
眼睛橫縱比來做 側眼眨眼檢測 技術
眨眼檢測
與用於計算閃爍的傳統影象處理方法不同,閃爍通常涉及以下的某些組合:
- 眼睛定位。
- 閾值找到眼睛的白色。
- 確定眼睛的“白色”區域是否消失一段時間(表示眨眼)。
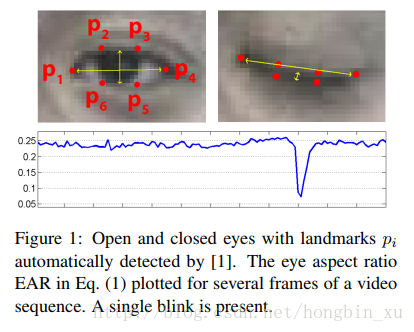
眼睛縱橫比是一種 更優雅的解決方案,其涉及 基於眼睛的面部地標之間的距離比率的非常簡單的計算。
這種用於眨眼檢測的方法快速,有效且易於實現。
人臉全域性關鍵點:
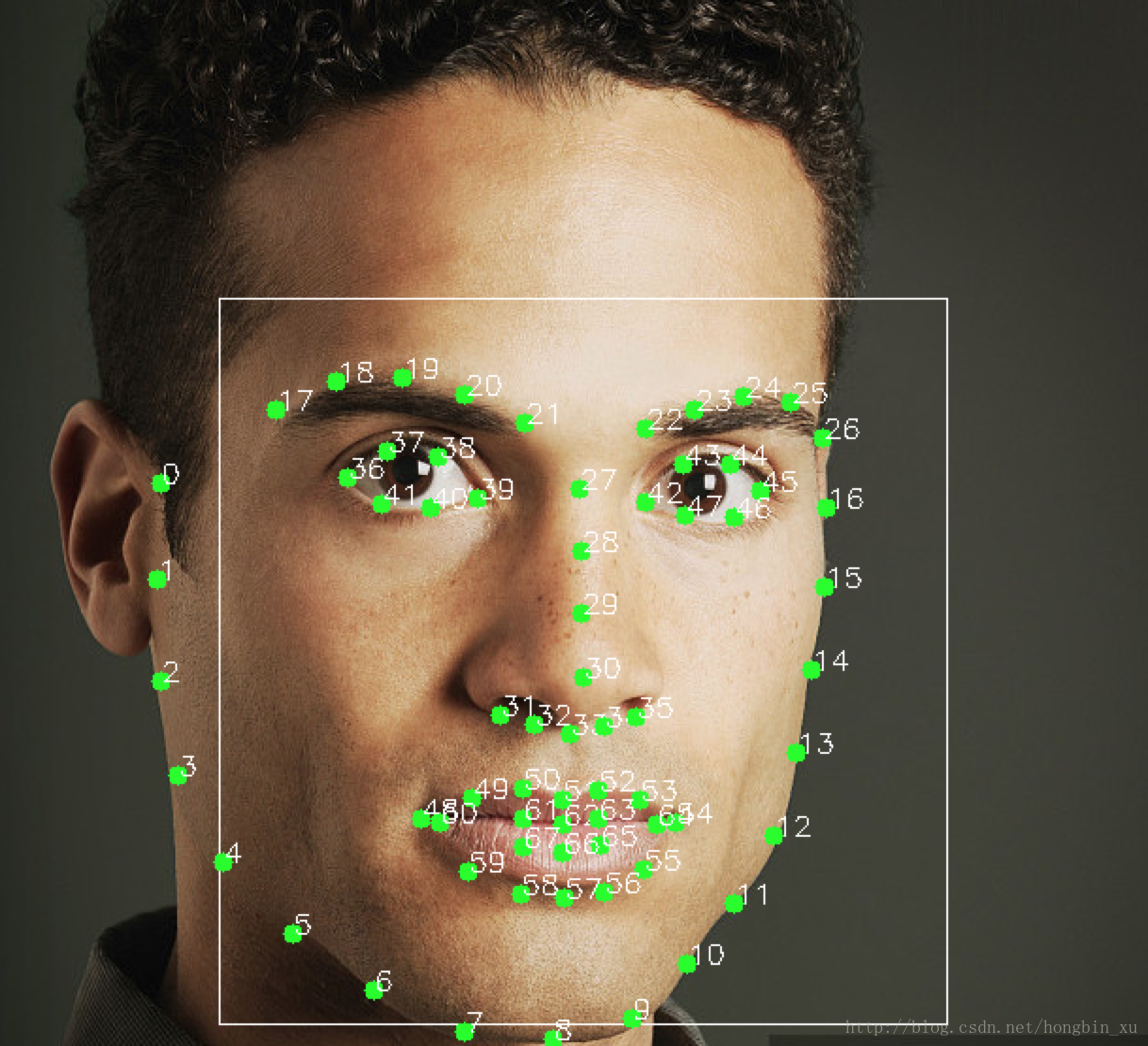
眼部關鍵點
我們視訊中的一幀是這樣的:

先嚐試用opencv作出解決方法,再從底層演算法復現加速效能。

光用opencv檢測側眼的話,效果不好,但是可以檢測出眼角。接下來考慮檢測全圖特徵點,從特徵點中發掘有價值的點。
對灰度圖用harris角點檢測效果不好
打算也做一個閾值分割,基於分割結果再看

中間的為眼部(睜眼時)

眨眼時
由此有個簡單辦法,看看有多少個大連通區域- - 當連通區域減少時,就代表了閉眼,開始這樣魯棒性和準確性肯定不夠。
嘗試Sobel運算元進行梯度檢測,採用Y軸做梯度,因為眼部Y方向梯度明顯

結果如上,灰度>10的畫素點總數 低於30000時,為閉眼幀。此演算法對於檢測 閉眼動作 較為明顯,但是對於檢測閉眼時間不太有效,原因是,閉眼後,睫毛在面板上程式設計邊緣被提取出來,產生了一定的干擾。
因為專案打算從側面檢測人眼,所以傳統的演算法效果很不好,最終基於sobel+去噪聲技術開發出了一個演算法,可以實現 較為準確的判斷。 波谷為持續閉眼時間。

# -*- coding: utf-8 -*- """ Created on Tue Sep 4 13:16:11 2018 @author: Lenovo """ import numpy as np from matplotlib import animation import matplotlib.pyplot as plt import cv2 import time from scipy.fftpack import fft,ifft cap = cv2.VideoCapture('WIN_20180831_13_51_22_Pro.mp4') pnum= list() plt.close() #clf() # 清圖 cla() # 清座標軸 close() # 關視窗 fig=plt.figure() ax=fig.add_subplot(1,1,1) plt.grid(True) #新增網格 plt.ion() #interactive mode on i=0 formerimg = np.zeros((720,1280)) iss, frame = cap.read() while iss: i=i+1 iss,img = cap.read() if iss: img = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) img=cv2.GaussianBlur(img,(5,5),20) cv2.imshow("yuantu_gaus",img) #ax.hist(img.flatten(),256) # imghist = np.histogram(img.flatten(),256)[0] # histmax = np.argmax(imghist).astype(np.uint8) # img[img>histmax-50]=255 # # print(img) # cv2.imshow("huidu",img) # sobelX = cv2.Sobel(img,cv2.CV_64F,1,0)#x方向的梯度 # sobelX = np.uint8(np.absolute(sobelX))#x方向梯度的絕對值 sobelY = cv2.Sobel(img,cv2.CV_64F,0,1)#y方向的梯度 sobelY = np.uint8(np.absolute(sobelY))#y方向梯度的絕對值 sobelY[sobelY<=20]=0 cv2.imshow("sobelY",sobelY) # # #找到輪廓 # _,contours, hierarchy = cv2.findContours(sobelY,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE) # #繪製輪廓 # cv2.drawContours(sobelY,contours,-1,(0,0,255),3) # #繪製結果 kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(5, 5)) sobelY = cv2.morphologyEx(sobelY, cv2.MORPH_OPEN, kernel) sobelY = cv2.morphologyEx(sobelY, cv2.MORPH_CLOSE, kernel) # sobelY = cv2.medianBlur(sobelY,5) pnum.append(len(sobelY[sobelY>0])) # # print(i) #cv2.imshow("result", sobelY) # plt.plot(range(len(pnum)),pnum,c='r',marker='.') # cv2.imshow("yanjiao",sobelY) plt.pause(0.01) # if cv2.waitKey(1) & 0xFF == 'q': # break # time.sleep(0.5) cv2.destroyAllWindows() plt.plot(range(len(pnum)),pnum,c='r',marker='.') # #fig=plt.figure('22') #ax2=fig.add_subplot(1,1,1) # #epnum = np.array(pnum) #avg = epnum.mean() #s=0 #countt=0 #for i in epnum: # if i> avg: # s=s+i # countt=countt+1 #avg = s/countt #print(avg) #epnum[epnum<avg]=0 #ax2.plot(range(len(pnum)),epnum,c='r',marker='.') # ##bb = plt.hist(pnum.flatten()) #print(pnum.mean()) #a = np.histogram(pnum.flatten()) ##from scipy import stats #pnum[pnum<3754]=0 #plt.plot(range(len(pnum)),pnum,c='r',marker='.')
嘗試了一下gamma矯正影象,效果不太好

現在我們探究一種新方法,因為直接計算畫素點數量,會受到睫毛的影響,那麼我們如何利用睫毛呢?
考慮到使用,質心計算的方法,當睫毛下垂的時候,質心會同時被帶下來,通過統計質心的y軸運動軌跡來評估眼睛閉合度
初步測試效果不錯

但是雙迴圈 效率較低,看看能否優化一下
# -*- coding: utf-8 -*-
"""
Created on Tue Sep 4 13:16:11 2018
@author: Lenovo
"""
import numpy as np
from matplotlib import animation
import matplotlib.pyplot as plt
import cv2
import time
from scipy.fftpack import fft,ifft
cap = cv2.VideoCapture('WIN_20180831_13_49_39_Pro.mp4')
pnum= list()
plt.close() #clf() # 清圖 cla() # 清座標軸 close() # 關視窗
fig=plt.figure()
ax=fig.add_subplot(1,1,1)
plt.grid(True) #新增網格
plt.ion() #interactive mode on
i=0
formerimg = np.zeros((720,1280))
iss, frame = cap.read()
while iss:
i=i+1
iss,img = cap.read()
if iss:
img = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
img = np.power(img/255, 0.9)
cv2.imshow("yuantu_gaus",img)
#ax.hist(img.flatten(),256)
# imghist = np.histogram(img.flatten(),256)[0]
# histmax = np.argmax(imghist).astype(np.uint8)
# img[img>histmax-50]=255
#
# print(img)
# cv2.imshow("huidu",img)
# sobelX = cv2.Sobel(img,cv2.CV_64F,1,0)#x方向的梯度
# sobelX = np.uint8(np.absolute(sobelX))#x方向梯度的絕對值
img=img*255
sobelY = cv2.Sobel(img,cv2.CV_64F,0,1)#y方向的梯度
sobelY = np.uint8(np.absolute(sobelY))#y方向梯度的絕對值
# cv2.imshow("sobelY",sobelY)
#
# #找到輪廓
# _,contours, hierarchy = cv2.findContours(sobelY,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
# #繪製輪廓
# cv2.drawContours(sobelY,contours,-1,(0,0,255),3)
# #繪製結果
# img=cv2.GaussianBlur(img,(5,5),20)
# sobelY = cv2.medianBlur(sobelY,5)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3, 3))
sobelY = cv2.morphologyEx(sobelY, cv2.MORPH_OPEN, kernel)
sobelY[sobelY<=15]=0
yi = 0
ci = 0
for i in range(sobelY.shape[0]):
for j in range(sobelY.shape[1]):
if sobelY[i,j]>0:
yi=yi+i
ci=ci+1
cv2.imshow("open",sobelY)
pnum.append(yi/ci)
#
# print(i)
#cv2.imshow("result", sobelY)
#
plt.plot(range(len(pnum)),pnum,c='r',marker='.')
# cv2.imshow("yanjiao",sobelY)
plt.pause(0.01)
# if cv2.waitKey(1) & 0xFF == 'q':
# break
# time.sleep(0.5)
cv2.destroyAllWindows()
plt.plot(range(len(pnum)),pnum,c='r',marker='.')
#
#fig=plt.figure('22')
#ax2=fig.add_subplot(1,1,1)
#
#epnum = np.array(pnum)
#avg = epnum.mean()
#s=0
#countt=0
#for i in epnum:
# if i> avg:
# s=s+i
# countt=countt+1
#avg = s/countt
#print(avg)
#epnum[epnum<avg]=0
#ax2.plot(range(len(pnum)),epnum,c='r',marker='.')
#
##bb = plt.hist(pnum.flatten())
#print(pnum.mean())
#a = np.histogram(pnum.flatten())
##from scipy import stats
#pnum[pnum<3754]=0
#plt.plot(range(len(pnum)),pnum,c='r',marker='.')
效果很棒,但是速度確實慢

測了三個視訊,效果都異常的好。
對於小影象速度快,因為迴圈遍歷少
對於雙迴圈的遍歷,採用了np庫中的where函式來快速實現,具體如下
np.where(sobelY>0)[0].mean()
表示採集y軸(通過【0】來表示)求mean平均,即可得到y軸座標
最終效果很好,對於我手上所擁有的三個視訊,檢測可以達到實時且高度準確。
接下來會安排大家進行更多的視訊採集與演算法調優。
# -*- coding: utf-8 -*-
"""
Created on Tue Sep 4 13:16:11 2018
@author: Lenovo
"""
import numpy as np
from matplotlib import animation
import matplotlib.pyplot as plt
import cv2
import time
from scipy.fftpack import fft,ifft
cap = cv2.VideoCapture('WIN_20180831_13_49_39_Pro.mp4')
pnum= list()
plt.close() #clf() # 清圖 cla() # 清座標軸 close() # 關視窗
fig=plt.figure()
ax=fig.add_subplot(1,1,1)
plt.grid(True) #新增網格
plt.ion() #interactive mode on
i=0
formerimg = np.zeros((720,1280))
iss, frame = cap.read()
while iss:
i=i+1
iss,img = cap.read()
if iss:
img = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
cv2.imshow("yuantu_gaus",img)
#ax.hist(img.flatten(),256)
# imghist = np.histogram(img.flatten(),256)[0]
# histmax = np.argmax(imghist).astype(np.uint8)
# img[img>histmax-50]=255
#
# print(img)
# cv2.imshow("huidu",img)
# sobelX = cv2.Sobel(img,cv2.CV_64F,1,0)#x方向的梯度
# sobelX = np.uint8(np.absolute(sobelX))#x方向梯度的絕對值
img=img*255
sobelY = cv2.Sobel(img,cv2.CV_64F,0,1)#y方向的梯度
sobelY = np.uint8(np.absolute(sobelY))#y方向梯度的絕對值
# cv2.imshow("sobelY",sobelY)
#
# #找到輪廓
# _,contours, hierarchy = cv2.findContours(sobelY,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
# #繪製輪廓
# cv2.drawContours(sobelY,contours,-1,(0,0,255),3)
# #繪製結果
# img=cv2.GaussianBlur(img,(5,5),20)
# sobelY = cv2.medianBlur(sobelY,5)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3, 3))
sobelY = cv2.morphologyEx(sobelY, cv2.MORPH_OPEN, kernel)
sobelY[sobelY<=15]=0
#
# yi = 0
# ci = 0
# for i in range(sobelY.shape[0]):
# for j in range(sobelY.shape[1]):
# if sobelY[i,j]>0:
# yi=yi+i
# ci=ci+1
cv2.imshow("open",sobelY)
pnum.append(np.where(sobelY>0)[0].mean())
#
# print(i)
#cv2.imshow("result", sobelY)
#
plt.plot(range(len(pnum)),pnum,c='r',marker='.')
# cv2.imshow("yanjiao",sobelY)
plt.pause(0.01)
# if cv2.waitKey(1) & 0xFF == 'q':
# break
# time.sleep(0.5)
cv2.destroyAllWindows()
plt.plot(range(len(pnum)),pnum,c='r',marker='.')
#
#fig=plt.figure('22')
#ax2=fig.add_subplot(1,1,1)
#
#epnum = np.array(pnum)
#avg = epnum.mean()
#s=0
#countt=0
#for i in epnum:
# if i> avg:
# s=s+i
# countt=countt+1
#avg = s/countt
#print(avg)
#epnum[epnum<avg]=0
#ax2.plot(range(len(pnum)),epnum,c='r',marker='.')
#
##bb = plt.hist(pnum.flatten())
#print(pnum.mean())
#a = np.histogram(pnum.flatten())
##from scipy import stats
#pnum[pnum<3754]=0
#plt.plot(range(len(pnum)),pnum,c='r',marker='.')通過gamma變換,我們可以做區域性增強效果
舉個例子,比如夜景中拍出來的圖片噪聲很多,於是我們先通過 高值gamma 增加對比度,減少噪聲,然後再通過區域性低值gamma,提升特徵亮度,突出細節與輪廓

在之前的眼部追蹤中,我通過這種思路,實現了較好的閾值分割與抗噪聲。
# -*- coding: utf-8 -*-
"""
Created on Tue Sep 4 13:16:11 2018
@author: Lenovo
"""
import numpy as np
from matplotlib import animation
import matplotlib.pyplot as plt
import cv2
import time
from scipy.fftpack import fft,ifft
cap = cv2.VideoCapture('WIN_20180831_13_49_39_Pro.mp4')
pnum= list()
pnum.append(300)
plt.close() #clf() # 清圖 cla() # 清座標軸 close() # 關視窗
fig=plt.figure()
ax=fig.add_subplot(1,1,1)
plt.grid(True) #新增網格
plt.ion() #interactive mode on
i=0
formerimg = np.zeros((720,1280))
iss, frame = cap.read()
while iss:
i=i+1
iss,img = cap.read()
if iss:
img = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
cv2.imshow("yuantu_gaus",img)
img=cv2.GaussianBlur(img,(5,5),20)
img = np.power(img / 255.0, 1.3)
img = img*255
#ax.hist(img.flatten(),256)
# imghist = np.histogram(img.flatten(),256)[0]
# histmax = np.argmax(imghist).astype(np.uint8)
# img[img>histmax-50]=255
#
# print(img)
# cv2.imshow("huidu",img)
# sobelX = cv2.Sobel(img,cv2.CV_64F,1,0)#x方向的梯度
# sobelX = np.uint8(np.absolute(sobelX))#x方向梯度的絕對值
# img=img*255
sobelY = cv2.Sobel(img,cv2.CV_64F,0,1)#y方向的梯度
sobelY = np.uint8(np.absolute(sobelY))#y方向梯度的絕對值
# cv2.imshow("sobelY",sobelY)
#
# #找到輪廓
# _,contours, hierarchy = cv2.findContours(sobelY,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
# #繪製輪廓
# cv2.drawContours(sobelY,contours,-1,(0,0,255),3)
# #繪製結果
# img=cv2.GaussianBlur(img,(5,5),20)
sobelY = cv2.medianBlur(sobelY,5)
# kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3, 3))
# sobelY = cv2.morphologyEx(sobelY, cv2.MORPH_OPEN, kernel)
sn = np.histogram(sobelY)[1]
sobelY[sobelY<=sn[0:3].mean()]=0
#
# yi = 0
# ci = 0
# for i in range(sobelY.shape[0]):
# for j in range(sobelY.shape[1]):
# if sobelY[i,j]>0:
# yi=yi+i
# ci=ci+1
ypoint = int(np.where(sobelY>0)[0].mean())
xpoint = int(np.where(sobelY>0)[1].mean())
# img.flags.WRITEABLE =True
img = img/255.0
img[ypoint-200:ypoint+300,xpoint-300:xpoint+300] = np.power(img[ypoint-200:ypoint+300,xpoint-300:xpoint+300], 0.5)
img = img*255
img = np.uint8(np.absolute(img))#y方向梯度的絕對值
cv2.imshow("local_h",img)
sobelY = cv2.Sobel(img,cv2.CV_64F,0,1)#y方向的梯度
sobelY = np.uint8(np.absolute(sobelY))#y方向梯度的絕對值
cv2.imshow("local_sobelY",sobelY)
ypoint = int(np.where(sobelY>0)[0].mean())
xpoint = int(np.where(sobelY>0)[1].mean())
if np.absolute(ypoint-pnum[-1])<=1:
ypoint=pnum[-1]
cv2.imshow("open",sobelY)
pnum.append(ypoint)
#
# print(i)
#cv2.imshow("result", sobelY)
#
plt.plot(range(len(pnum)),pnum,c='r',marker='.')
# cv2.imshow("yanjiao",sobelY)
plt.pause(0.01)
# if cv2.waitKey(1) & 0xFF == 'q':
# break
# time.sleep(0.5)
cv2.destroyAllWindows()
plt.plot(range(len(pnum)),pnum,c='r',marker='.')
#
#fig=plt.figure('22')
#ax2=fig.add_subplot(1,1,1)
#
#epnum = np.array(pnum)
#avg = epnum.mean()
#s=0
#countt=0
#for i in epnum:
# if i> avg:
# s=s+i
# countt=countt+1
#avg = s/countt
#print(avg)
#epnum[epnum<avg]=0
#ax2.plot(range(len(pnum)),epnum,c='r',marker='.')
#
##bb = plt.hist(pnum.flatten())
#print(pnum.mean())
#a = np.histogram(pnum.flatten())
##from scipy import stats
#pnum[pnum<3754]=0
#plt.plot(range(len(pnum)),pnum,c='r',marker='.')加上這些步驟以後,(後面坐了少量優化)程式碼就不放上來了,速度 10FPS
因為我們的專案要達到極速實時模式,所以去掉很多 提高精度的程式碼後,速度可以達到天花板(與視訊採集幀率同速)

實時版本程式碼如下:
# -*- coding: utf-8 -*-
"""
Created on Tue Sep 4 13:16:11 2018
@author: Lenovo
"""
import numpy as np
from matplotlib import animation
import matplotlib.pyplot as plt
import cv2
import time
from scipy.fftpack import fft,ifft
cap = cv2.VideoCapture('WIN_20180831_13_49_39_Pro.mp4')
pnum= list()
pnum.append(300)
plt.close() #clf() # 清圖 cla() # 清座標軸 close() # 關視窗
fig=plt.figure()
ax=fig.add_subplot(1,1,1)
plt.grid(True) #新增網格
plt.ion() #interactive mode on
i=0
formerimg = np.zeros((720,1280))
iss, frame = cap.read()
s = time.time()
while iss:
i=i+1
iss,img = cap.read()
if iss:
img = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# cv2.imshow("yuantu_gaus",img)
# img=cv2.GaussianBlur(img,(5,5),20)
# img = np.power(img / 255.0, 1.3)
# img = img*255
#ax.hist(img.flatten(),256)
# imghist = np.histogram(img.flatten(),256)[0]
# histmax = np.argmax(imghist).astype(np.uint8)
# img[img>histmax-50]=255
#
# print(img)
# cv2.imshow("huidu",img)
# sobelX = cv2.Sobel(img,cv2.CV_64F,1,0)#x方向的梯度
# sobelX = np.uint8(np.absolute(sobelX))#x方向梯度的絕對值
# img=img*255
sobelY = cv2.Sobel(img,cv2.CV_64F,0,1)#y方向的梯度
sobelY = np.uint8(np.absolute(sobelY))#y方向梯度的絕對值
# cv2.imshow("sobelY",sobelY)
#
# #找到輪廓
# _,contours, hierarchy = cv2.findContours(sobelY,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
# #繪製輪廓
# cv2.drawContours(sobelY,contours,-1,(0,0,255),3)
# #繪製結果
# img=cv2.GaussianBlur(img,(5,5),20)
# sobelY = cv2.medianBlur(sobelY,5)
# kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3, 3))
# sobelY = cv2.morphologyEx(sobelY, cv2.MORPH_OPEN, kernel)
sn = np.histogram(sobelY)[1]
sobelY[sobelY<=sn[0:3].mean()]=0
#
# yi = 0
# ci = 0
# for i in range(sobelY.shape[0]):
# for j in range(sobelY.shape[1]):
# if sobelY[i,j]>0:
# yi=yi+i
# ci=ci+1
ypoint = int(np.where(sobelY>0)[0].mean())
# xpoint = int(np.where(sobelY>0)[1].mean())
## img.flags.WRITEABLE =True
# img = img/255.0
# img[ypoint-200:ypoint+300,xpoint-300:xpoint+300] = np.power(img[ypoint-200:ypoint+300,xpoint-300:xpoint+300], 0.5)
# img = img*255
# img = np.uint8(np.absolute(img))#y方向梯度的絕對值
# cv2.imshow("local_h",img)
# sobelY = cv2.Sobel(img,cv2.CV_64F,0,1)#y方向的梯度
# sobelY = np.uint8(np.absolute(sobelY))#y方向梯度的絕對值
# cv2.imshow("local_sobelY",sobelY)
#
# ypoint = np.where(sobelY>0)[0].mean()
# xpoint = np.where(sobelY>0)[1].mean()
#
# if np.absolute(ypoint-pnum[-1])<=3:
# ypoint=pnum[-1]
# cv2.imshow("open",sobelY)
pnum.append(ypoint)
#
# print(i)
#cv2.imshow("result", sobelY)
# plt.plot(range(len(pnum)),pnum,c='r',marker='.')
# cv2.imshow("yanjiao",sobelY)
# plt.pause(0.01)
# if cv2.waitKey(1) & 0xFF == 'q':
# break
# time.sleep(0.5)
e=time.time()
print(e-s)
cv2.destroyAllWindows()
plt.plot(range(len(pnum)),pnum,c='r',marker='.')
#
#fig=plt.figure('22')
#ax2=fig.add_subplot(1,1,1)
#
#epnum = np.array(pnum)
#avg = epnum.mean()
#s=0
#countt=0
#for i in epnum:
# if i> avg:
# s=s+i
# countt=countt+1
#avg = s/countt
#print(avg)
#epnum[epnum<avg]=0
#ax2.plot(range(len(pnum)),epnum,c='r',marker='.')
#
##bb = plt.hist(pnum.flatten())
#print(pnum.mean())
#a = np.histogram(pnum.flatten())
##from scipy import stats
#pnum[pnum<3754]=0
#plt.plot(range(len(pnum)),pnum,c='r',marker='.')實時版本結果如下:

高精度版本程式碼如下:(做了部分資料處理)
# -*- coding: utf-8 -*-
"""
Created on Tue Sep 4 13:16:11 2018
@author: Lenovo
"""
import numpy as np
from matplotlib import animation
import matplotlib.pyplot as plt
import cv2
import time
from scipy.fftpack import fft,ifft
cap = cv2.VideoCapture('WIN_20180831_13_49_39_Pro.mp4')
pnum= list()
pnum.append(360)
plt.close() #clf() # 清圖 cla() # 清座標軸 close() # 關視窗
fig=plt.figure()
ax=fig.add_subplot(1,1,1)
plt.grid(True) #新增網格
plt.ion() #interactive mode on
i=0
formerimg = np.zeros((720,1280))
iss, frame = cap.read()
s = time.time()
while iss:
i=i+1
iss,img = cap.read()
if iss:
img = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# cv2.imshow("yuantu_gaus",img)
img=cv2.GaussianBlur(img,(5,5),20)
img = np.power(img / 255.0, 1.3)
img = img*255
#ax.hist(img.flatten(),256)
# imghist = np.histogram(img.flatten(),256)[0]
# histmax = np.argmax(imghist).astype(np.uint8)
# img[img>histmax-50]=255
#
# print(img)
# cv2.imshow("huidu",img)
# sobelX = cv2.Sobel(img,cv2.CV_64F,1,0)#x方向的梯度
# sobelX = np.uint8(np.absolute(sobelX))#x方向梯度的絕對值
# img=img*255
sobelY = cv2.Sobel(img,cv2.CV_64F,0,1)#y方向的梯度
sobelY = np.uint8(np.absolute(sobelY))#y方向梯度的絕對值
# cv2.imshow("sobelY",sobelY)
#
# #找到輪廓
# _,contours, hierarchy = cv2.findContours(sobelY,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
# #繪製輪廓
# cv2.drawContours(sobelY,contours,-1,(0,0,255),3)
# #繪製結果
# img=cv2.GaussianBlur(img,(5,5),20)
sobelY = cv2.medianBlur(sobelY,5)
# kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(3, 3))
# sobelY = cv2.morphologyEx(sobelY, cv2.MORPH_OPEN, kernel)
sn = np.histogram(sobelY)[1]
sobelY[sobelY<=sn[0:3].mean()]=0
#
# yi = 0
# ci = 0
# for i in range(sobelY.shape[0]):
# for j in range(sobelY.shape[1]):
# if sobelY[i,j]>0:
# yi=yi+i
# ci=ci+1
ypoint = int(np.where(sobelY>0)[0].mean())
xpoint = int(np.where(sobelY>0)[1].mean())
# img.flags.WRITEABLE =True
img = img/255.0
img[ypoint-200:ypoint+300,xpoint-300:xpoint+300] = np.power(img[ypoint-200:ypoint+300,xpoint-300:xpoint+300], 0.5)
img = img*255
img = np.uint8(np.absolute(img))#y方向梯度的絕對值
# cv2.imshow("local_h",img)
sobelY = cv2.Sobel(img,cv2.CV_64F,0,1)#y方向的梯度
sobelY = np.uint8(np.absolute(sobelY))#y方向梯度的絕對值
# cv2.imshow("local_sobelY",sobelY)
ypoint = np.where(sobelY>0)[0].mean()
xpoint = np.where(sobelY>0)[1].mean()
if np.absolute(ypoint-pnum[-1])<=3:
ypoint=pnum[-1]
# cv2.imshow("open",sobelY)
pnum.append(ypoint)
#
# print(i)
#cv2.imshow("result", sobelY)
#
# plt.plot(range(len(pnum)),pnum,c='r',marker='.')
# cv2.imshow("yanjiao",sobelY)
# plt.pause(0.01)
# if cv2.waitKey(1) & 0xFF == 'q':
# break
# time.sleep(0.5)
e=time.time()
print(e-s)
cv2.destroyAllWindows()
plt.plot(range(len(pnum)),pnum,c='r',marker='.')
#
#fig=plt.figure('22')
#ax2=fig.add_subplot(1,1,1)
#
#epnum = np.array(pnum)
#avg = epnum.mean()
#s=0
#countt=0
#for i in epnum:
# if i> avg:
# s=s+i
# countt=countt+1
#avg = s/countt
#print(avg)
#epnum[epnum<avg]=0
ax.plot(range(len(pnum)),pnum,c='r',marker='.')
#
##bb = plt.hist(pnum.flatten())
#print(pnum.mean())
#a = np.histogram(pnum.flatten())
##from scipy import stats
#pnum[pnum<3754]=0
#plt.plot(range(len(pnum)),pnum,c='r',marker='.')
目前基於SOBEL的方法就告一段落。接下來嘗試一下 有沒有其他辦法能做更好的處理。
最近閱讀了一些文獻,有一些新的感悟,接下來,也嘗試嘗試
1.y向差分投影


按照論文中這個思路來的話,對眼部區域定位應該不錯,如果我能做到眼部區域定位,再去做區域內運算的話,能去除掉大量噪聲干擾。
該方法在眼部未閉合的時候,效果較好,眼部閉合就會一團糟,應為方差趨於穩定了。
# -*- coding: utf-8 -*-
"""
Created on Tue Sep 4 13:16:11 2018
@author: xkk
"""
import numpy as np
from matplotlib import animation
import matplotlib.pyplot as plt
import cv2
import time
from scipy.fftpack import fft,ifft
cap = cv2.VideoCapture('WIN_20180903_16_06_34_Pro.mp4')
pnum= list()
pnum.append(300)
plt.close() #clf() # 清圖 cla() # 清座標軸 close() # 關視窗
fig=plt.figure()
ax=fig.add_subplot(1,1,1)
plt.grid(True) #新增網格
plt.ion() #interactive mode on
i=0
formerimg = np.zeros((720,1280))
iss, frame = cap.read()
s = time.time()
while iss:
i=i+1
iss,img = cap.read()
if iss:
img = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
cv2.imshow("yuantu_gaus",img)
limg = img[:,1:]
rimg = img[:,:-1]
dimg = np.sum(np.power(rimg-limg,2),axis=1)
dimg = dimg.flatten()
#plt.hist(dimg,1000)
# pnum.append(ypoint)
plt.plot(range(len(dimg)),dimg,c='r',marker='.')
plt.pause(0.2)
plt.clf()
if cv2.waitKey(1) & 0xFF == 'q':
break
time.sleep(0.5)效果如下:

同理,結合了y軸就可以做眼部追蹤了。

但是還是在閉眼的一瞬間會出現漂移。如何找到閉眼特徵成為很重要的事情了。

之後我們對影象進行sobel邊緣提取,只做y軸方向sobel,接下來,我們可用質點的思路做檢測,但是上面已經做過了,效果較好,但是抖動較大,這裡考慮嘗試新的思路,基於區域的畫素分佈均勻度,即 熵 ,來做。
感覺效果也不行,不穩定。
嘗試一下 基於灰度相似度的方法,對模板匹配方法的改進,歸一化積相關灰度匹配。
它使用的相似性度量定義如下:

這方法受眼部位置影響太大,人體本身就會產生抖動,導致R值幅度波動大。
看到一些論文用YCBCR基於膚色分類,對於白天光照充足的情況下,效果理想
對於夜晚 或者人體抖動,產生的干擾,效果就不好了

具體過程如下

-----------------------------------------
縱向灰度加和圖


# -*- coding: utf-8 -*-
"""
Created on Tue Sep 4 13:16:11 2018
@author: xkk
"""
import numpy as np
from matplotlib import animation
import matplotlib.pyplot as plt
import cv2
import time
from scipy.fftpack import fft,ifft
cap = cv2.VideoCapture('WIN_20180903_16_06_34_Pro.mp4')
pnum= list()
pnum.append(300)
plt.close() #clf() # 清圖 cla() # 清座標軸 close() # 關視窗
fig=plt.figure()
ax=fig.add_subplot(1,1,1)
plt.grid(True) #新增網格
plt.ion() #interactive mode on
i=0
formerimg = np.zeros((720,1280))
iss, frame = cap.read()
s = time.time()
while iss:
i=i+1
iss,img = cap.read()
if iss:
img = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
cv2.imshow("yuantu_gaus",img)
dimg = np.sum(img,axis=0)
dimg = dimg.flatten()
#plt.hist(dimg,1000)
# pnum.append(ypoint)
plt.plot(range(len(dimg)),dimg,c='r',marker='.')
plt.pause(0.01)
plt.clf()
if cv2.waitKey(1) & 0xFF == 'q':
break
time.sleep(0.5)回YCBCR,發現效果是真的好,但是就是這個分割閾值難以確定
import cv2
import numpy as np
import pylab as pl
from PIL import Image
import matplotlib.pyplot as plt
import time
pnum= list()
#構建Gabor濾波器
def build_filters():
filters = []
ksize = [7,9,11,13,15,17] #gabor尺度 6個
lamda = np.pi/2.0 # 波長
kern = cv2.getGaborKernel((15,15),1,np.pi/2,lamda,0.5,0,ktype=cv2.CV_32F)
kern /= 1.5*kern.sum()
filters.append(kern)
return filters
#濾波過程
def process(img,filters):
accum = np.zeros_like(img)
for kern in filters:
fimg = cv2.filter2D(img,cv2.CV_8UC3,kern)
np.maximum(accum,fimg,accum)
return accum
#特徵圖生成並顯示
def getGabor(img,filters):
res = [] #濾波結果
for i in range(len(filters)):
res1 = process(img,filters[i])
res.append(np.asarray(res1))
return res
if __name__ == '__main__':
cap = cv2.VideoCapture('WIN_20180831_13_49_39_Pro.mp4')
filters = build_filters()
iss=True
while iss:
iss,img = cap.read()
if iss:
# edgeimg = getGabor(img,filters)[0]
edgeimg = cv2.cvtColor(img,cv2.COLOR_BGR2YCR_CB)
cv2.imshow("grayedgeimg",edgeimg)
cv2.imshow("grayedgeimg_0",edgeimg[:,:,0])
cr = edgeimg[:,:,1]
cb = edgeimg[:,:,2]
#一共有多少畫素點
allp = cr.shape[0]*cr.shape[1]
ninetyp = int(allp*0.2)
divgray = cr.mean()
# sn = np.histogram(cr,255)
# for i in range(255):
# ninetyp = ninetyp - sn[0][i]
# if ninetyp<=0:
# divgray=i
# break
print(divgray)
cr_hist = np.histogram(cr.flatten())
cr[cr<150]=255
# kernel = np.ones((15,15),np.uint8)
# cr = cv2.erode(cr,kernel,iterations = 1)
cv2.imshow("grayedgeimg_2-1",cr)
ypoint = np.where(cr==255)[0].mean()
pnum.append(ypoint)
plt.plot(range(len(pnum)),pnum,c='r',marker='.')
# yc = cr[:-1,:]-cr[1:,:]
# cr_sumhang = np.sum(np.power(yc,2),axis=1)
# plt.plot(range(len(cr_sumhang.flatten())),cr_sumhang.flatten())
plt.pause(0.0001)
plt.clf()
# time.sleep(0.1)
if cv2.waitKey(1) & 0xFF == 'q':
break

試了一下otsu和adaptivethresh 效果都不行,otsu勉強能看
用攝像頭實際測量一下YCBCR方法,感覺光線影響太大
後來發現- -,迴歸樸素方法,otsu+質點預測 就能達到還不錯的效果。
import cv2
import numpy as np
import pylab as pl
from PIL import Image
import matplotlib.pyplot as plt
import time
pnum= list()
#構建Gabor濾波器
def build_filters():
filters = []
ksize = [7,9,11,13,15,17] #gabor尺度 6個
lamda = np.pi/2.0 # 波長
kern = cv2.getGaborKernel((15,15),1,np.pi/2,lamda,0.5,0,ktype=cv2.CV_32F)
kern /= 1.5*kern.sum()
filters.append(kern)
return filters
#濾波過程
def process(img,filters):
accum = np.zeros_like(img)
for kern in filters:
fimg = cv2.filter2D(img,cv2.CV_8UC3,kern)
np.maximum(accum,fimg,accum)
return accum
#特徵圖生成並顯示
def getGabor(img,filters):
res = [] #濾波結果
for i in range(len(filters)):
res1 = process(img,filters[i])
res.append(np.asarray(res1))
return res
if __name__ == '__main__':
cap = cv2.VideoCapture(0)
filters = build_filters()
iss=True
while iss:
iss,img = cap.read()
if iss:
# edgeimg = getGabor(img,filters)[0]
edgeimg = cv2.cvtColor(img,cv2.COLOR_BGR2YCR_CB)
cv2.imshow("grayedgeimg",edgeimg)
cv2.imshow("grayedgeimg_0",edgeimg[:,:,0])
cr = edgeimg[:,:,1]
cb = edgeimg[:,:,2]
#一共有多少畫素點
allp = cr.shape[0]*cr.shape[1]
ninetyp = int(allp*0.2)
divgray = cr.mean()
# sn = np.histogram(cr,255)
# for i in range(255):
# ninetyp = ninetyp - sn[0][i]
# if ninetyp<=0:
# divgray=i
# break
print(divgray)
cr_hist = np.histogram(cr.flatten())
cr[cr<cr.mean()-cr.std()]=255
retval, cr = cv2.threshold(cr, 0, 255, cv2.THRESH_OTSU)
kernel = np.ones((10,10),np.uint8)
cr = cv2.erode(cr,kernel,iterations = 1)
cr = cv2.dilate(cr,kernel,iterations = 1)
cv2.imshow("grayedgeimg_2-1",cr)
ypoint = np.where(cr==255)[0].mean()
if len(pnum)>200:
pnum.clear()
pnum.append(ypoint)
plt.plot(range(len(pnum)),pnum,c='r',marker='.')
# yc = cr[:-1,:]-cr[1:,:]
# cr_sumhang = np.sum(np.power(yc,2),axis=1)
# plt.plot(range(len(cr_sumhang.flatten())),cr_sumhang.flatten())
plt.pause(0.0001)
plt.clf()
# time.sleep(0.1)
if cv2.waitKey(1) & 0xFF == 'q':
break
----------------------------------
接下來試試 神經網路 / 機器學習