
Python-OpenCV運動物體檢測
阿新 • • 發佈:2018-11-27
運動物體檢查,在移動目標定位和智慧安防系統中有廣泛的應用,它的實現原理:捕獲連續幀之間的變化情況,將每次捕獲的影象進行對比,然後檢查差值影象中的所有斑塊(顏色相近的地方)。
Demo在實現的過程中,首先需要設定“背景幀”,通過捕獲連續幀,比較“背景幀”與其它幀之間的差異,這種方法檢測結果還是挺不錯的,但是若在室外,光線的變化就會引起誤檢測,具有侷限性和干擾性。
Demo執行效果如下:
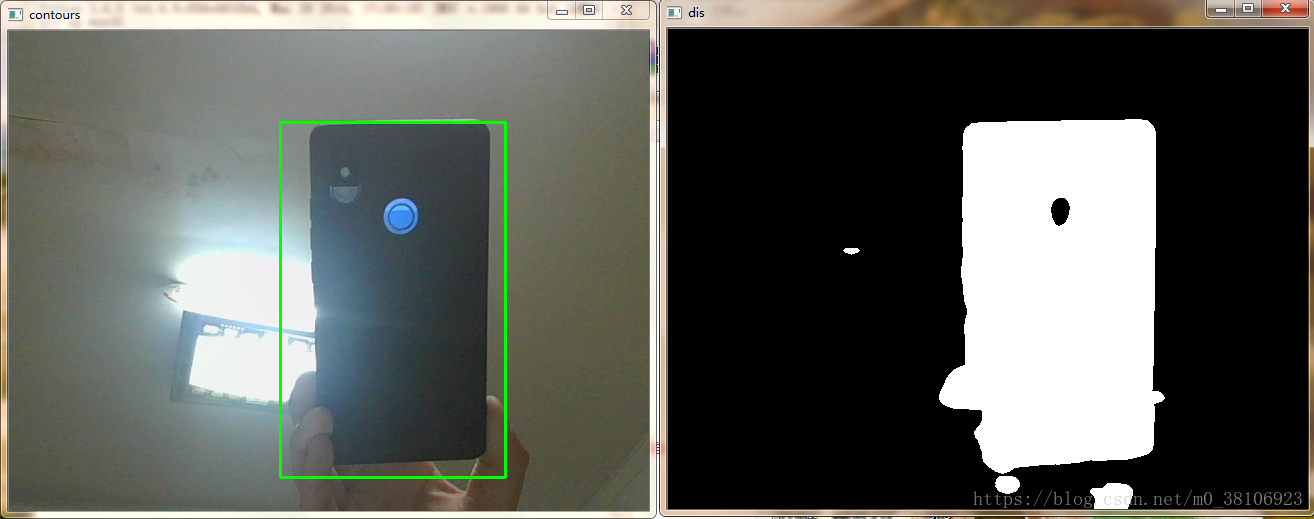
Demo實現如下:
import cv2 import numpy as np camera = cv2.VideoCapture(0) # 引數0表示第一個攝像頭 # 判斷視訊是否開啟 if (camera.isOpened()): print('Open') else: print('攝像頭未開啟') # 測試用,檢視視訊size size = (int(camera.get(cv2.CAP_PROP_FRAME_WIDTH)), int(camera.get(cv2.CAP_PROP_FRAME_HEIGHT))) print('size:'+repr(size)) es = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (9, 4)) kernel = np.ones((5, 5), np.uint8) background = None while True: # 讀取視訊流 grabbed, frame_lwpCV = camera.read() # 對幀進行預處理,先轉灰度圖,再進行高斯濾波。 # 用高斯濾波進行模糊處理,進行處理的原因:每個輸入的視訊都會因自然震動、光照變化或者攝像頭本身等原因而產生噪聲。對噪聲進行平滑是為了避免在運動和跟蹤時將其檢測出來。 gray_lwpCV = cv2.cvtColor(frame_lwpCV, cv2.COLOR_BGR2GRAY) gray_lwpCV = cv2.GaussianBlur(gray_lwpCV, (21, 21), 0) # 將第一幀設定為整個輸入的背景 if background is None: background = gray_lwpCV continue # 對於每個從背景之後讀取的幀都會計算其與背景之間的差異,並得到一個差分圖(different map)。 # 還需要應用閾值來得到一幅黑白影象,並通過下面程式碼來膨脹(dilate)影象,從而對孔(hole)和缺陷(imperfection)進行歸一化處理 diff = cv2.absdiff(background, gray_lwpCV) diff = cv2.threshold(diff, 25, 255, cv2.THRESH_BINARY)[1] # 二值化閾值處理 diff = cv2.dilate(diff, es, iterations=2) # 形態學膨脹 # 顯示矩形框 image, contours, hierarchy = cv2.findContours(diff.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) # 該函式計算一幅影象中目標的輪廓 for c in contours: if cv2.contourArea(c) < 1500: # 對於矩形區域,只顯示大於給定閾值的輪廓,所以一些微小的變化不會顯示。對於光照不變和噪聲低的攝像頭可不設定輪廓最小尺寸的閾值 continue (x, y, w, h) = cv2.boundingRect(c) # 該函式計算矩形的邊界框 cv2.rectangle(frame_lwpCV, (x, y), (x+w, y+h), (0, 255, 0), 2) cv2.imshow('contours', frame_lwpCV) cv2.imshow('dis', diff) key = cv2.waitKey(1) & 0xFF # 按'q'健退出迴圈 if key == ord('q'): break # When everything done, release the capture camera.release() cv2.destroyAllWindows()