
目標檢測YOLO演算法-學習筆記
演算法發展及對比:
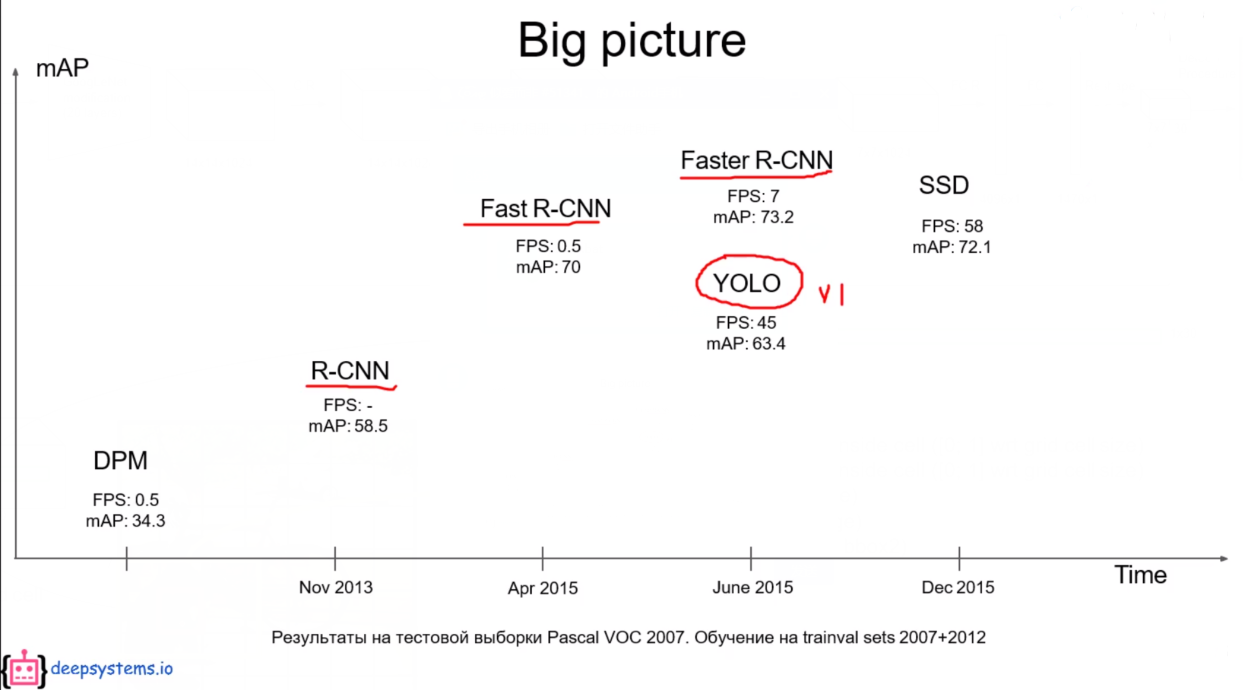
YOLO
YOLO最大的優勢就是快
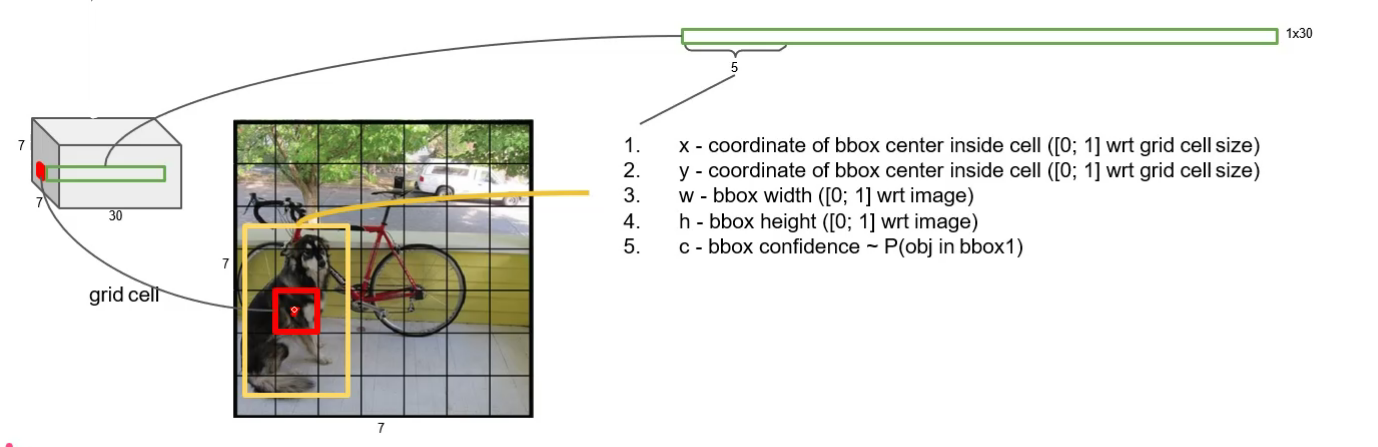
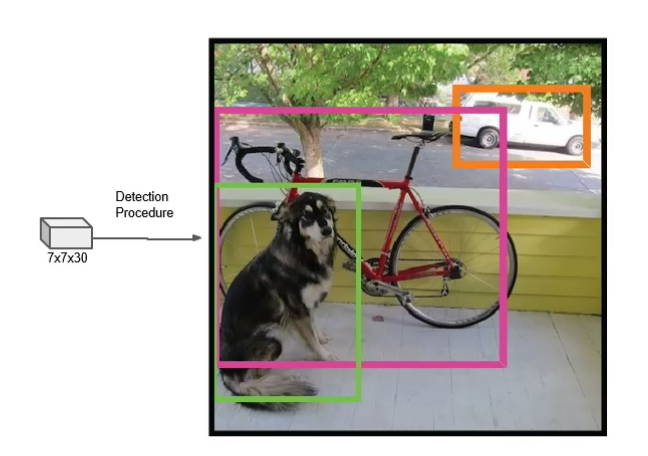
原論文中流程,可以檢測出20類物體.

紅色網格-張量,在這樣一個1×30的張量中儲存的資料

橫縱座標中心點縮放到0-1之間
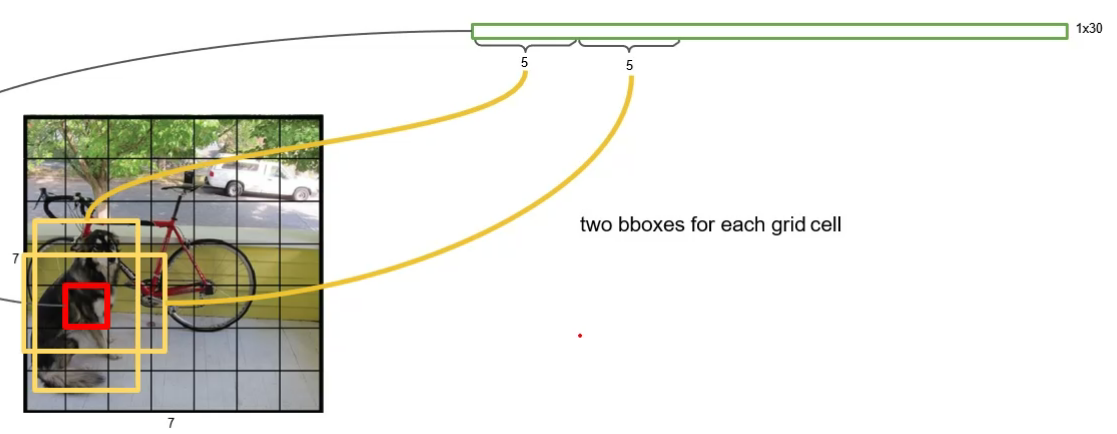
每一個小網格矩形對應兩個不同尺寸比例的物體:豎條,長條
bb1和bb2,兩個box 分別儲存中心點座標,寬度,高度,置信度
張量後20為,認為其是某一類的當前概率值,置信

後20:是20個之中的哪一類,打個分.

bb1和bb2中也有個置信度,是其box中是否有物體的置信度.(待定)
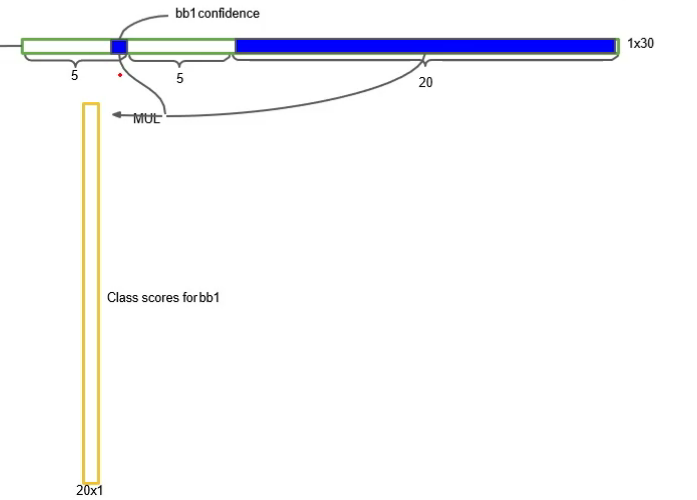
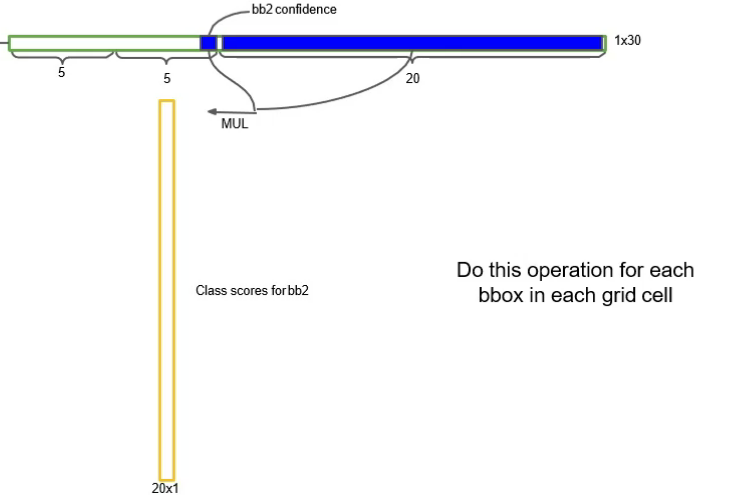
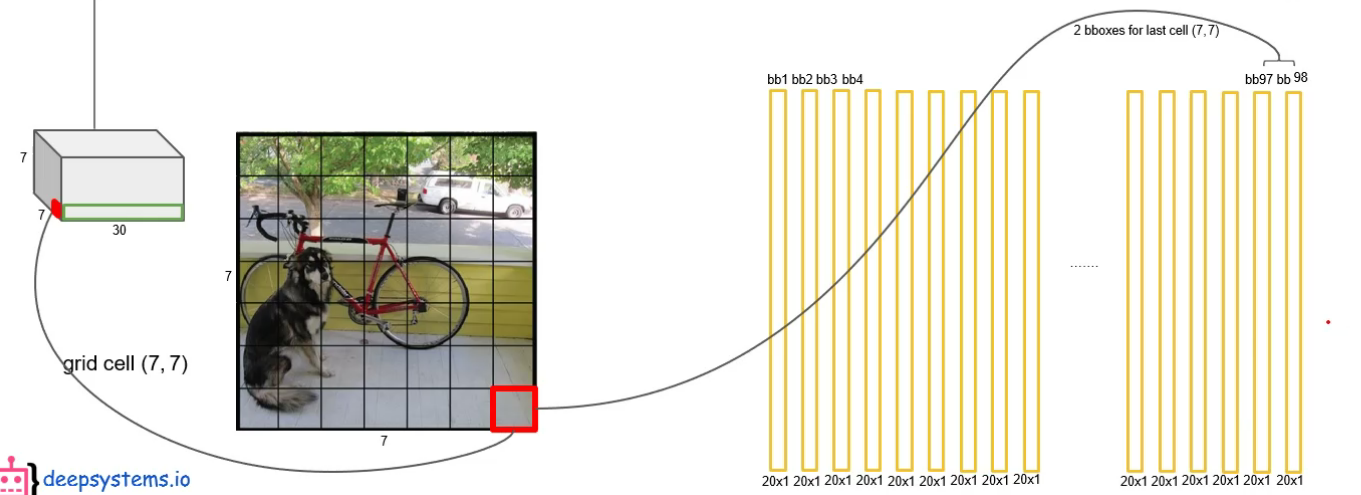
迴圈遍歷7*7=49個網格grid cell,每個網格兩種矩形去預測bb1和bb2,存是不是物體*物體哪一類,兩個值相乘:
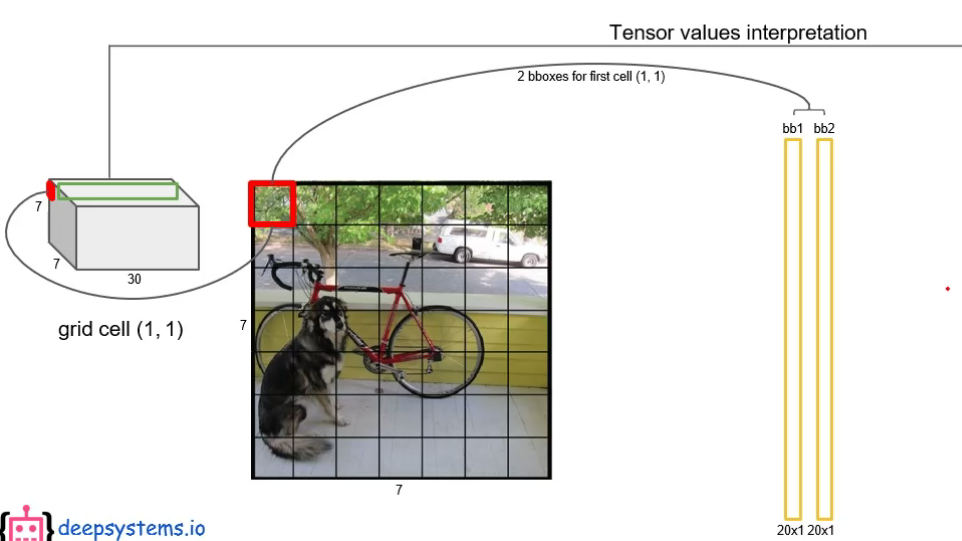
共7*7=49,*2=98個
檢測過程
相關推薦
目標檢測YOLO演算法-學習筆記
演算法發展及對比: YOLO YOLO最大的優勢就是快 原論文中流程,可以檢測出20類物體. 紅色網格-張量,在這樣一個1×30的張量中儲存的資料 橫縱座標中心點縮放到0-1之間 每一個小網格矩形對應兩個不同尺寸比例的物體:豎
OpenCV學習筆記(二十六)——小試SVM演算法ml OpenCV學習筆記(二十七)——基於級聯分類器的目標檢測objdect OpenCV學習筆記(二十八)——光流法對運動目標跟蹤Video Ope
OpenCV學習筆記(二十六)——小試SVM演算法ml 總感覺自己停留在碼農的初級階段,要想更上一層,就得靜下心來,好好研究一下演算法的東西。OpenCV作為一個計算機視覺的開源庫,肯定不會只停留在數字影象處理的初級階段,我也得加油,深入研究它的演算法庫。就從ml入手
影象目標檢測與跟蹤學習筆記(五)
作者跟蹤的實現過程中,作者定義了兩個correlation filter,一個濾波器(translation filter)專門用於確定新的目標所處的位置,另一個濾波器(scale filter)專門用於尺度評估。在translation filter方面,作者的方法與MOSSE的方法是一樣的
【深度學習:目標檢測】RCNN學習筆記(5):faster rcnn
轉載:http://blog.csdn.net/u011534057/article/details/51247371 reference link:http://blog.csdn.net/shenxiaolu1984/article/details/51152614
影象目標檢測與跟蹤學習筆記(一)
一. 講座心得 劉洋師兄的講座深入淺出,用通俗的語言給我們介紹了Computer Vision這個領域的相關知識。 開篇先介紹了幾個很有意思的應用,印象最深刻的是速度與激情的視訊,能夠在如此快的速度下精確地識別到各個特徵目標,很強勢!
【深度學習:目標檢測】RCNN學習筆記(1):Rich feature hierarchies for accurate object detection and semantic segmentat
轉載:http://blog.csdn.net/u011534057/article/details/51218218 rcnn主要作用就是用於物體檢測,就是首先通過selective search 選擇2000個候選區域,這些區域中有我們需要的所對應的物體的bound
【深度學習:目標檢測】RCNN學習筆記(10):SSD:Single Shot MultiBox Detector
之前一直想總結下SSD,奈何時間緣故一直沒有整理,在我的認知當中,SSD是對Faster RCNN RPN這一獨特步驟的延伸與整合。總而言之,在思考於RPN進行2-class分類的時候,能否借鑑YOLO並簡化faster rcnn在21分類同時整合faster rcnn中anchor boxes實現m
影象目標檢測與跟蹤學習筆記(三)
一. 課堂小結 這一週主要是三個小組的彙報展示,分別是:直方圖&haar like feature、PCA&LBP與HOG,在準備彙報的過程中,查閱相關資料,對概念有了比較深的理解,通過聽其他組的彙報,也在短時間內瞭解到了演算法的基本思想,受益頗豐。
【深度學習:目標檢測】 RCNN學習筆記(11):R-FCN: Object Detection via Region-based Fully Convolutional Networks
轉自:http://blog.csdn.NET/shadow_guo/article/details/51767036 作者代季峰 1,14年畢業的清華博士到微軟亞洲研究院的視覺計算組,CVPR 16 兩篇一作的會議主持人同時公佈了原始碼~ 2 1. 簡介
深度學習之目標檢測常用演算法原理+實踐精講 YOLO / Faster RCNN / SSD / 文字檢測 / 多工網路
深度學習之目標檢測常用演算法原理+實踐精講 YOLO / Faster RCNN / SSD / 文字檢測 / 多工網路 資源獲取連結:點選這裡 第1章 課程介紹 本章節主要介紹課程的主要內容、核心知識點、課程涉及到的應用案例、深度學習演算法設計通用流程、適應人群、學習本門
CNN目標檢測系列演算法發展脈絡——學習筆記(一):AlexNet
在諮詢了老師的建議後,最近開始著手深入的學習一下目標檢測演算法,結合這兩天所查到的資料和個人的理解,準備大致將CNN目標檢測的發展脈絡理一理(暫時只講CNN系列部分,YOLO和SSD,後面會抽空整理)。 目標檢測的發展大致起始於2000年前後(具體我也沒去深究,如果有誤還請大佬們指正 ●ˇ∀ˇ● ),
深度學習之目標檢測常用演算法原理+實踐精講
第1章 課程介紹本章節主要介紹課程的主要內容、核心知識點、課程涉及到的應用案例、深度學習演算法設計通用流程、適應人群、學習本門課程的前置條件、學習後達到的效果等,幫助大家從整體上了解本門課程的整體脈絡。 第2章 目標檢測演算法基礎介紹本章節主要介紹目標檢測演算法的基本概念、傳統的目標檢測演算法、目前深度學習
caffe深度學習【九】目標檢測 yolo v1的caffe實現 基於VOC2007資料集
YOLO v1演算法原文的作者是在darknet框架下實現的, 原文作者的實現 ,這裡主要講的是caffe版本的YOLO實現,主要採用yeahkun寫的:點選開啟連結 其實只是步驟相對來說有點繁瑣,但是要跑通並不困難: 大致步驟包括: 1、編譯ca
計算機視覺筆記及資料整理(含影象分割、目標檢測小方向學習)
前言 1、簡單聊聊: 在我腦海中我能通過這些年聽到的技術名詞來感受到技術的更新及趨勢,這種技術發展有時候我覺得連關注的腳步都趕不上。簡單回顧看看,從我能聽到的技術名詞來感受,最開始耳聞比較多「雲端計算」這玩意,後來聽到比較多的是「資料探勘」,當時想著等考上研也要
基於深度學習的【目標檢測】演算法綜述
目標檢測一直是計算機視覺的基礎問題,在 2010 年左右就開始停滯不前了。自 2013 年一篇論文的發表,目標檢測從原始的傳統手工提取特徵方法變成了基於卷積神經網路的特徵提取,從此一發不可收拾。本文將跟著歷史的潮流,簡要地探討「目標檢測」演算法的兩種思想和這些
[學習筆記] Berlekamp-Massey演算法 - 學習筆記
重新實現了一個看上去就像是對的的東西。 推薦:傳送門 講的很清楚了,不多贅述。 #include<bits/stdc++.h> #define gc getchar() #define rep(i,a,b) for(int i=a;i<=b;i++) #define R
資料結構與演算法學習筆記之後進先出的“桶”
前言 棧最為一種的常用的資料結構,用“桶”來形容最合適不過;今天我們就來學習一下 正文 一、棧的定義? 1.“後進先出,先進後出”的資料結構。 2.從操作特性來看,是一種“操作受限”的線性表,只可以在一端插入和刪除資料。 二、為什麼需要棧?
C++ 泛型演算法學習筆記(equal, accumulate, back_iterator, pair)
equal equal是區間比較演算法 原型為: template <class _InputIterator1, class _InputIterator2> inline _LIBCPP_INLINE_VISIBILITY bool equal(_InputIt
[目標檢測]YOLO原理
本文轉自:https://www.cnblogs.com/fariver/p/7446921.html 1 YOLO 創新點: 端到端訓練及推斷 + 改革區域建議框式目標檢測框架 + 實時目標檢測 1.1 創新點 (1) 改革了區域建議框式檢測框架: RCNN系列均需要生成建議框,在
演算法學習筆記(一)
演算法筆記(一) 一 什麼是正確的回答一個演算法問題 回答一個演算法問題,並不是一下子回答出來一個解決方案,而應該是和麵試官探討的過程,在探討過程中逐漸選擇一個最優方案 對一組資料進行排序 這組資料有什麼樣的特徵? 有沒有包含大量重複的元素?