
【 Notes 】 Measurement Model and Principles for TDOA-based Location
TDOA is the difference in arrival times of the emitted signal received at a pair of sensors, implying that clock synchronization across all receivers is required. Nevertheless, the TDOA scheme is simpler than the TOA method because the latter needs the source to be synchronized as well, which implies a higher hardware cost. Similar to the TOA, multiplying the TDOA by the known propagation speed leads to the range difference between the source and two receivers.
As discussed in blog:Time - Difference - of - Arrival ( TDOA ) Estimation Preliminary introduction , geometrically, each noise - free TDOA defines a hyperbola on which the source must lie in the 2 - D space, and the target location is given by the intersection of at least two hyperbolae. In the presence of disturbance, we estimate x from a set of hyperbolic equations converted from the TDOA measurements.
Mathematically, the TDOA measurement model is formulated as follows. We assume that the source emits a signal at the unknown time and the l th sensor receives it at time
with L ≥ 3. There are L ( L − 1)/2 distinct TDOAs from all possible sensor pairs, denoted by
with k > l . However, there are only ( L − 1) nonredundant TDOAs. Taking L = 3 as an example, the distinct TDOAs are
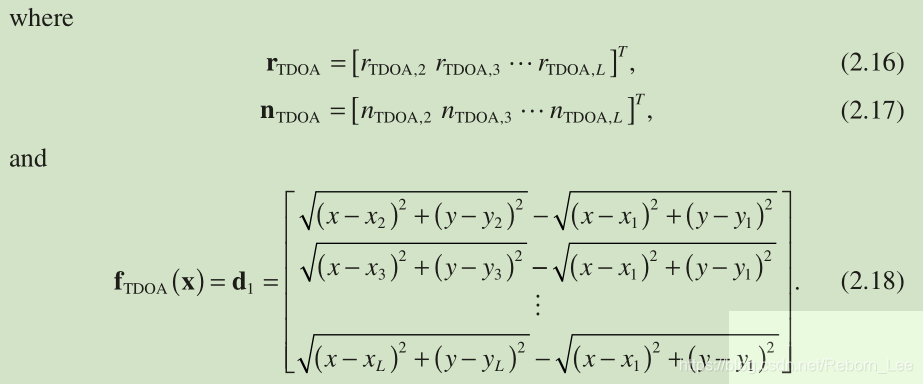
Thus, the range difference measurements deduced from the TDOAs are modeled as

where
![]()
and is the range difference error in
, which is proportional to the disturbance in
. Following the TOA , the TDOA signal model in matrix form is
![]()
The source localization problem based on TDOA measurements is to estimate x given { } or
.
Assuming that is zero - mean and Gaussian distributed, the PDF for
, denoted by
, is

where is the covariance matrix for
. Alternatively, we can write
. Since all TDOAs are determined with respect to the first sensor,
, are correlated. As a result,
is not a diagonal matrix [11] .