
NNLearning階段性總結01
阿新 • • 發佈:2018-11-10
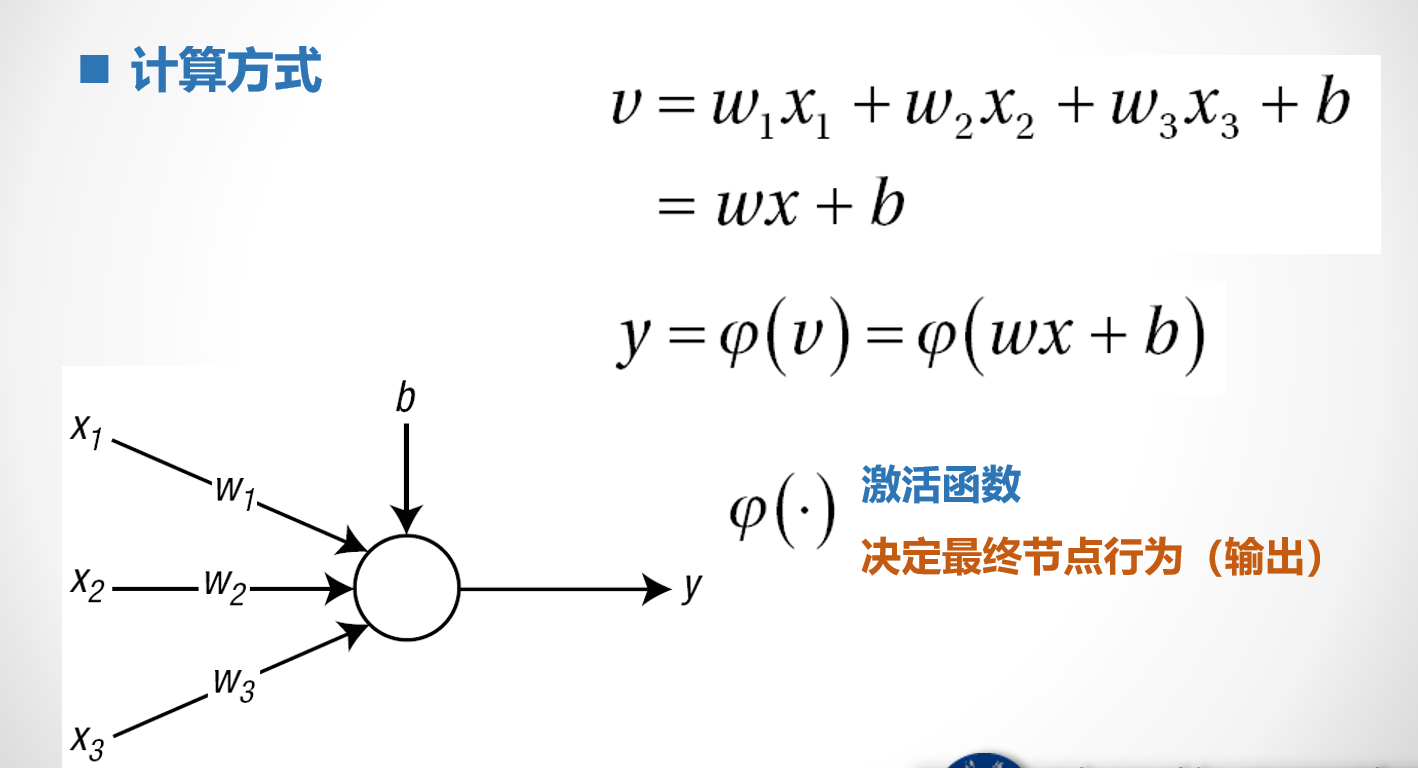
 神經網路最基本的元素與計算流程:
神經網路最基本的元素與計算流程:
基本的組網原則:
神經網路監督學習的基本步驟:
- 初始化權值係數
- 提取一個樣本輸入NN,比較網路輸出與正確輸出的誤差
- 調整權值係數,以減少上面誤差——調整的方法對應不同的學習規則
- 重複二三步,直到所有的樣本遍歷完畢或者誤差在可以容忍的範圍內
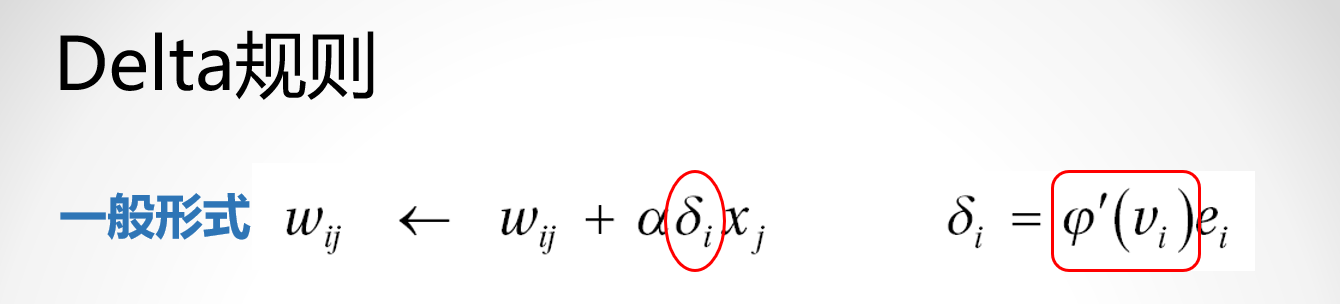
Delta規則:(一種更新權值係數的規則)
-
基於sigmoid函式的Delta規則:優勢,便於用於分類問題——啟用函式選擇

-
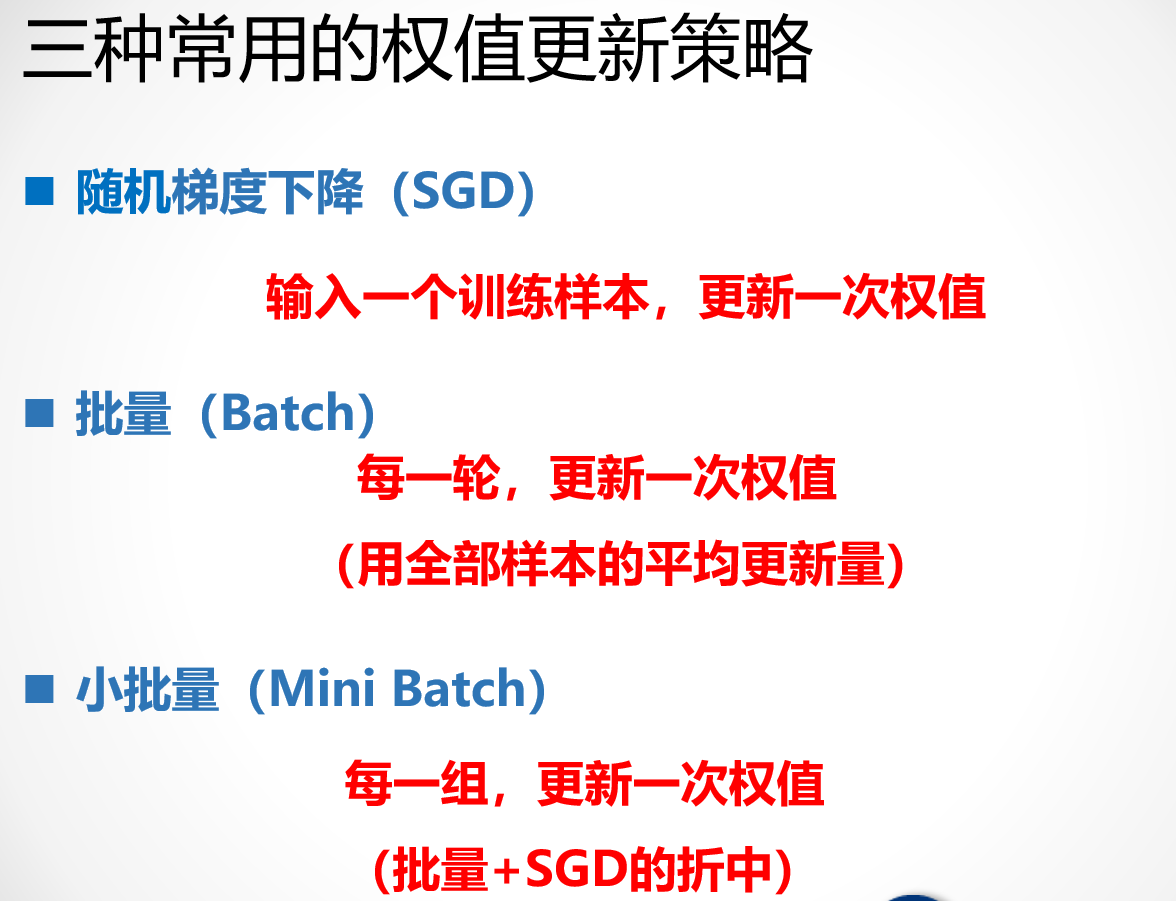
幾種常見權值更新策略:
-
三種更新策略下的程式碼演示
function W = DeltaSGD(W,X,D) alpha= 0.9; N = 4; for i = 1:N x = X(i,:)'; d = D(i); v = W*x; y = sigmoid(v); e = d - y; dy = y*(1-y)*e; dW = alpha*dy*x'; W = dW + W; end end
function W = DeltaBatch(W,X,D) alpha = 0.9; N = 4; dWSum = zeros(1,3); for i = 1:N x = X(i,:)'; d = D(i); v = W*x; y = sigmoid(v); e = d - y; dy = y*(1-y)*e; dW = alpha*dy*x'; dWSum = dWSum + dW; end dWavg = dWSum/N; W = W + dWavg; end
function W = DeltaMiniBatch(W,X,D) alpha= 0.9; N = 4; M = 2; for j = 1:(N/M) dWSum = zeros(1,3); for q = 1:M i = j*(M-1) + q; x = X(i,:)'; d = D(i); v = W*x; y = sigmoid(v); e = d - y; dy = y*(1-y)*e; dW = alpha*dy*x'; dWSum = dWSum + dW; end dWavg = dWSum/M; W = W + dWavg; end end
function y = sigmoid(x) y = 1/(1+exp(-x)); end
function D = DeltaTest()
clear all;%清除所有變數
close all;%關閉所有開啟檔案
X = [0 0 1;0 1 1;1 0 1;1 1 1];% 輸入樣本
D = [0 0 1 1];%對應樣本的答案
% 初始化誤差平方和向量
E1 = zeros(1000,1);
E2 = zeros(1000,1);
E3 = zeros(1000,1);
% 統一初始化權值係數
W1 = 2*rand(1,3) - 1;
W2 = W1;
W3 = W1;
% 使用三種方法訓練1000輪 同時每一輪計算一次誤差平方
for epoch = 1:1000
%各自完成一輪訓練
W1 = DeltaSGD(W1,X,D);
W2 = DeltaBatch(W2,X,D);
W3 = DeltaMiniBatch(W3,X,D);
% 計算這一輪結束後的誤差平方
N= 4;
for i = 1:N
%利用誤差計算方法計算誤差
% E1
x = X(i,:)';
d = D(i);
v1 = W1*x;
y1 = sigmoid(v1);
E1(epoch) = E1(epoch) + (d - y1)^2;
% E2
v2 = W2*x;
y2 = sigmoid(v2);
E2(epoch) = E2(epoch) + (d - y2)^2;
% E3
v3 = W3*x;
y3 = sigmoid(v3);
E3(epoch) = E3(epoch) + (d - y3)^2;
end
end
for i = 1:4
x = X(i,:)';d = D(i);
v = W1*x;
y = sigmoid(v)
end
% 繪製三種演算法策略的差異圖
plot(E1,'r');hold on
plot(E2,'b:');
plot(E3,'k-');
xlabel('Epoch');
ylabel('Sum of Squares of Training Error');
legend('SGD',"Batch",'MiniBatch');
end

