
想了解自動駕駛系統,看完這一篇就夠了......
來源 | 智駕未來
原創 | Alvin
(-自動駕駛系統 可理解成一種 移動機器人系統-)
“熱炒”的自動駕駛走進了現實,也靠近了未來!
“長城汽車預計於2020年實現部分自動駕駛功能,到2025年實現Level5級自動駕駛。”長城汽車總裁王鳳英曾表示。
科技迭代很快,如果需要將概念中Level 5級別的自動駕駛形象化,那麼它就是一臺擁有人類感知、決策以及控制的代步機器。精細劃分來看,實現一個自動駕駛系統,需要分為感知層、資訊融合層、決策規劃層、以及控制層。
1 感知層
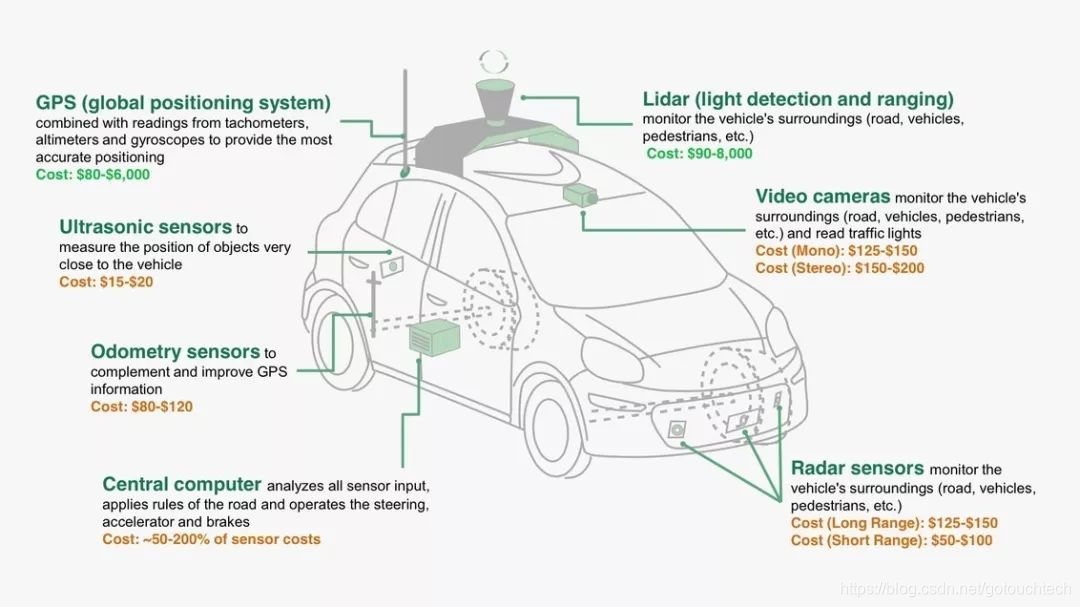
感知,其實很好理解,人類用眼睛捕捉事物,自動駕駛汽車則需要感測器感知事物。自動駕駛汽車想要安全行駛,首先需要了解周圍行駛的環境,而感測器就是自動駕駛汽車瞭解環境的工具,目前自動駕駛汽車搭載的主要感測器包括攝像頭、鐳射雷達、毫米波雷達以及超聲波雷達等四大部分。
目前,攝像頭普遍採用CMOS影象感測器,捕捉清晰圖片幫助自動駕駛汽車輸入資料引數。為了保證資料完整性,市面上的很多自動駕駛汽車都會採用3-6個攝像頭。由於攝像頭對於光線極為敏感,如果出現強、弱光的情況,普通攝像頭捕捉的影象並不能直接被使用,或者會出現無法識別的現象,這對於自動駕駛汽車來說極為致命。所以,市面上自動駕駛汽車一般都會採用動態範圍130db以上的影象感測器。
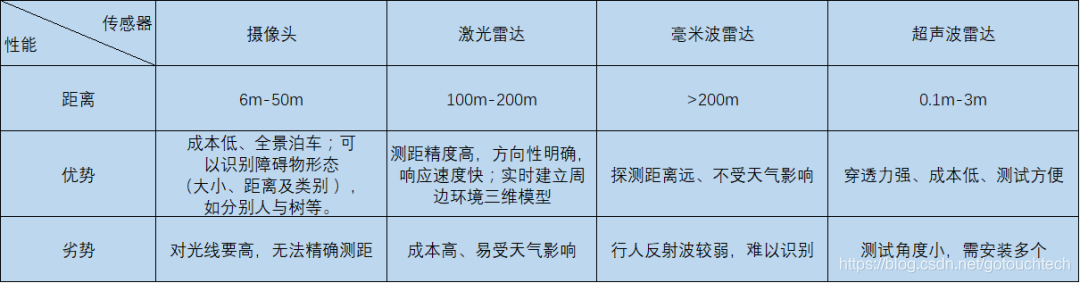
四大感測器優勢對比
雷達主要測量位置、速度以及方位角等三個引數。鐳射雷達算是汽車行業裡的一個新貴,也被視為自動駕駛汽車未來最核心感測器之一。其主要通過傳送直線鐳射束(非無線電波)的方式,根據鐳射遇到障礙物後折返時間(TOF),計算目標與車的距離。鐳射雷達在精度、資訊量以及安全性效能方面,具有獨到之處。
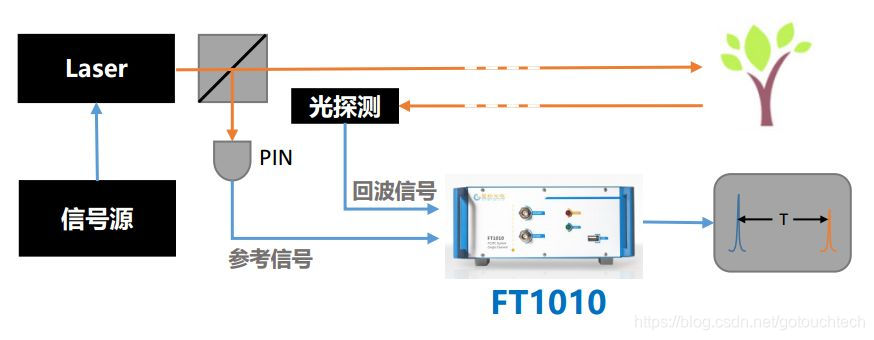
圖片來源:星秒光電
毫米波雷達,顧名思義是工作在毫米波波段(波長1-10mm,頻率30GHZ-300GHZ)的探測雷達,與鐳射雷達傳送方式不同的是,毫米波雷達會發出錐狀的電磁波。工作原理是根據回波時間差計算距離,其具有不受天氣情況影響及超遠測距的優勢,雷達頻段與測距成正相關,目前市面上主流有24GHZ和77GHZ兩種,隨著技術水平提升以及成本下降,此感測器逐漸被應用於ADAS。
圖片來源:wired
蝙蝠發出超聲波探測物體的遠近,自動駕駛汽車用超聲波發現障礙物,兩者原理一樣。超聲波屬於機械波的一種,所以容易受傳播介質的影響,如天氣不同,傳播速度不同。故為了充分利用超聲波雷達穿透力強、測距方便以及成本低的優點,部分車企會在汽車車身四周置入大量的超聲波雷達,如L2-L3級的特斯拉、奧迪等汽車中超聲波雷達使用數量達高達12個。
2 資訊融合層
資訊融合層則比較關鍵,怎麼理解呢?自動駕駛汽車置入瞭如攝像頭、鐳射雷達、毫米波雷達等多個感測器,我們需要用這些感測器感知、捕獲資料。當汽車行駛至目標物一定距離內,攝像頭和鐳射雷達同時檢測出那個目標物,但如何讓汽車知道兩個感測器檢測出的目標物是同一個呢?這便需要對多感測器資料進行分析對比,如果相同,則進行資訊融合,告訴汽車前面就是一個目標物。

仔細想想,這其實是一個數據處理的過程,而且當資料量比較大的時候,資訊融合時延還會加長。而且極為尷尬的是,如果汽車正在前進,前方目標物靜止,那麼從傳送探測波到探測波返回,這其中汽車在探測時間內行駛的距離並沒有算入到實際距離中。所以,在計算時延的時候,需要考慮到汽車在時延過程中的速度、以及系統發出與收到測試資料前後的時間差。
此外,頻率的傳送也會受環境的影響,如高低溫環境,所面臨的處理效能則可能不同。頻率不同也會導致時延不同,所以在計算過程中,我們用初始(額定)頻率去計算時延時,也會出現一定的誤差。
對於自動駕駛汽車而言,時間意味著安全,如果1s計算錯誤,對於高速執行的汽車而言,都會產生致命的結果。
3 決策規劃層
決策規劃層,其實也不難理解,即對融合的資料,根據駕駛需求,進行任務規劃以及決策。對於這點,業界看法比較多,目前只介紹兩種比較巨集觀的看法。
其一,全域性規劃;這種方式需要藉助於地圖資訊,按照乘客的需求,選擇最優的路徑。
其二,區域性規劃;需要自動駕駛汽車根據基於全域性規劃的基礎,針對區域性環境資訊,規劃最優的路線。
這個概念就相當於框架一樣,需要自動駕駛汽車能夠提前基於大資料對行程進行規劃,這也是判斷自動駕駛系統智慧性的重要指標之一。

4 控制層
經常開車的朋友都知道,現在的汽車基本都需要我們人為操作,而自動駕駛汽車控制層便是替代人為操作,根據獲取的資訊資料,將做出的決策規劃落到實處,即實時操作。用簡潔語言描述,便是自動開車。這需要車輛的控制系統與決策系統相配合,並且能夠精確的按照需求,對汽車做出加速、減速、制動、轉向、變道以及超車等操作。
可以看出,前面介紹的感知層、資訊融合層以及決策規劃層其實都是為控制層做鋪墊,最終需要做出動作的還是控制層。
5 總結
說了這麼多,其實自動駕駛就是將人為開車的過程用硬體、軟體技術體現了出來,實現了某些過程替代人或者完全自動駕駛的目標。
對於老司機而言,開車過程中,身體與車的配合極為自然,自動駕駛其實也是一樣,只不過它所有的資訊獲取以及判斷不是通過眼睛、人腦獲得、決策,而是通過汽車自身的“眼睛”、“大腦”,解放了司機。
當然,自動駕駛概念好理解,其中的實現難度可不小!正如汽車高德事業部總裁韋東所言,從普通的導航走向半自動輔助駕駛,更高自動化的輔助駕駛,再走向自動化,再走向完全自動駕駛,一定是一步一步的。