
調頻連續波雷達(FMCW)測距/測速原理
雷達按照發射訊號種類分成脈衝雷達和連續波雷達兩大類,常規脈衝雷達發射週期性的高頻脈衝,連續波雷達發射的是連續波訊號。
連續波雷達發射的訊號可以是單頻連續波(CW)或者調頻連續波(FMCW),調頻方式也有多種,常見的有三角波、鋸齒波、編碼調製或者噪聲調頻等。其中,單頻連續波雷達僅可用於測速,無法測距,而FMCW雷達既可測距又可測速,並且在近距離測量上的優勢日益明顯。

FMCW雷達在掃頻週期內發射頻率變化的連續波,被物體反射後的回波與發射訊號有一定的頻率差,通過測量頻率差可以獲得目標與雷達之間的距離資訊,差頻訊號頻率較低,一般為KHz,因此硬體處理相對簡單、適合資料採集並進行數字訊號處理。
FMCW雷達收發同時,理論上不存在脈衝雷達所存在的測距盲區,並且發射訊號的平均功率等於峰值功率,因此只需要小功率的器件,從而降低了被截獲干擾的概率;其缺點是測距量程較短,距離多普勒耦合以及收發隔離難等缺點。
FMCW雷達具有容易實現、結構相對簡單、尺寸小、重量輕以及成本低等優點,在民用/軍事領域均得到了廣泛的應用。
FMCW雷達框圖
調頻連續波雷達如要由收發器和帶微處理器的控制單元組成,收發器如果使用單個天線進行同時發射和接收,FMCW雷達需要鐵氧體環形器來分離發射和接收訊號,對隔離度要求較高。當然,若使用收發分離的貼片天線,成本會相對低一點。
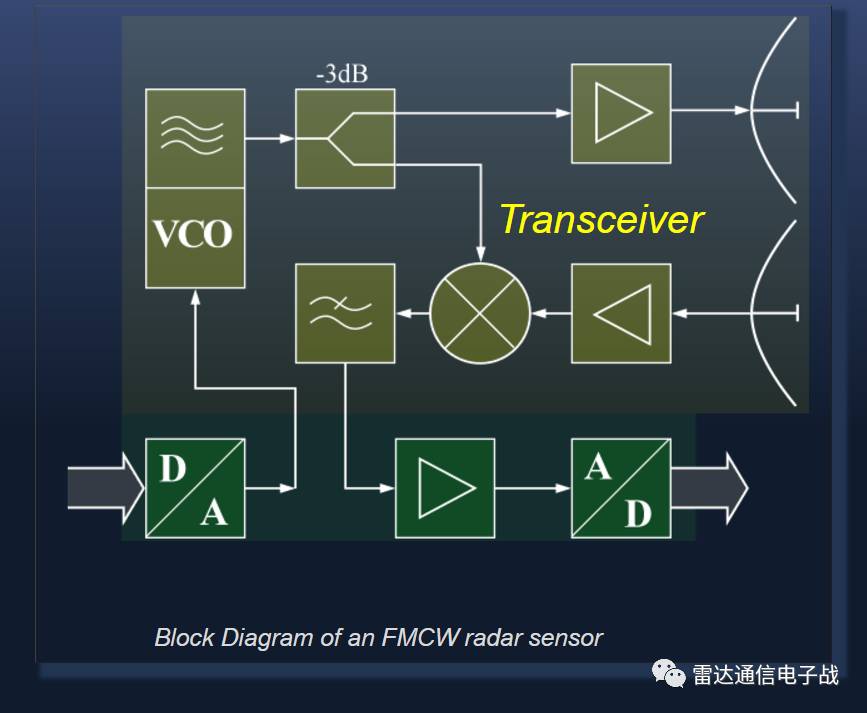
高頻訊號由壓控振盪器(VCO)產生,通過功率分配器將一部分經過額外放大後饋送至發射天線,另一部分耦合至混頻器,與接收的回波混頻、低通濾波,得到基帶差頻訊號,經過模數轉換後送至微處理器處理。
FMCW雷達的測距/測速原理
以三角波調頻連續波為例來簡單介紹雷達的測距/測速原理。如下圖,紅色為發射訊號頻率,綠色為接收訊號頻率,掃頻週期為T,掃頻頻寬為B,發射訊號經過目標發射,回波訊號會有延時,在三角形的頻率變化中,可以在上升沿和下降沿兩者上進行距離測量。
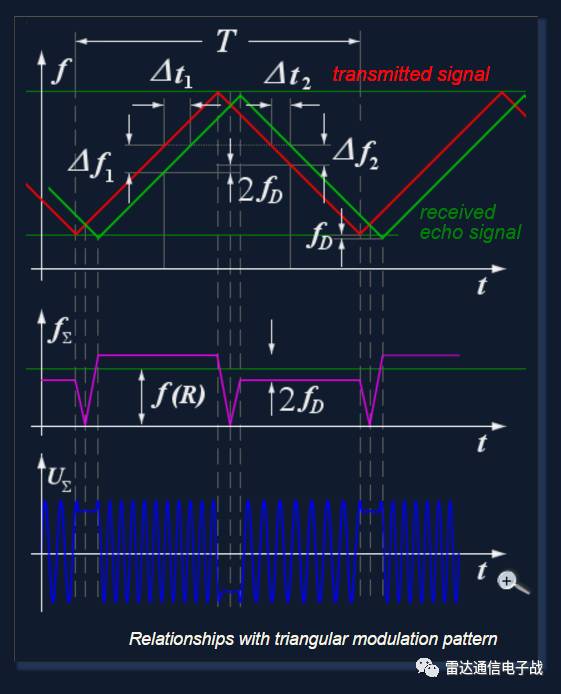
如果沒有多普勒頻率,上升沿期間的頻率差值等於下降沿期間的測量值。對於運動目標,則上升/下降沿期間的頻率差不同,我們可以通過這二個頻率差來測距和測速。
差拍訊號經低通濾波和放大後送數字訊號處理器,完成對差拍訊號的FFT、檢測,對目標資料進行計算後送顯控終端顯示。
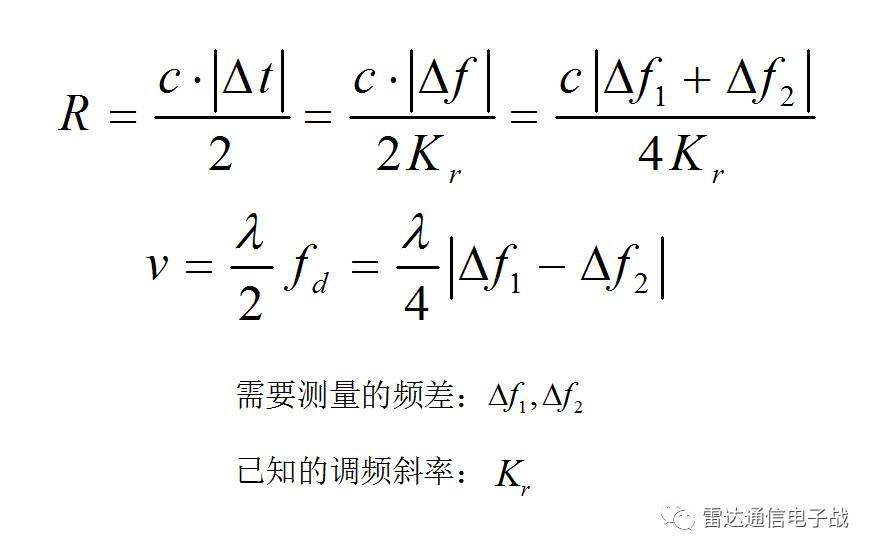
三角波調頻連續波雷達正是通過採用正負調頻斜率來消除距離與速度的耦合,進而進行目標速度的估計。