
二分圖最大匹配 匈牙利演算法的簡單理解
阿新 • • 發佈:2018-12-06
(本文圖片及被*標註內容來自CSDN部落格:pi9nc)
基本概念—二分圖
二分圖:是圖論中的一種特殊模型。若能將無向圖G=(V,E)的頂點V劃分為兩個交集為空的頂點集,並且任意邊的兩個端點都分屬於兩個集合,則稱圖G為一個為二分圖。
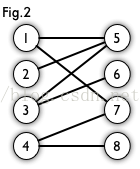
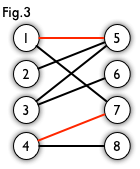
匹配:一個匹配即一個包含若干條邊的集合,且其中任意兩條邊沒有公共端點。如下圖,圖3的紅邊即為圖2的一個匹配。
匹配邊/匹配點:包含在匹配中的邊及其端點。
非匹配邊/非匹配點:不包含在匹配中的邊及其端點。
最大匹配:所含邊數最多的匹配稱為最大匹配。*
基本概念—匈牙利演算法
交替路:從一個未匹配點出發,依次經過非匹配邊、匹配邊、非匹配邊...形成的路徑叫交替路。*
增廣路:從一個未匹配點出發,走交替路,如果途徑另一個未匹配點(出發的點不算),則這條交替路稱為增廣路(agumenting path)。
匈牙利演算法
由增廣路的性質,增廣路中的匹配邊總是比未匹配邊多一條,所以如果我們放棄一條增廣路中的匹配邊,選取未匹配邊作為匹配邊,則匹配的數量就會增加。匈牙利演算法就是在不斷尋找增廣路,如果找不到增廣路,就說明達到了最大匹配。
演算法模板(鄰接表 & C++)
#include<iostream> using namespace std; const int N=20000,M=20000; struct edge{int u,v; edge *next;}e[M],*P=e,*point[N]; int Link[N],used[N],n,m; inline void add_edge(int u,int v) { ++P; P->u = u; P->v = v; P->next = point[u]; point[u] = P; } bool dfs(int u) { for(edge *j=point[u];j;j=j->next) { if(used[j->v]) continue; used[j->v]=true; if(Link[j->v]==0 || dfs(Link[j->v])) { Link[j->v]=u; return true; } } return false; } int main() { //讀入資料 memset(Link,0,sizeof(Link)); int cnt=0; for(int i=1;i<=n;i++) { memset(used,0,sizeof(used)); if(dfs(i)) cnt++; } cout<<cnt<<endl; }