包含以下資訊,學號,姓名,年齡,性別,家庭住址,聯絡電話 ,其中id為主鍵,且設定自增長,姓名不能為空。 ---------------------------
javascript學習筆記(八)--錯誤處理
1.onerror事件處理函式onerror事件處理函式是第一個用來協助javascript處理錯誤的機制。頁面上出現異常時,error事件便在window物件上觸發。例如: <html><head><title>OnError Examp
live555學習筆記15-RTCPInstance類小結
十五:RTCPInstance類小結 RTCPInstance是對rtcp通訊的封裝.RTCP主要是功能是統計包的收發為流量控制提供依據.RTCPInstance統計資料的取得僅依賴於RTPSink的一些函式(因為RTPSink傳送RTP包),所以RTCPInstance
Objective-C基礎學習筆記(三)-面向物件的三大特性之封裝
面向物件的三大特性:封裝(成員變數)、繼承、多型; 一、 封裝 1. 封裝的理解: 在開發過程中,考慮到安全性要求,我們通常不讓外界直接修改我們類的成員變數,而讓外界使用我們提供的方法來修改,這樣類 的成員變數就 封裝起來了。 2. 封裝的目的就
Oracle XML學習筆記1 - 儲存XML資料
1、儲存XML資料的方法 大致來說分為兩種:(1)XMLType、(2)普通的關係表。 (1)、其中XMLType的儲存又可分為(a)基於XML模式(XML Schema)的儲存、(b)非基於XML模式的儲存。 (a)、基於XML模式的儲存可為:(a1)XML
live555學習筆記2-基礎類
二 基礎類 講幾個重要的基礎類: BasicUsageEnvironment和UsageEnvironment中的類都是用於整個系統的基礎功能類.比如UsageEnvironment代表了整個系統執行的環境,它提供了錯誤記錄和錯誤報告的功能,無論哪一個類要輸出錯誤,就
Robot Operating System (ROS)學習筆記4---語音控制
sla 語音 出現 tput http 學習 process 輸入 ubun 搭建環境:XMWare Ubuntu14.04 ROS(indigo) 轉載自古月居 轉載連接:http://www.guyuehome.com/260 一、語音識別包 1、安裝
ROS學習筆記_編寫客戶端和服務器(service and client)_C++(五)
ber bsp 客戶端 service ++ 參考 subscribe 編寫 client 註意要區分service、client和publisher、subscriber這兩組概念的區別。 先占坑。。。 參考鏈接:Writing a Simple Serv
ROS學習筆記(一):工作空間的定義和建立方法
一、工作空間(Workspace): 定義 :存放工程開發相關檔案的資料夾。 檔案構成:( Workspace 下基本資料夾) src:程式碼空間,放置功能包原始碼的空間; build:編譯空間,編譯過程中產生的中間檔案; devel:開發空間,編譯完成後的
ROS學習筆記(三):自定義話題的程式設計
前言:ros給我們提供了眾多的訊息結構,但是更多時候我們需要根據自己的研發需求定義自己的訊息結構。 一、檢視ros自帶的訊息結構 我們最常用的一個訊息結構就是std_msgs,那麼怎麼檢視這個訊息結構支援可以定義哪些資料型別呢? 我們使用roscd std_msgs/這個命令開啟該訊息結
ROS學習筆記(一):建立工作空間和功能包
所有的ROS程式,包括我們自己開發的程式,都被組織成功能包,而ROS的功能包被存放在稱之為工作空間的目錄下。因此,在我們寫程式之前,第一步是建立一個工作空間以容納我們的功能包。其實ROS工作空間就是linux下的一個目錄,建立ROS工作空間就是建立一個linux目錄(我們建立名為catkin_ws的