
學習筆記-感知機
- 感知機的解不唯一,與初始值和選取的誤分類點有關
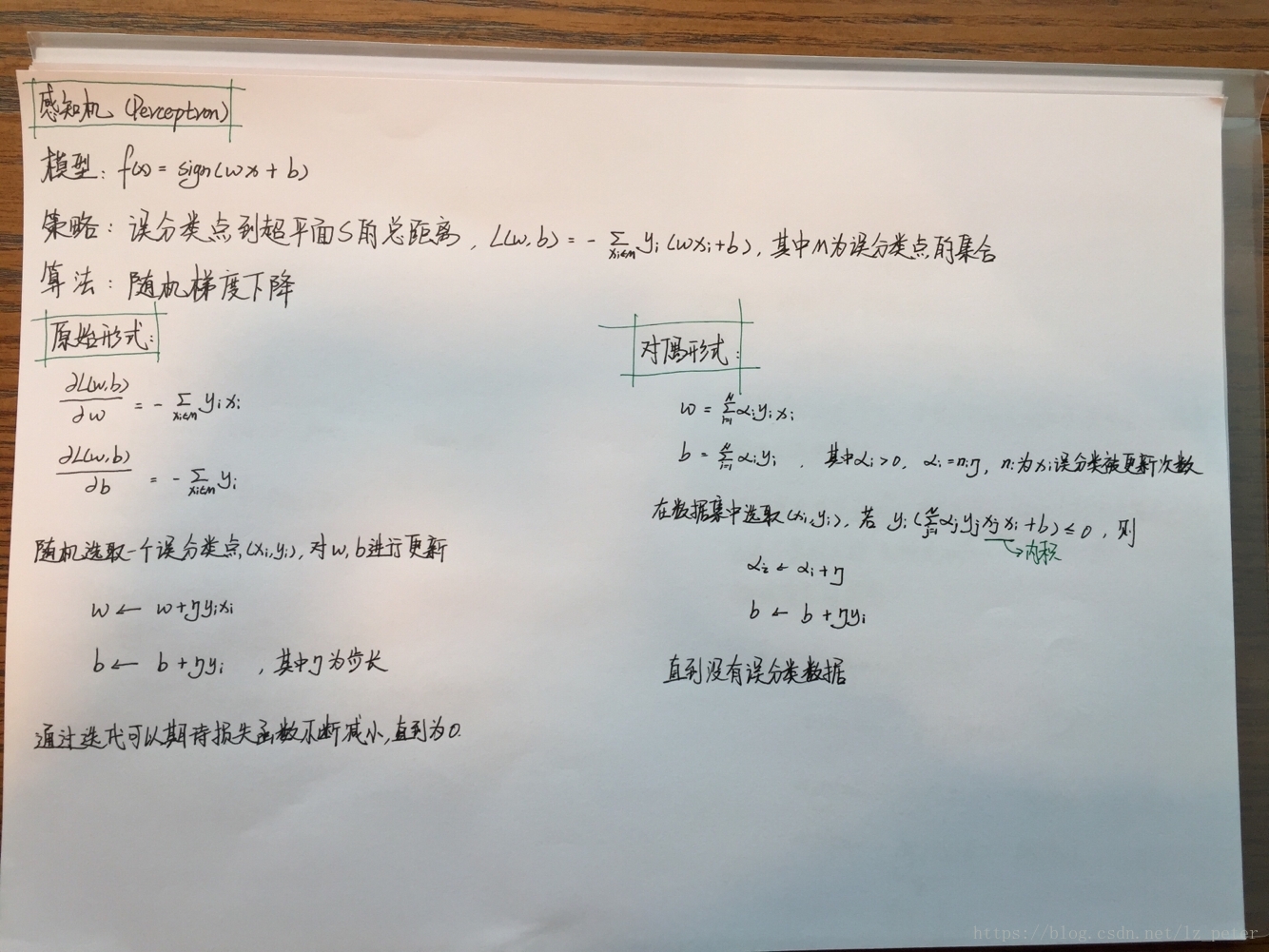
- 感知機學習演算法包括原始形式和對偶形式
- 對偶形式是對演算法執行速度的優化,引入了Gram矩陣,達到一次計算,多次使用的效果
- 損失函式為誤分類點到超平面距離之和(凸函式)
- 引數通過隨機梯度下降法來確定(每次使用一個誤分類點)
- 對線性可分資料集,感知機演算法收斂,即經過有限次迭代可以得到一個將訓練資料集完全正確劃分的分離超平面及感知機模型
- 當訓練集線性不可分時,感知機演算法不收斂,迭代結果會發生震盪
- 感知機的分類條件是線性條件,其損失函式也是線性的,所以是一個比較簡單的凸優化問題
- 感知機演算法規定了θ的更新步驟,它導致θ不能取到中的任意值,而只能取各個資料向量的整係數線性組合。這個限制使得感知機往往會錯過最優解。同時,感知機演算法的終止條件是所有資料均正確分類,並不是最小化J(θ),所以它只會找到一個可行解,而不是使得J(θ)最小的最優解
相關推薦
深度學習筆記——感知機
程式碼參考了零基礎入門深度學習(1) - 感知器這篇文章,我只對程式碼裡可能存在的一些小錯誤進行了更改。至於感知機的原理以及程式碼裡不清楚的地方可以結合該文章理解。 from functools import reduce class Perceptron: def __init_
學習筆記-感知機
感知機的解不唯一,與初始值和選取的誤分類點有關 感知機學習演算法包括原始形式和對偶形式 對偶形式是對演算法執行速度的優化,引入了Gram矩陣,達到一次計算,多次使用的效果 損失函式為誤分類點到超平
[機器學習筆記]感知機
感知機相當於一個結點,結點權重為W,偏差為b,輸入樣本為x。 當Wx+b大於等於0時輸出為+1正例,小於0時輸出-1反例。為二分類 模型: 上式為輸入空間到輸出空間的函式,感知機是一種線性模型,判別模型。 策略: 目標是最小化誤分類點的個數,然而個數不是W,b的可
機器學習之感知機學習筆記第一篇:求輸入空間R中任意一點X0到超平面S的距離
我的學習資料是“統計學習方法”,作者是李航老師,這本書很著名,百度有很多關於它的PDF。 作為學習筆記,就說明我還是屬於學習中,所以,這個分類中我暫時不打算討論詳細的演算法,這個分類會講到我在學習遇到的問題和我自己解決這些問題的思路。 今天這個問題(見題目)是在學習李航老師
深入理解Java虛擬機- 學習筆記 - 虛擬機類加載機制
支持 pub eth 獲取 事件 必須 string 沒有 字節碼 虛擬機把描述類的數據從Class文件加載道內存,並對數據進行校驗,轉換解析和初始化,最終形成可以被虛擬機直接使用的Java類型,這就是虛擬機的類加載機制。在Java裏,類型的加載、連接和初始化過程都是在程序
Linux學習筆記-虛擬機安裝centos7-配置靜態IP
linux目的更方便操作,遠程登錄主機 tcp/ip通信 目前NAT 分享物理機網絡(特殊校園網)dhclient 動態自動獲取IP ip add 查看網卡IP設置靜態IP[[email protected]/* */ ~]# ip addvi /etc/syscon
【城北徐公之機器學習】感知機模型
com eno 學習 nwr mys rtl wms fc7 rcu 一、什麽是感知機? 感知機最早由計算科學家Rosenblatt在1958年提出,他是一種單層(註意,輸入層並不計算在內)神經網絡。如圖為一個二元輸入的感知機模型。 其中x1,x2為輸入,b為偏置,激活函數
機器學習之感知機
今天,我將和大家一起學習機器學習中的感知機演算法。感知機(perceptron)是二類分類的線性分類模型,其輸入為例項的特徵向量,輸出為例項的類別,取+1和-1二值。感知機對應於輸入空間(特徵空間)中將例項劃分為正負兩類的分離超平面。因此,感知機學習旨在求出將訓練資料進行線性
機器學習模型-感知機(perceptron)
Machine Learning - Perceptron 一.基本原理 二.程式碼實現 import numpy as np import pandas as pd from sklearn import datasets from sklearn.
統計學習方法感知機(附簡單模型程式碼)
1. 感知機模型 輸入為例項的特徵向量, 輸出為例項的類別, 取+1和-1;感知機對應於輸入空間中將例項劃分為正負兩類的分離超平面, 屬於判別模型;匯入基於誤分類的損失函式;利用梯度下降法對損失函式進行極小化;感知機學習演算法具有簡單而易於實現的優點, 分為原始形式和對偶形式;1957年由Ros
筆記-感知機、超平面
1.感知機 感知機是一種二分類的線性分類模型,輸入為例項的特徵向量,輸出為例項的類別{+1,-1}。感知機要求資料集是線性可分的。 按照統計學習三要素模型、策略、演算法的順序來介紹。 2.感知機模型 由輸入空間到輸出空間的如下函式: f(x)=si
統計學習方法——感知機演算法(基於R語言)
演算法2.1 train <- function(mat) { nr <- nrow(mat) nc <- ncol(mat) w0 <- matrix(0,nc - 1,1) b0 <- 0
機器學習之感知機(Perceptron)模型
機器學習之Perceptron模型 本文主要介紹機器學習領域最為基礎的模型,感知機模型: 1、感知機模型介紹 2、感知機數學原理 3、演算法及Python程式碼實現 4、小結 1、感知機模型介紹 定義(感知機) 假設輸入空間(特徵空間)
深入淺出神經網路與深度學習--神經元感知機單層神經網路介紹(-)
1 概述寫神經網路與深度學習方面的一些知識,是一直想做的事情。但本人比較懶惰,有點時間想玩點遊戲呀什麼的,一直拖到現在。也由於現在已經快當爸了,心也沉了下來,才能去梳理一些東西。本文會深入檢出的去看神經網路與深度學習的一些知識,包含一些演算法、基礎等,比較適合初學者。
機器學習模型--感知機
感知機模型是一個非常基礎的模型,是神經網路的根基。 感知機模型 感知機模型是一個二分類的線性分類模型,輸入是樣本的特徵向量,輸出是樣本的類別,取值+1和-1。 模型定義 假設輸入空間(特徵空間)是⊆Rn,輸出空間是={+1,−1}。輸入x∈表示
【機器學習】感知機Python程式碼實現
回顧 感知機 前面我們介紹了感知機,它是一個二分類的線性分類器,輸入為特徵向量,輸出為例項的類別。感知機演算法利用隨機梯度下降法對基於誤分類的損失函式進行最優化求解,得到感知機模型,即求解w,bw,b。感知機演算法簡單易於實現,那麼我們如何通過python程
【機器學習基石筆記】二、感知機
證明 機器學習 sign 線性可分 缺點 學習 犯錯 nbsp 錯誤 感知機算法: 1、首先找到點,使得sign(wt * xt) != yt, 那麽如果yt = 1,說明wt和xt呈負角度,wt+1 = wt + xt能令wt偏向正角度。 如果yt = -1, 說
機器學習的簡要筆記(四)——感知機的算法
author upd str eight 形式 最小化 turn ads urn 1、什麽是感知機(Perception) 感知機是生物神經細胞的簡單抽象。神經細胞結構大致可分為:樹突、突觸、細胞體及軸突。單個神經細胞可被視為一種只有兩種狀態的機器—&mdas
《統計學習方法》筆記第二章 —— 感知機
主要內容: 一、感知機模型 二、感知機學習策略(線性可分) 三、感知機學習演算法 一、感知機模型 1.所謂感知機,其實就是一個在n維空間內的超平面(n-1維),這個超平面將整個空間分為兩部分。 2.該超平面S被定義為:w*x + b = 0。其中,w
機器學習筆記 perceptron(感知機) 在ex4Data資料集上的實現
慣例的ML課堂作業,第四個也是最後一個線性分類模型,感知機。 感知機是一個非常簡單的線性分類模型,簡單來說就是一個神經元,其啟用函式是門限函式,有n個輸入和一個輸出,和神經元結構十分相似。 感知機的損失函式是看作是分類錯的所有樣本的輸出值的和 hw的輸出就是