
Opencv之cv2.minAreaRect
阿新 • • 發佈:2018-11-25
目錄
一、cv2.minAreaRect函式原型
cv2.minAreaRect(Points)
其中points是點集,資料型別為ndarray,array((x1,y1),(x2,y2),....,(xn,yn))
而minAreaRect就是求出在上述點集下的最小面積矩形
eg.
二、minAreaRect函式返回rect物件
① rect[0]返回矩形的中心點
利用:cv2.boxPoints(rect)可以返回四個點的值,其中cv2.boxPoints(rect)[0]為point[0],cv2.boxPoints(rect)[1]為point[1]......

② rect[1]返回矩形的長和寬,順序一定不要弄錯了,在旋轉角度上有很重要的作用
③ rect[2]返回矩形的旋轉角度
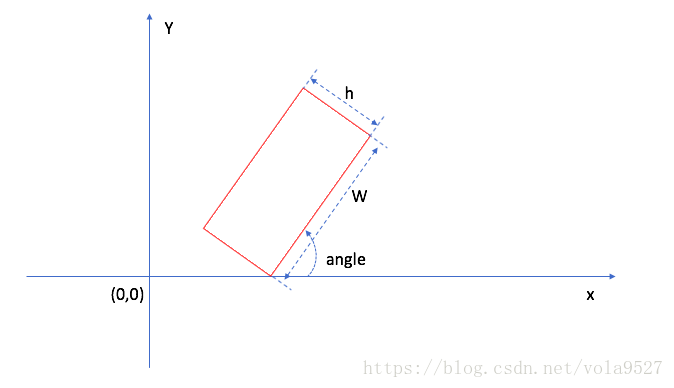
angel是由x軸逆時針轉至W(寬)的角度。
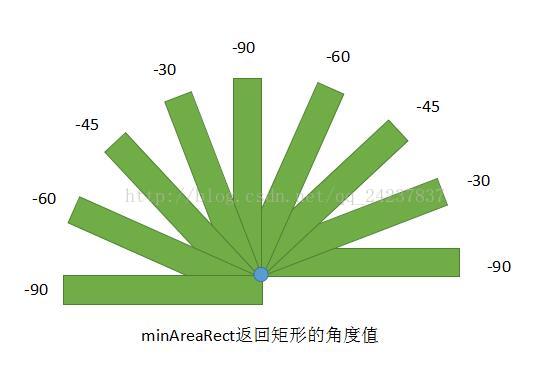
角度範圍是[-90,0)