
嵌入式Linux-JZ2440-05課-中斷模式理解
阿新 • • 發佈:2018-11-23
大部分內容轉自 種菜大爺,在他的基礎上加一些自己不明白的地方註釋和修改,如有侵權,聯絡我,第一時間刪掉。
S3C2440的中斷分為兩大類: 外部中斷 和 內部中斷.
一 外部中斷
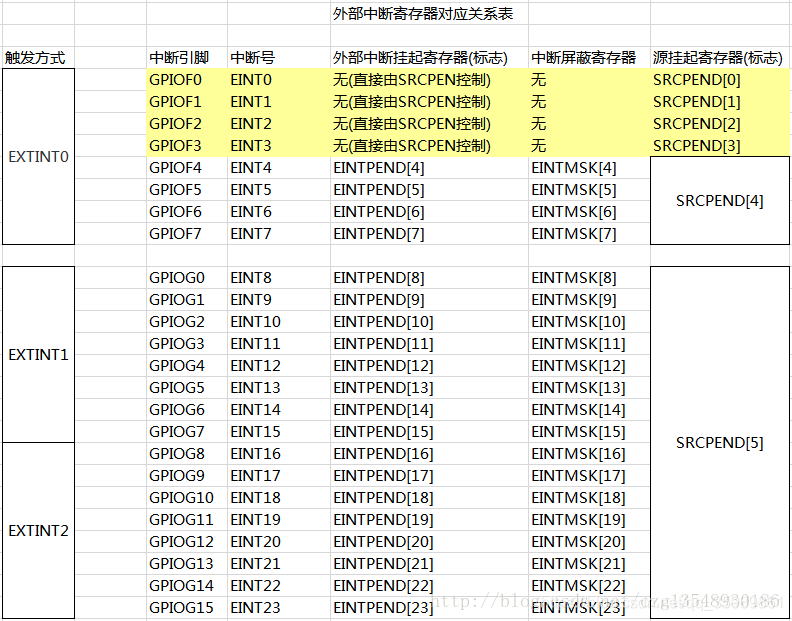
**EXTINT[x]: 用來配置各個引腳的中斷觸發方式 (高電平觸發、低電平觸發、下降沿觸發、上升沿觸發), 注意該暫存器與中斷源的對應關係
EINTPEND[x]: xxxPEND的暫存器都是狀態暫存器, 初始化時先清除標誌, 在清除中斷的時候將暫存器的值賦值給本身即可
EINTMASK[x]: 1 遮蔽中斷; 0 未遮蔽
SRCPND[x]: 1 申請中斷; 0 未申請中斷
EINTFLT0~EINTFLT3: 配置濾波時鐘和濾波寬度
INTMOD[x]: 1: FIQ, 0: IRQ
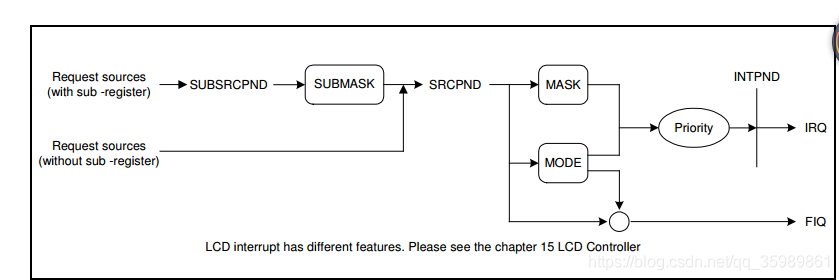
二 內部中斷
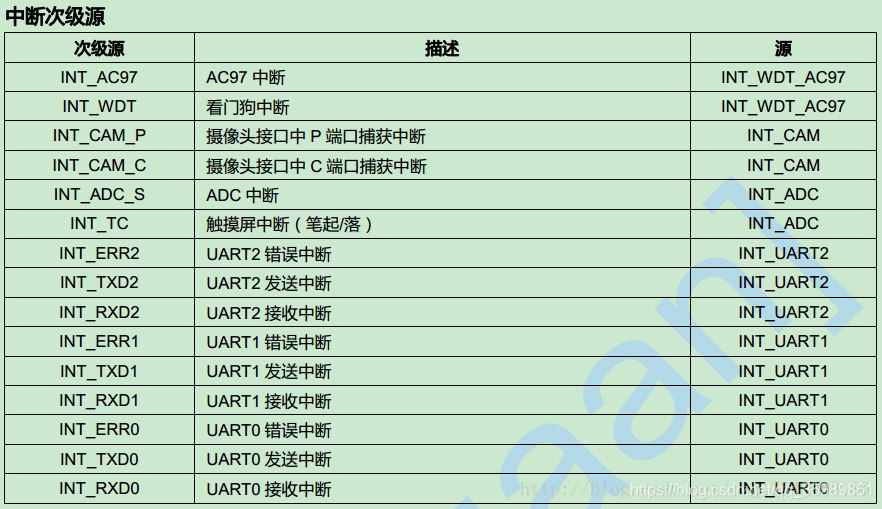
內部中斷分兩種: 帶子中斷的中斷 和 不帶子中斷的中斷
不帶子中斷(): 發生中斷後 SRCPEND置位, 如果沒有被 INTMSK遮蔽, 那麼繼續向下一步申請中斷
帶子中斷: 發生中斷之後, 先將 SUBSRCPEND 置位, 如果沒有INTSUBMSK遮蔽則向 SRCPEND申請中斷. 如果沒有被INTMSK遮蔽則進一步向下申請中斷
中斷的優先順序:
ARB_MODEx: 控制中斷優先順序是否輪轉
ARB_SELx: 控制輪轉順序
中斷的開啟(xxxMSK):
1 外部中斷: EINT4~23先初始化EINTMSK 和 INTMSK
2 內部中斷: 有子中斷先初始化 INTSUBMSK 再初始化 INTMSK, 如果是不帶子中斷的內部中斷直接初始化 INTMSK
中斷的清除(xxxPEND):
1 外部中斷: 如果是EINT4~23 先清除EINTPEND 再清除SRCPND、最後清除 INTPND (注意順序), 如果是 EINT0~3 先清除SRCPND.,然後清除 INTPND (不需要清除 EINTPEND)
2 內部中斷: 帶子中斷, 先清除 SUBSRCPND再清除SRCPND(注意順序); 不帶子中斷直接清除SRCPND
3 清除中斷是寫 1 清除
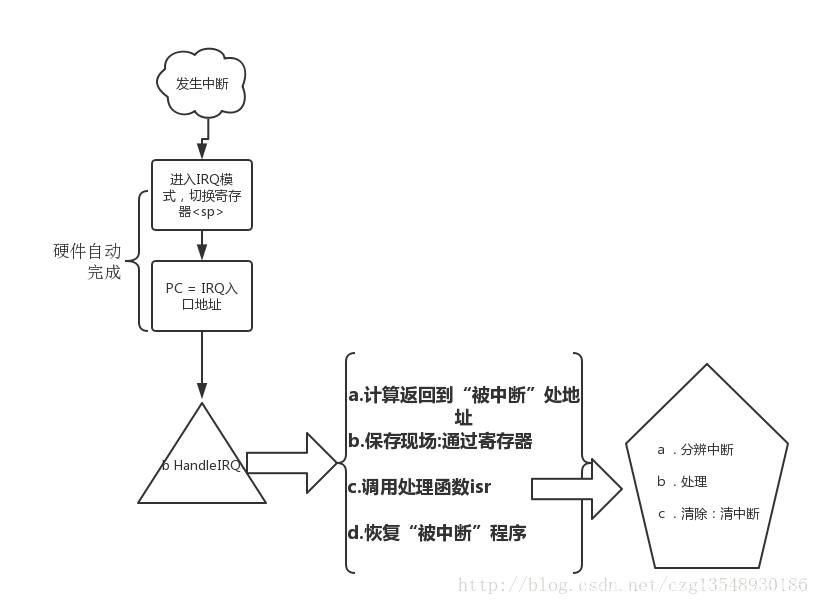
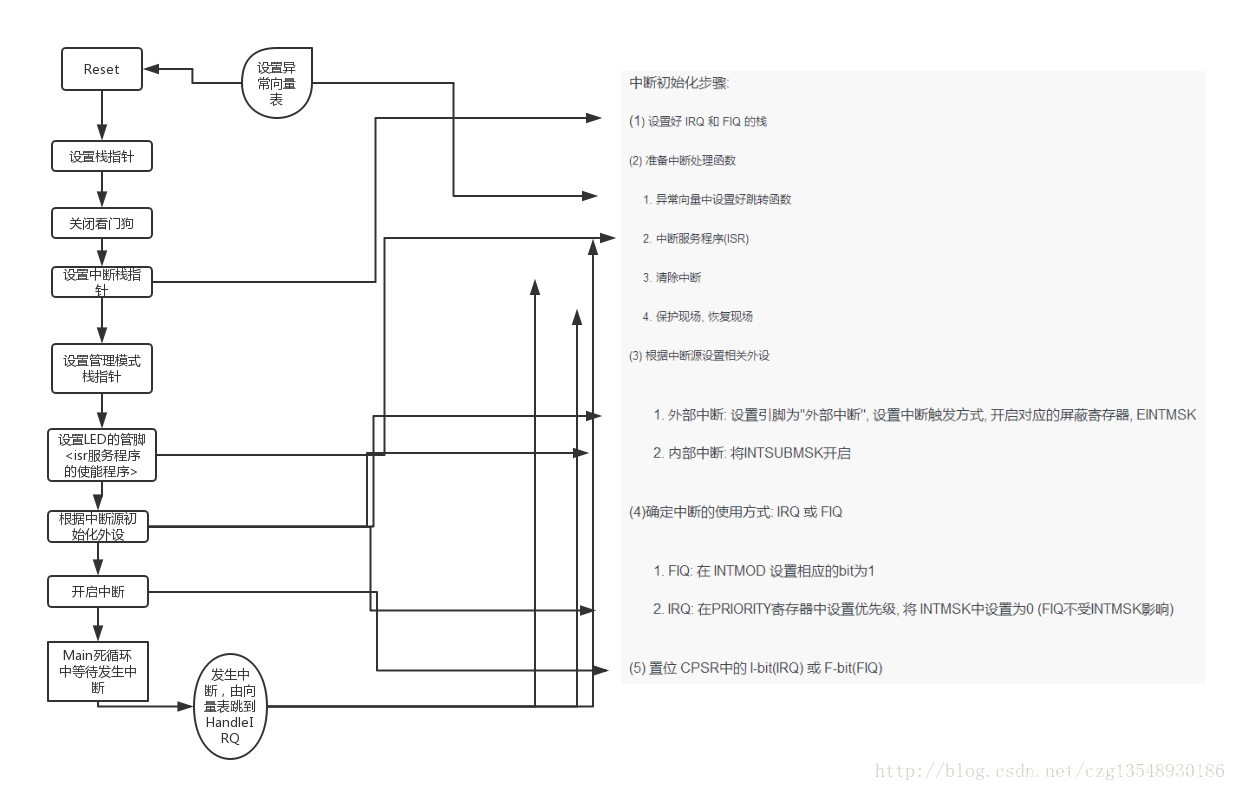
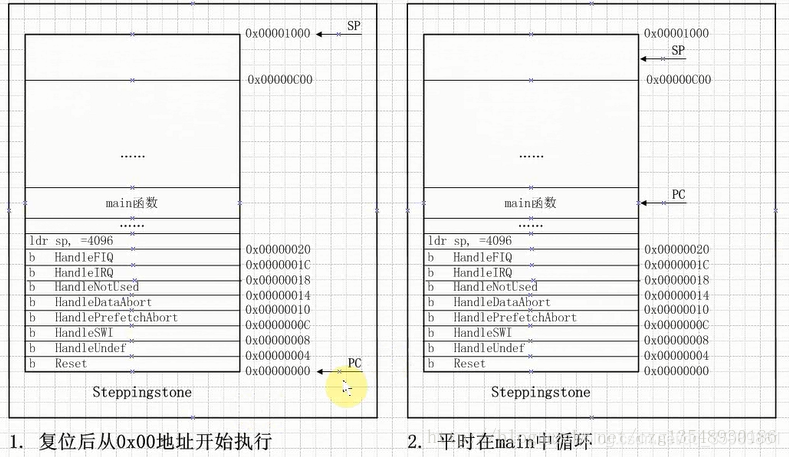
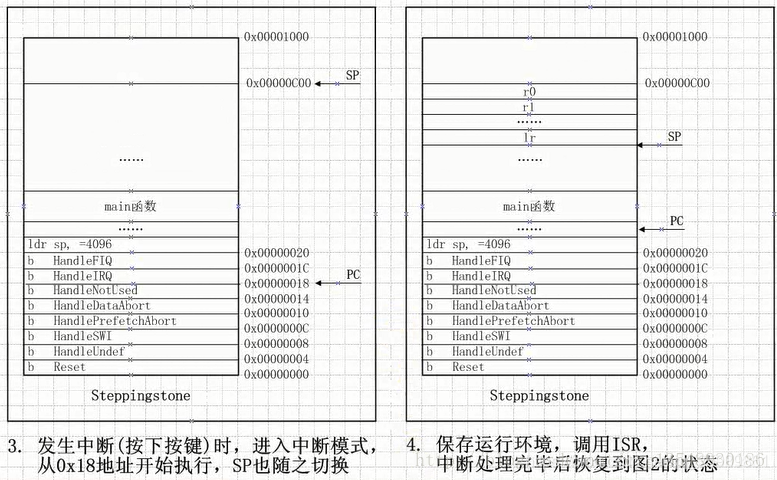
程式碼執行示意圖:
Makefile
objs := head.o init.o interrupt.o main.o
# $^ 代表所有的依賴檔案。 [email protected]目標檔案,$<--第一個依賴檔案。
int.bin: $(objs)
arm-linux-ld -Ttext 0x00000000 -o int_elf $^
arm-linux-objcopy -O binary -S int_elf [email protected] # binary:二進位制的 -S:不從原始檔複製重定位資訊和符號資訊到目標檔案中去
arm-linux-objdump -D -m arm int_elf > int.dis # -D:反彙編所有段 -m arm:指定反彙編檔案使用arm架構
%.o:%.c
arm-linux-gcc -Wall -O2 -c -o [email protected] $< #-Wall:開啟警告資訊 -O2:2級優化(常用) -c:只編譯不連線
%.o:%.S
arm-linux-gcc -Wall -O2 -c -o [email protected] $<
clean:
rm -f int.bin int_elf int.dis *.o
head.S
@******************************************************************************
@ File:head.S
@ 功能:初始化,設定中斷模式、管理模式的棧,設定好中斷處理函式
@******************************************************************************
.extern main
.text
.global _start
_start:
@******************************************************************************
@ 中斷向量,本程式中,除Reset和HandleIRQ外,其它異常都沒有使用
@******************************************************************************
b Reset
@ 0x04: 未定義指令中止模式的向量地址
HandleUndef:
b HandleUndef
@ 0x08: 管理模式的向量地址,通過SWI指令進入此模式
HandleSWI:
b HandleSWI
@ 0x0c: 指令預取終止導致的異常的向量地址
HandlePrefetchAbort:
b HandlePrefetchAbort
@ 0x10: 資料訪問終止導致的異常的向量地址
HandleDataAbort:
b HandleDataAbort
@ 0x14: 保留
HandleNotUsed:
b HandleNotUsed
@ 0x18: 中斷模式的向量地址
b HandleIRQ
@ 0x1c: 快中斷模式的向量地址
HandleFIQ:
b HandleFIQ
Reset:
ldr sp, =4096 @ 設定棧指標,以下都是C函式,呼叫前需要設好棧
bl disable_watch_dog @ 關閉WATCHDOG,否則CPU會不斷重啟
msr cpsr_c, #0xd2 @ 進入中斷模式
ldr sp, =3072 @ 設定中斷模式棧指標
msr cpsr_c, #0xd3 @ 進入管理模式
ldr sp, =4096 @ 設定管理模式棧指標,
@ 其實復位之後,CPU就處於管理模式,
@ 前面的“ldr sp, =4096”完成同樣的功能,此句可省略
bl init_led @ 初始化LED的GPIO管腳
bl init_irq @ 呼叫中斷初始化函式,在init.c中
msr cpsr_c, #0x5f @ 設定I-bit=0,開IRQ中斷
@計算了一下 這裡#0x5f時錯誤的,應該要改
#修改完程式碼 @ : msr cpsr_c, #0x53
ldr lr, =halt_loop @ 設定返回地址
ldr pc, =main @ 呼叫main函式
halt_loop:
b halt_loop
HandleIRQ:
sub lr, lr, #4 @ 計算返回地址
stmdb sp!, { r0-r12,lr } @ 儲存使用到的暫存器
@ 注意,此時的sp是中斷模式的sp
@ 初始值是上面設定的3072
@ 這個3072不是唯一的,設成別的也可以,保證這段空間不會被別的東西使用到就行***
@#stmdb sp!, { r0-r12,lr } #
@ 含義:sp = sp - 4,先壓lr,sp = lr(即將lr中的內容放入sp所指的記憶體地址)。sp = sp - 4,再壓r12,sp = r12。sp = sp - 4,再壓r11,sp = r11......sp = sp - 4,最後壓r0,sp = r0。
如果想要將r0-r12和lr彈出,可以用ldmia指令:
ldr lr, =int_return @ 設定呼叫ISR(即EINT_Handle函式)後的返回地址
ldr pc, =EINT_Handle @ 呼叫中斷服務函式,在interrupt.c中
int_return:
ldmia sp!, { r0-r12,pc }^ @ 中斷返回, ^表示將spsr的值複製到cpsr
@ 在這裡就用到了
@ ldmia用於將暫存器彈出棧,作用是儲存使用到的暫存器
init.c
/*
* init.c: 進行一些初始化
*/
#include "s3c24xx.h"
/*
* LED1,LED2,LED4對應GPF4、GPF5、GPF6
*/
#define GPF4_out (1<<(4*2))
#define GPF5_out (1<<(5*2))
#define GPF6_out (1<<(6*2))
#define GPF4_msk (3<<(4*2))
#define GPF5_msk (3<<(5*2))
#define GPF6_msk (3<<(6*2))
/*
* S2,S3,S4對應GPF0、GPF2、GPG3
*/
#define GPF0_eint (0x2<<(0*2))
#define GPF2_eint (0x2<<(2*2))
#define GPG3_eint (0x2<<(3*2))
#define GPF0_msk (3<<(0*2))
#define GPF2_msk (3<<(2*2))
#define GPG3_msk (3<<(3*2))
/*
* 關閉WATCHDOG,否則CPU會不斷重啟
*/
void disable_watch_dog(void)
{
WTCON = 0; // 關閉WATCHDOG很簡單,往這個暫存器寫0即可
}
void init_led(void)
{
// LED1,LED2,LED4對應的3根引腳設為輸出
GPFCON &= ~(GPF4_msk | GPF5_msk | GPF6_msk);
GPFCON |= GPF4_out | GPF5_out | GPF6_out;
}
/*
* 初始化GPIO引腳為外部中斷
* GPIO引腳用作外部中斷時,預設為低電平觸發、IRQ方式(不用設定INTMOD)
*/
void init_irq( )
{
// S2,S3對應的2根引腳設為中斷引腳 EINT0,ENT2
GPFCON &= ~(GPF0_msk | GPF2_msk);
GPFCON |= GPF0_eint | GPF2_eint;
// S4對應的引腳設為中斷引腳EINT11
GPGCON &= ~GPG3_msk;
GPGCON |= GPG3_eint;
// 對於EINT11,需要在EINTMASK暫存器中使能它
EINTMASK &= ~(1<<11);
/*
* 設定優先順序:
* ARB_SEL0 = 00b, ARB_MODE0 = 0: REQ1 > REQ3,即EINT0 > EINT2
* 仲裁器1、6無需設定
* 最終:
* EINT0 > EINT2 > EINT11即K2 > K3 > K4
*/
PRIORITY = (PRIORITY & ((~0x01) | (0x3<<7))) | (0x0 << 7) ;//PRIORITY = 0b001111110
// EINT0、EINT2、EINT8_23使能
INTMSK &= (~(1<<0)) & (~(1<<2)) & (~(1<<5));
}
main.c
int main()
{
while(1);
return 0;
}
interrupt.c
#include "s3c24xx.h"
void EINT_Handle()
{
unsigned long oft = INTOFFSET;
unsigned long val;
switch( oft )
{
// S2被按下
case 0:
{
GPFDAT |= (0x7<<4); // 所有LED熄滅
GPFDAT &= ~(1<<4); // LED1點亮
break;
}
// S3被按下
case 2:
{
GPFDAT |= (0x7<<4); // 所有LED熄滅
GPFDAT &= ~(1<<5); // LED2點亮
break;
}
// K4被按下
case 5:
{
GPFDAT |= (0x7<<4); // 所有LED熄滅
GPFDAT &= ~(1<<6); // LED4點亮
break;
}
default:
break;
}
//清中斷
if( oft == 5 )
EINTPEND = (1<<11); // EINT8_23合用IRQ5
SRCPND = 1<<oft;
INTPND = 1<<oft;
}
s3c24xx.h
/* WOTCH DOG register */
#define WTCON (*(volatile unsigned long *)0x53000000)
/* SDRAM regisers */
#define MEM_CTL_BASE 0x48000000
#define SDRAM_BASE 0x30000000
/* NAND Flash registers */
#define NFCONF (*(volatile unsigned int *)0x4e000000)
#define NFCMD (*(volatile unsigned char *)0x4e000004)
#define NFADDR (*(volatile unsigned char *)0x4e000008)
#define NFDATA (*(volatile unsigned char *)0x4e00000c)
#define NFSTAT (*(volatile unsigned char *)0x4e000010)
/*GPIO registers*/
#define GPBCON (*(volatile unsigned long *)0x56000010)
#define GPBDAT (*(volatile unsigned long *)0x56000014)
#define GPFCON (*(volatile unsigned long *)0x56000050)
#define GPFDAT (*(volatile unsigned long *)0x56000054)
#define GPFUP (*(volatile unsigned long *)0x56000058)
#define GPGCON (*(volatile unsigned long *)0x56000060)
#define GPGDAT (*(volatile unsigned long *)0x56000064)
#define GPGUP (*(volatile unsigned long *)0x56000068)
#define GPHCON (*(volatile unsigned long *)0x56000070)
#define GPHDAT (*(volatile unsigned long *)0x56000074)
#define GPHUP (*(volatile unsigned long *)0x56000078)
/*UART registers*/
#define ULCON0 (*(volatile unsigned long *)0x50000000)
#define UCON0 (*(volatile unsigned long *)0x50000004)
#define UFCON0 (*(volatile unsigned long *)0x50000008)
#define UMCON0 (*(volatile unsigned long *)0x5000000c)
#define UTRSTAT0 (*(volatile unsigned long *)0x50000010)
#define UTXH0 (*(volatile unsigned char *)0x50000020)
#define URXH0 (*(volatile unsigned char *)0x50000024)
#define UBRDIV0 (*(volatile unsigned long *)0x50000028)
/*interrupt registes*/
#define SRCPND (*(volatile unsigned long *)0x4A000000)
#define INTMOD (*(volatile unsigned long *)0x4A000004)
#define INTMSK (*(volatile unsigned long *)0x4A000008)
#define PRIORITY (*(volatile unsigned long *)0x4A00000c)
#define INTPND (*(volatile unsigned long *)0x4A000010)
#define INTOFFSET (*(volatile unsigned long *)0x4A000014)
#define SUBSRCPND (*(volatile unsigned long *)0x4A000018)
#define INTSUBMSK (*(volatile unsigned long *)0x4A00001c)
/*external interrupt registers*/
#define EINTMASK (*(volatile unsigned long *)0x560000a4)
#define EINTPEND (*(volatile unsigned long *)0x560000a8)
作者:種瓜大爺
來源:CSDN
原文:https://blog.csdn.net/czg13548930186/article/details/75337988
版權宣告:本文為博主原創文章,轉載請附上博文連結!