openMV使用---找到影象中的圓形
阿新 • • 發佈:2018-12-02
主要想實現一個功能,就是找到影象中固定大小的圓形,然後將其標記出來。
openmv給的示例程式中有相關程式,今天主要對該程式進行講解,並改進。
import sensor, image, time sensor.reset()#重啟攝像頭 #設定為彩色, 顏色格式為RGB565 # 也就是說,顏色儲存 紅色(5位),綠色(6位), 藍色(5位) # sensor.GRAYSCALE: 灰度,每個畫素8位。 sensor.set_pixformat(sensor.RGB565) # grayscale is faster #設定影象的大小 #就是你拍攝的畫面的長和寬分別是多少個畫素點 #sensor.QQQQCIF: 22x18 #sensor.QQQCIF: 44x36 #sensor.QQCIF: 88x72 #sensor.QCIF: 176x144 #sensor.CIF: 352x288 #sensor.QQQQSIF: 22x15 #sensor.QQQSIF: 44x30 #sensor.QQSIF: 88x60 #sensor.QSIF: 176x120 #sensor.SIF: 352x240 #sensor.QQQQVGA: 40x30 #sensor.QQQVGA: 80x60 #sensor.QQVGA: 160x120 #sensor.QVGA: 320x240 #sensor.VGA: 640x480 #sensor.HQQQQVGA: 40x20 #sensor.HQQQVGA: 80x40 #sensor.HQQVGA: 160x80 #sensor.HQVGA: 240x160 #sensor.HVGA: 480x320 #sensor.LCD: 128x160 (for use with the lcd shield) #sensor.QQVGA2: 128x160 (for use with the lcd shield) #sensor.B40x30: 160x120 (for use with image.find_displacement) #sensor.B64x32: 160x120 (for use with image.find_displacement) #sensor.B64x64: 160x120 (for use with image.find_displacement) #sensor.SVGA: 800x600 (only in JPEG mode for the OV2640 sensor) #sensor.SXGA: 1280x1024 (only in JPEG mode for the OV2640 sensor) #sensor.UXGA: 1600x1200 (only in JPEG mode for the OV2640 sensor) sensor.set_framesize(sensor.QQVGA)#表示拍攝畫面的大小為160×120畫素 #因為sensor引數設定之後, 影象質量不穩定, 要過一段時間。 跳過n張照片,在更改 #設定後,跳過一些幀,等待感光元件變穩定。這裡是跳過2000毫秒 sensor.skip_frames(time = 2000) #建立一個時鐘物件來追蹤FPS #FPS是測量用於儲存、顯示動態視訊的資訊數量。通俗來講就是指每秒變化的畫面數。 clock = time.clock() while(True): clock.tick() #每次迴圈更新時鐘 # 拍攝一張照片,snapshot()函式返回一個image物件 #lens_corr函式用於非魚眼畸變矯正,預設設定引數為1.8, #然後根據影象情況進行調整 img = sensor.snapshot().lens_corr(1.8) # threshold:設定要找到圓的個數,閾值越大,表示要找的圓越少 #`x_margin`, `y_margin`, and `r_margin`:控制相似圓的合併,就是說多大範圍的圓, #將其認為是同一個圓。 #r_min, r_max, and r_step:控制圓的大小範圍,就是說我想找半徑在這個範圍內的圓 for c in img.find_circles(threshold = 2000, x_margin = 10, y_margin = 10, r_margin = 10, r_min = 2, r_max = 100, r_step = 2): img.draw_circle(c.x(), c.y(), c.r(), color = (255, 0, 0)) print(c) print("FPS %f" % clock.fps())
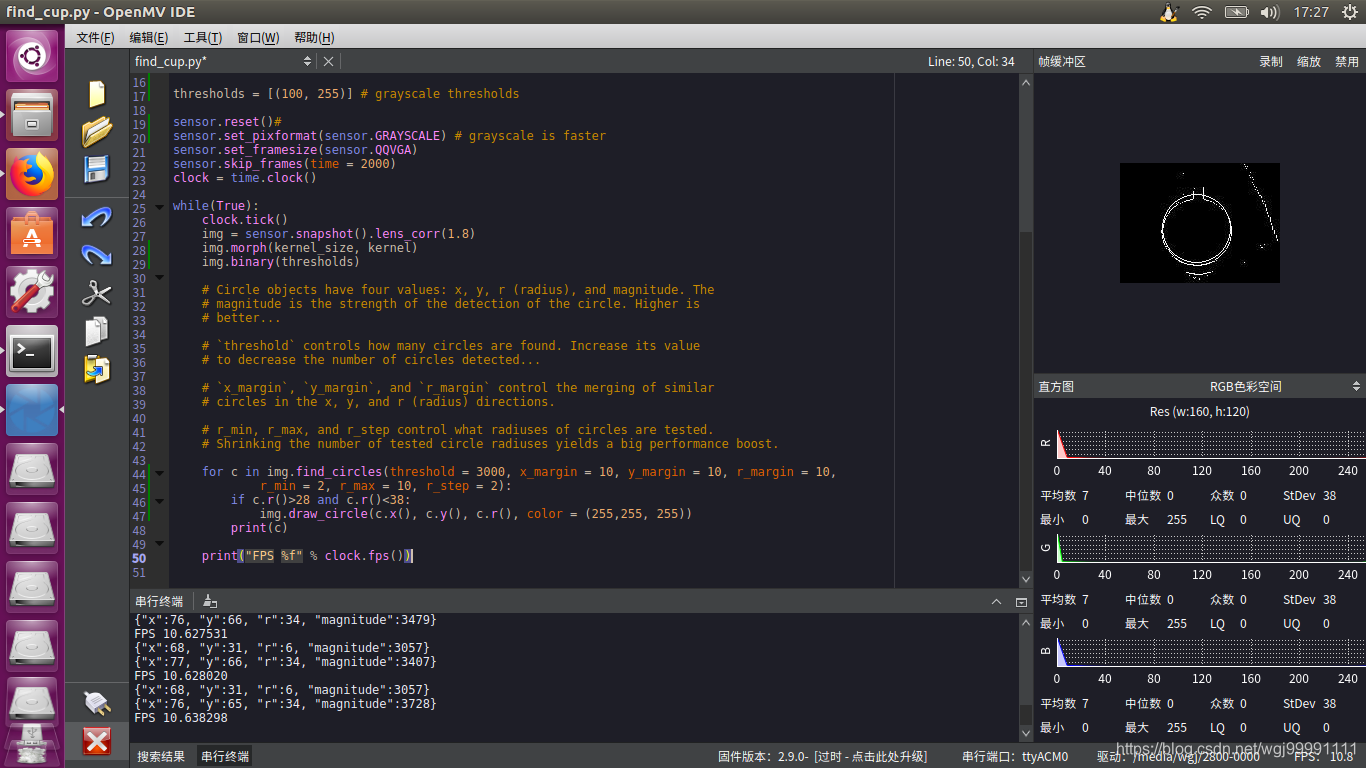
以上程式碼效果不是很好,新增邊緣增強濾波,以及使用灰度影象之後,效果好很多。
import sensor, image, time kernel_size = 1 # kernel width = (size*2)+1, kernel height = (size*2)+1 kernel = [-1, -1, -1,\ -1, +8, -1,\ -1, -1, -1] thresholds = [(100, 255)] # grayscale thresholds sensor.reset()# sensor.set_pixformat(sensor.GRAYSCALE) # grayscale is faster sensor.set_framesize(sensor.QQVGA) sensor.skip_frames(time = 2000) clock = time.clock() while(True): clock.tick() img = sensor.snapshot().lens_corr(1.8) img.morph(kernel_size, kernel) img.binary(thresholds) # Circle objects have four values: x, y, r (radius), and magnitude. The # magnitude is the strength of the detection of the circle. Higher is # better... # `threshold` controls how many circles are found. Increase its value # to decrease the number of circles detected... # `x_margin`, `y_margin`, and `r_margin` control the merging of similar # circles in the x, y, and r (radius) directions. # r_min, r_max, and r_step control what radiuses of circles are tested. # Shrinking the number of tested circle radiuses yields a big performance boost. for c in img.find_circles(threshold = 3000, x_margin = 10, y_margin = 10, r_margin = 10, r_min = 2, r_max = 10, r_step = 2): if c.r()>28 and c.r()<38: img.draw_circle(c.x(), c.y(), c.r(), color = (255,255, 255)) print(c) print("FPS %f" % clock.fps())