
智慧汽車無人駕駛資料調研(三)
資料來源:長江證券
1.1 長江證券 2015/12
邏輯思路類似:IT 企業和汽車企業選擇路徑有所差異。IT 企業使用鐳射雷達+高精地圖+人工智慧直接實現無人駕駛,汽車企業將從輔助駕駛逐步進入自動駕駛。不管哪條路徑,智慧和網聯是實現汽車高度自動化的基礎,單車的智慧將先行與交通的智慧。以環境感知和電控執行為核心的ADAS 肩負著提高安全和通向無人駕駛的使命,將在汽車智慧化不斷提高中進入快速成長期。
以Google 和百度為代表的IT 企業與主流汽車企業的分歧本質是來自於理念的不同。IT企業崇尚完全的無人駕駛,這樣就可以發揮他們自身在人工智慧深度學習和高精度地圖
上的優勢提供路徑規劃決策,並與自身深厚的內容資源相結合打造無人駕駛的生態圈。汽車企業崇尚自動駕駛是給駕駛員另一個選擇,“人機雙控”是必須的,在無人駕駛的行進中更重視安全性和商業化,高階輔助駕駛是目前的選擇。


1. 單車智慧、交通智慧是實現無人駕駛兩條路徑,單車智慧將先於交通智慧
智慧化:ADAS(高階輔助駕駛系統):使用感測器技術時得汽車本身具備感知能力,通過演算法對不同路況的分析決策實現自動駕駛。配備足夠數量的ADAS 系統已經能實現高度的自動駕駛,德爾福等公司已經證明了這一點。
網聯化:V2V(車車通訊)、V2I(車與基礎設施通訊)的加入是車與車之間的協作更加有效,對道路的通訊能及時瞭解交通訊號燈等變化做出反應。車際網能車輛瞭解附近的位臵資訊和速度資訊以及道路的交通狀況。這樣減少了車輛自身對周邊環境的感知。
1)google:Google 無人駕駛的原理簡單來說是採用鐳射攝像頭周邊環境進行全景掃描建立3D 模型並和Google 的高精度地圖進行完美匹配,這樣就可以實現車輛釐米級的定位。而其他的毫米波雷達、攝像頭、輪速感測器等則是輔助作用。
- 鐳射雷達:採用Velodyne HDL-64 的360 度64 束鐳射感測器,可以實現對周邊環境快速精準的掃描建模。但造價較為昂貴(約8 萬美金)。
- 毫米波雷達:採用大陸的毫米波雷達,用於檢測前方車輛的行車速度。
- 攝像頭:對道路紅綠燈、汽車標識等進行識別.
- 輪速感測器:提供輪速資訊,判斷車速及行進狀態。
(2)百度:百度的無人駕駛汽車採用的技術路徑與Google 類似,通過高精度地圖和64束鐳射雷達實現釐米級的定位。
- 百度對未來降低成本的思路是使用鐳射雷達掃描前方道路,而不是360 度的掃描。這將對鐳射雷達的線束和掃射面積要求下降。相對於64 束的鐳射雷達,32 束的雷達可以降低一半左右成本。對於周邊車輛和行人的檢測,百度會更多依賴毫米波雷達、攝像頭感測器等。
- 與寶馬的合作也是未來百度與整車廠合作的範本。百度未來將尋找第三方的整車企業共同推出無人駕駛汽車,百度提供高精度地圖自動駕駛環境感知、決策和道路規劃;整車廠提供車輛、車身控制和安全技術。
【完全無人駕駛路徑的IT企業與漸進式車廠的主要區別在於應用了高精度地圖、鐳射雷達、更高階的機器學習演算法,同時成本也更高】
2. ADAS四大核心功能

3. mobileye介紹
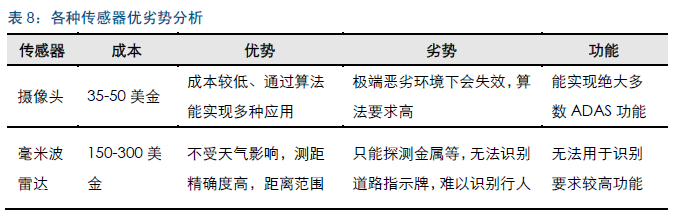
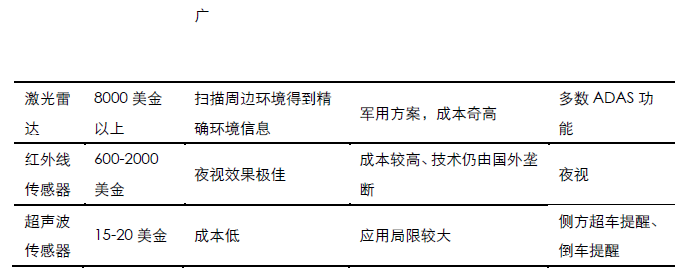
4. 各感測器比較
【此研報重點關注ADAS,及相關企業表現和機會】
1.3 長江證券 2016/2 關注車載攝像頭、毫米波雷達、夜視系統、鐳射雷達四種感測器技術。
1.4 長江證券 2016/7