
中點分割演算法
中點分割演算法
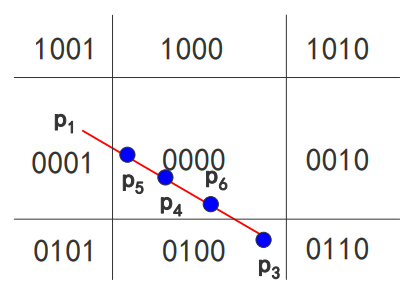
和上面講到的Cohen-Sutherland演算法一樣,首先對直線段的端 點進行編碼。
把線段和視窗的關係分成三種情況
1、完全在視窗內
2、完全在視窗外
3、和視窗有交點
中點分割演算法的核心思想是通過二分逼近來確定直線段與 視窗的交點。

中點分割演算法的核心思想是通過二分逼近來確定直線段與 視窗的交點。
注意:
1、若中點不在視窗內, 則把中點和離視窗邊界最遠點構成的線段丟掉,
以線段上的另一點和該中點再構成線段求其中點

2、如中點在視窗內,則又以中點和最遠點構成線段, 並求其中點,
直到中點與視窗邊界的 座標值在規定的誤差範圍內相等

相關推薦
中點分割演算法
中點分割演算法 和上面講到的Cohen-Sutherland演算法一樣,首先對直線段的端 點進行編碼。 把線段和視窗的關係分成三種情況 1、完全在視窗內 2、完全在視窗外 3、和視窗有交點 中點分割演算法的核心思想是通過二分逼近來確定
中點分割直線段裁剪演算法
中點分割演算法原理 中點分割直線段裁剪演算法對Cohen-Sutherland直線裁剪演算法的第3種情況做了改進,原理是簡單地把起點為P0,終點為P1的直線段等分為兩段直線P0P和PP1(P為直線段中點),對每一段直線重複“簡取”和“簡棄”的處理,對於不能處理的直線段再繼續等分下去線
計算機圖形學常用演算法實現8 中點分割裁剪演算法
這種方法使用了二分法查詢邊界,優化了Cohen-Sutherland方法,減小了討論的數量。 程式碼中邊界範圍是200,200到400,400 程式碼如下: int encode(Point p) { int code = 0; if (p.Y > 400)
基於八叉樹的區域增長點雲分割演算法
該篇文章出自2015年ICIP會議,主要介紹影象分割領域一種新的區域生長演算法 [TOC] 參考:https://blog.csdn.net/cjx2lxj/article/details/50529618 提出的問題 鐳射雷達探測到城市環境的物體表面構成三維幾何
南開大學提出最新邊緣檢測與影象分割演算法,精度重新整理記錄(附開源地址)
作者 | 劉雲、程明明、胡曉偉、邊佳旺等 譯者 | 劉暢 整理 | Jane 出品 | AI科技大本營 近日,南開大學媒體計算實驗室提出的最新邊緣檢測和影象過分割(可用於生成超畫素)被 IEEE PAMI 錄用。研究的第一作者也發微博稱:“這是第一個
影象分割演算法
影象分割的主要演算法: 1.基於閾值的分割方法 2.基於邊緣的分割方法 3.基於區域的分割方法 4.基於聚類分析的影象分割方法 5.基於小波變換的分割方法 6.基於數學形態學的分割方法 7.基於人工神經網路的分割方法 8.基於遺傳學演算法的分割方法
從Random Walk談到Bacterial foraging optimization algorithm(BFOA),再談到Ramdom Walk Graph Segmentation圖分割演算法
1. 從細菌的趨化性談起 0x1:物質化學濃度梯度 類似於概率分佈中概率密度的概念。在溶液中存在不同的濃度區域。 如放一顆糖在水盆裡,糖慢慢溶於水,糖附近的水含糖量比遠離糖的水含糖量要高,也就是糖附近的水糖的濃度高,離糖越遠的水糖的濃度越低。 這種濃度的漸減(反方向就是漸增)叫做濃度梯度。可以用單位距
opencv學習筆記五十六:分水嶺分割演算法
一、基於分水嶺的分割演算法是受自然界地貌啟發而來的對灰度圖的地形學解釋,我們考慮以下三點: 1. 區域性最小值點,該點對應一個盆地的最低點,當我們在盆地裡滴一滴水的時候,由於重力作用,水最終會匯聚到該點。注意:可能存在一個最小值面,該平面內的都是最小值點。 2. 盆地的其
STL partition_point分割演算法
可以用 partition_point() 演算法來獲取分割槽序列中第一個分割槽的結束迭代器,它的前兩個引數定義檢查範圍的正向迭代器,最後一個引數是用來對序列進行分割槽的謂詞。我們通常不知道每個分割槽中元素的個數,這個演算法使我們能夠訪問和提取這些分割槽中的元素。例如: std::vecto
STL partition_copy分割演算法
partition_copy() 演算法以和 stable_partition() 相同的方式對序列進行分割槽,但那些使謂詞返回 true 的元素會被複制到一個單獨的序列中,使謂詞返回 false 的那些元素會被複制到第三個序列中。這個操作不會改變原始序列。 原始序列由前兩個引數指定,它們必
STL partition分割演算法
在序列中分割槽元素會重新對元素進行排列,所有使給定謂詞返回 true 的元素會被放在所有使謂詞返回 false 的元素的前面。這就是 partition() 演算法所做的事。 partition 的前兩個引數是定義被分割槽序列範圍的正向迭代器,第三個引數是一個謂詞。下面展示如何使用 part
OTSU閾值分割演算法原理與原始碼
OTSU閾值分割 OTSU閾值處理(最大類間方差),演算法步驟如下: 【1】統計灰度級中每個畫素在整幅影象中的個數。 【2】計算每個畫素在整幅影象的概率分佈。 【3】對灰度級進行遍歷搜尋,計算當前灰度值下前景背景類間概率。 【4】通過目標函式計算出類內與類間方差下對應的閾值
【影象處理中的分割演算法】
區域生長方法也是一種常用的區域分割技術,其基本思路是首先定義一個生長準則,然後在每個分割區域內尋找一個種子畫素,通過對影象進行掃描,依次在種子點周圍鄰域內尋找滿足生長準則的畫素並將其合併到種子所在的區域,然後再檢查該區域的全部相鄰點,並把滿足生長準則的點合併到該區域,
基於深度學習的影象語義分割演算法綜述(截止20180715)
這篇文章講述卷積神經網路在影象語義分割(semantic image segmentation)的應用。影象分割這項計算機視覺任務需要判定一張圖片中特定區域的所屬類別。 這個影象裡有什麼?它在影象中哪個位置? 更具體地說,影象語義分割的目標是將影象的每個畫素所
數字影象處理筆記(十二):影象分割演算法
1 - 引言 在影象識別中,如果可以將影象感興趣的物體或區別分割出來,無疑可以增加我們影象識別的準確率,傳統的數字影象處理中的分割方法多數基於灰度值的兩個基本性質 不連續性 以灰度突變為基礎分割一副影象,比如影象的邊緣 相似性 根據一組預定義的準則將一副影象分割為相似的
直線生成演算法的實現:分別利用DDA演算法、中點Bresenham演算法和改進的Bresenham演算法掃描轉換直線段P1P2
直線生成演算法的實現:分別利用DDA演算法、中點Bresenham演算法和改進的Bresenham演算法掃描轉換直線段P1P2,其中P1為(0, 0), P2為(8, 6)。 // fhk.cpp : 定義控制檯應用程式的入口點。 // #include <iost
中點Bresenham演算法掃描轉換圓心在原點, 半徑為8的圓;
#include <iostream> #include "stdio.h" #include <stdlib.h> #include <cmath> #include <gl/glut.h> using namespace std; void C
Python實現選擇性搜尋分割演算法Selective Search for Object Detection
Selective Search for Object Detection OpenCV實現目標檢測方法,具體參考論文及官方說明: https://www.learnopencv.com/selective-search-for-object-detection-cpp-pyth
最大熵閾值分割演算法
#include <opencv2\opencv.hpp> #include <opencv\cv.h> using namespace cv; int HistogramBins = 256; float HistogramRange1[2
字元分割演算法研究
字元分割 定義:以字串的形式分割字元,達到將驗證碼分割的效果。從定位得到的車牌影象中分離出單個字元(包括漢字、字母和數字等)的影象,以便於字元分割。 初步瞭解:行切分、字切分 參考範例:車牌識別 主要演算法解析 改進的連通域分割法 版面分割是版面分析的重要組成部分,是一個受