
[轉]隨機取樣一致性(RANSAC)
作者:桂。
時間:2017-04-25 21:05:07
連結:http://www.cnblogs.com/xingshansi/p/6763668.html

前言
仍然是昨天的問題,別人問到最小二乘、霍夫變換、RANSAC在直線擬合上的區別。昨天梳理了霍夫變換,今天打算抽空梳理一下RANSAC演算法,主要包括:
1)RANSAC理論介紹
2)RANSAC應用簡介;
內容為自己的學習記錄,其中很多地方借鑑了別人,最後一起給出連結。
一、RANSAC理論介紹
普通最小二乘是保守派:在現有資料下,如何實現最優。是從一個整體誤差最小的角度去考慮,儘量誰也不得罪。
RANSAC是改革派:首先假設資料具有某種特性(目的),為了達到目的,適當割捨一些現有的資料。
給出最小二乘擬合(紅線)、RANSAC(綠線)對於一階直線、二階曲線的擬合對比:

可以看到RANSAC可以很好的擬合。RANSAC可以理解為一種取樣的方式,所以對於多項式擬合、混合高斯模型(GMM)等理論上都是適用的。
RANSAC的演算法大致可以表述為(來自wikipedia):
Given: data – a set of observed data points model – a model that can be fitted to data points n – the minimum number of data values required to fit the model k – the maximum number of iterations allowed in the algorithm t – a threshold value for determining when a data point fits a model d – the number of close data values required to assert that a model fits well to data Return: bestfit – model parameters which best fit the data (or nul if no good model is found) iterations = 0 bestfit = nul besterr = something really large while iterations < k { maybeinliers = n randomly selected values from data maybemodel = model parameters fitted to maybeinliers alsoinliers = empty set for every point in data not in maybeinliers { if point fits maybemodel with an error smaller than t add point to alsoinliers } if the number of elements in alsoinliers is > d { % this implies that we may have found a good model % now test how good it is bettermodel = model parameters fitted to all points in maybeinliers and alsoinliers thiserr = a measure of how well model fits these points if thiserr < besterr { bestfit = bettermodel besterr = thiserr } } increment iterations } return bestfit
RANSAC簡化版的思路就是:
第一步:假定模型(如直線方程),並隨機抽取Nums個(以2個為例)樣本點,對模型進行擬合:
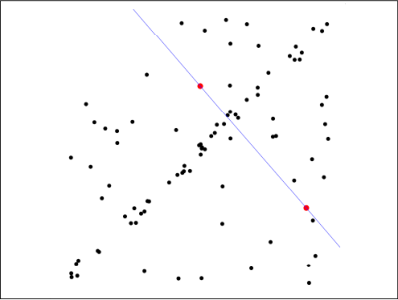
第二步:由於不是嚴格線性,資料點都有一定波動,假設容差範圍為:sigma,找出距離擬合曲線容差範圍內的點,並統計點的個數:
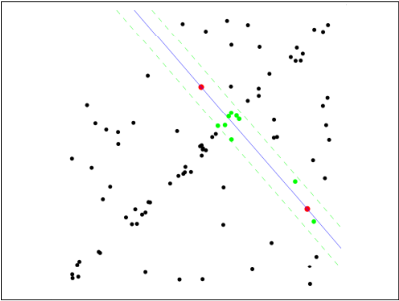
第三步:重新隨機選取Nums個點,重複第一步~第二步的操作,直到結束迭代:

第四步:每一次擬合後,容差範圍內都有對應的資料點數,找出資料點個數最多的情況,就是最終的擬合結果:
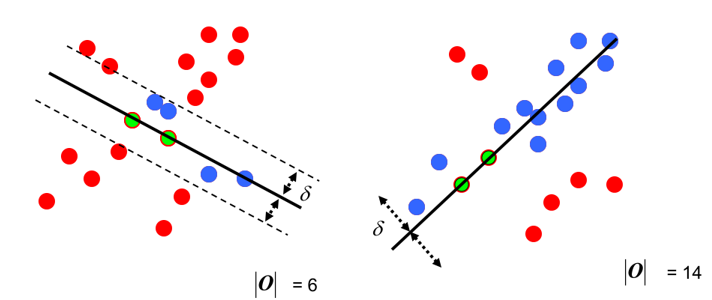
至此:完成了RANSAC的簡化版求解。
這個RANSAC的簡化版,只是給定迭代次數,迭代結束找出最優。如果樣本個數非常多的情況下,難不成一直迭代下去?其實RANSAC忽略了幾個問題:
- 每一次隨機樣本數Nums的選取:如二次曲線最少需要3個點確定,一般來說,Nums少一些易得出較優結果;
- 抽樣迭代次數Iter的選取:即重複多少次抽取,就認為是符合要求從而停止運算?太多計算量大,太少效能可能不夠理想;
- 容差Sigma的選取:sigma取大取小,對最終結果影響較大;
這些引數細節資訊參考:維基百科。
RANSAC的作用有點類似:將資料一切兩段,一部分是自己人,一部分是敵人,自己人留下商量事,敵人趕出去。RANSAC開的是家庭會議,不像最小二乘總是開全體會議。
附上最開始一階直線、二階曲線擬合的code(只是為了說明最基本的思路,用的是RANSAC的簡化版):
一階直線擬合:
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 |
clc
;
clear
all
;
close
all
;
set
(0,
'defaultfigurecolor'
,
'w'
);
%Generate data
param = [3 2];
npa =
length
(param);
x = -20:20;
y = param*[x;
ones
(1,
length
(x))]+3*
randn
(1,
length
(x));
data = [x
randi
(20,1,30);...
y
randi
(20,1,30)];
%figure
figure
subplot
221
plot
(data(1,:),data(2,:),
'k*'
);
hold
on;
%Ordinary least square mean
p =
polyfit
(data(1,:),data(2,:),npa-1);
flms =
polyval
(p,x);
plot
(x,flms,
'r'
,
'linewidth'
,2);
hold
on;
title
(
'最小二乘擬合'
);
%Ransac
Iter = 100;
sigma = 1;
Nums = 2;
%number select
res =
zeros
(Iter,npa+1);
for
i
= 1:Iter
idx =
randperm
(
size
(data,2),Nums);
if
diff
(idx) ==0
continue
;
end
sample = data(:,idx);
pest =
polyfit
(sample(1,:),sample(2,:),npa-1);
%parameter estimate
res(
i
,1:npa) = pest;
res(
i
,npa+1) =
numel
(
find
(
abs
(
polyval
(pest,data(1,:))-data(2,:))<sigma));
end
[~,pos] =
max
(res(:,npa+1));
pest = res(pos,1:npa);
fransac =
polyval
(pest,x);
%figure
subplot
222
plot
(data(1,:),data(2,:),
'k*'
);
hold
on;
plot
(x,flms,
'r'
,
'linewidth'
,2);
hold
on;
plot
(x,fransac,
|