
計算feature map座標方式
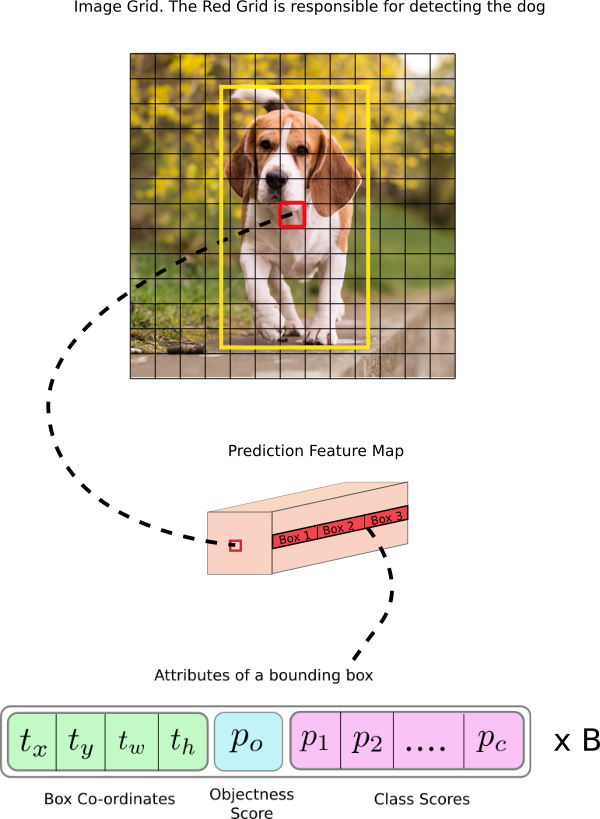
圖中網格為13x13,即grid_size = 13。
將每個網格用(x,y)座標表示。
grid = np.arrange(grid_size) a, b = np.meshgrid(grid, grid) #a,b 均為13x13矩陣 x_offset = torch.FloatTensor(a).view(-1, 1) y_offset = torch.FloatTensor(b).view(-1, 1) x_y_offset = torch.cat((x_offset, y_offset), 1).repeat(1, num_anchors).view(-1, 2).unsqueeze(0) ''' ( 0 ,.,.) = 0 0 0 0 0 0 ⋮ 12 12 12 12 12 12 [torch.FloatTensor of size 1x507x2] '''
相關推薦
計算feature map座標方式
圖中網格為13x13,即grid_size = 13。 將每個網格用(x,y)座標表示。 grid = np.arrange(grid_size) a, b = np.meshgrid(grid, grid) #a,b 均為13x13矩陣 x_offset = torch.FloatT
在CNN網絡中roi從原圖映射到feature map中的計算方法
ria family span soft ast scale pat style 操作 在使用fast rcnn以及faster rcnn做檢測任務的時候,涉及到從圖像的roi區域到feature map中roi的映射,然後再進行roi_pooling之類的操作。比如圖像的
feature map大小計算方法
(1)邊長的計算公式是: output_h =(originalSize_h+padding*2-kernelSize_h)/stride +1 輸入圖片大小為200×200,依次經過一層卷積(kernel size 5×5,padding 1,stride 2),poo
卷積後feature map尺寸計算公式
畫素寬度:W(Width) 填充大小:P(Padding) 卷積核大小:K(Kernel-size) 步長大小:S(stride) 卷積後所得feature map尺寸大小計算公式如下: 補充: 1.Padding的作用用於解決影象邊
TensorFlow函式中的shape引數介紹、feature map大小的計算方法
TensorFlow函式中的shape引數介紹: TensorFlow用張量這種資料結構來表示所有的資料。你可以把一個張量想象成一個n維的陣列或列表。一個張量有一個靜態型別和動態型別的維數,張量可以在圖中的節點之間流通。 tensorflow中張量(tensor)的屬性有
CNN feature map 大小的計算公式
請參考:http://blog.csdn.net/cheese_pop/article/details/51955915 輸入:N0*C0*H0*W0 輸出:N1*C1*H1*W1 輸出的feature map大小: H1=(H0+2*pad-kernel_size
AlexNet層級分析(涉及:卷積核操作下下層網路特徵圖size計算;對通道和卷積核尺寸及通道前層feature map和卷積核的運算關係的解釋)
先盜一圖,摘自ImageNet Classification with Deep Convolutional Neural Networks(Hinton)注:看到這個結構,可以得到以下結論(以2、3層為例)1、第三層有128*2=256個通道,第二層有48*2=96個通道。
feature map計算方法與faster-rcnn中roi對映到feature map的位置計算方法
整理下關於CNN引數這塊的知識。 CNN一個牛逼的地方就在於通過感受野和權值共享減少了神經網路需要訓練的引數的個數。 下圖左:如果我們有1000x1000畫素的影象,有1百萬個隱層神經元,那麼他們全連線的話(每個隱層神經元都連線影象的每一個畫素點),就有1000x1
TensorFlow與caffe中卷積層feature map大小計算
剛剛接觸Tensorflow,由於是做影象處理,因此接觸比較多的還是卷及神經網路,其中會涉及到在經過卷積層或者pooling層之後,影象Feature map的大小計算,之前一直以為是與caffe相同的,後來查閱了資料發現並不相同,將計算公式貼在這裡,以便查閱: caffe中: TF中:
在CNN網路中roi從原圖對映到feature map中的計算方法
在使用fast rcnn以及faster rcnn做檢測任務的時候,涉及到從影象的roi區域到feature map中roi的對映,然後再進行roi_pooling之類的操作。比如影象的大小是(600,800),在經過一系列的卷積以及pooling操作之後在某一個層中得到的f
【MySQL】計算 TPS,QPS 的方式
方式 數據庫服務 引擎 jpg div bat 網上 qps HR 摘自:https://blog.csdn.net/weiwangchao_/article/details/51198571 在做db基準測試的時候,qps,tps 是衡量數據庫性能的關鍵指標。本文比較
遞歸、嵌套for循環、map集合方式實現樹形結構菜單列表查詢
嵌套 ava oid str rip res 邏輯 分享圖片 private 有時候, 我們需要用到菜單列表,但是怎麽樣去實現一個菜單列表的編寫呢,這是一重要的問題。 比如我們需要編寫一個樹形結構的菜單,那麽我們可以使用JQuery的zTree插件:http://www.t
CNN中feature map、卷積核、卷積核個數、filter、channel的概念解釋,以及CNN 學習過程中卷積核更新的理解
feature map、卷積核、卷積核個數、filter、channel的概念解釋 feather map的理解 在cnn的每個卷積層,資料都是以三維形式存在的。你可以把它看成許多個二維圖片疊在一起(像豆腐皮一樣),其中每一個稱為一個feature map。 feather map 是怎
計算兩點地理座標之間的距離
/** * 計算兩點地理座標之間的距離 * @param Decimal $longitude1 起點經度 * @param Decimal $latitude1 起點緯度 * @param Decimal $longitude2 終點經度 * @param Decimal $
OpenStack中計算disk資源的方式(by quqi99)
版權宣告:可以任意轉載,轉載時請務必以超連結形式標明文章原始出處和作者資訊及本版權宣告 (作者:張華 發表於:2018-06-22) 使用disk-overcommit引數可允許超載, 這時, 下面的disk_available_least是有可能為負數的. 例如建立一個和計算節點可
HTML熱區map座標,隨視窗大小自適應辦法(javascript)
<%@ page language="java" contentType="text/html; charset=UTF-8" pageEncoding="UTF-8"%> <!DOCTYPE html > <html> <h
CNN中的feature map
個人學習CNN的一些筆記,比較基礎,整合了其他部落格的內容 feather map的理解在cnn的每個卷積層,資料都是以三維形式存在的。你可以把它看成許多個二維圖片疊在一起(像豆腐皮豎直的貼成豆腐塊一樣),其中每一個稱為一個feature map。 feather map
把資料通過串列埠或USB以1秒間隔實時發給另外一臺計算機,在另外一臺計算機上以同樣方式顯示條形圖或趨勢曲線。
前面兩篇文章已經講過了隨機資料產生,繪製直方圖,趨勢圖,資料儲存,串列埠傳送。接下來則是串列埠接收部分的程式。 注意:如果在一臺電腦上進行除錯,需要用虛擬串列埠軟體把串列埠1,2連結起來。 // 作業Dlg.cpp : 實現檔案 // #includ
PHP 計算兩點地理座標之間的距離
/** * 計算兩點地理座標之間的距離 * @param Decimal $longitude1 起點經度 * @param Decimal $latitude1 起點緯度 * @param Decimal $longitude2 終點經度 * @param Decima
feature map 卷積核等
<link rel="stylesheet" href="https://csdnimg.cn/release/phoenix/template/css/ck_htmledit_views-e4c7a3727d.css