
Windows10下VS2013+PCL1.8環境配置
剛換了機子配PCL,Windows下配環境實在是太蛋疼了,上次沒有記錄配置的過程,所以又得各種搜教程,關鍵是很多部落格上寫的教程都不對啊!!!不知道寫出一個不對的配置方法給人看是怎樣的一種心態。。這次一定要詳細記下來:
配置過程
1.下載安裝PCL
下載PCL-1.8.0-AllInOne-msvc2013-win64並安裝,一直下一步就好。注意:中途會彈出安裝OpenNI的框,我們將OpenNI安裝在PCL安裝目錄下3rdParty\OpenNI2裡。 下載連結:http://pan.baidu.com/s/1hrAhLK4 密碼:1evw
2.配置系統變數:
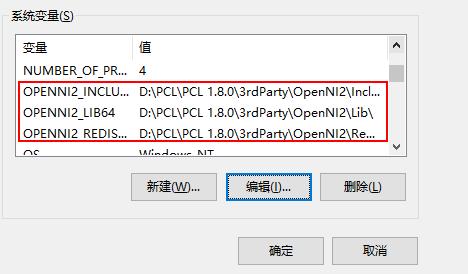
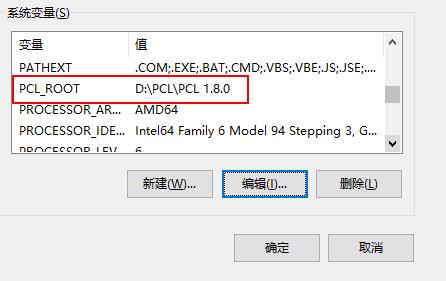
安裝好後,會自動出現如下幾個變數:
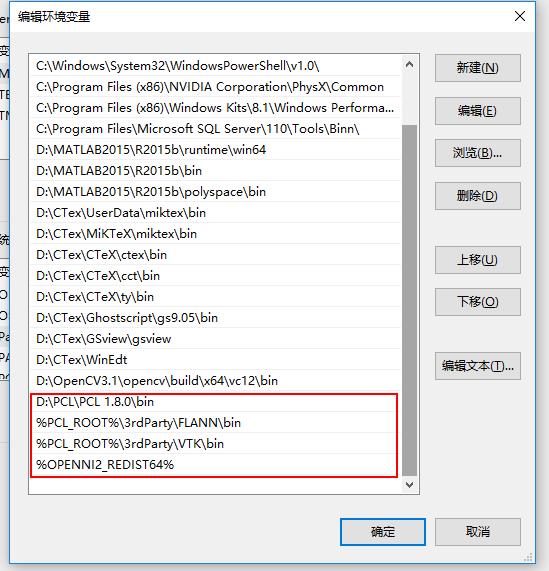
接著,我們需要自己新增如下幾個變數: 首先是path,第一個是安裝完自己加的,我們需要手動新增其他三個:
3.配置專案工程屬性檔案
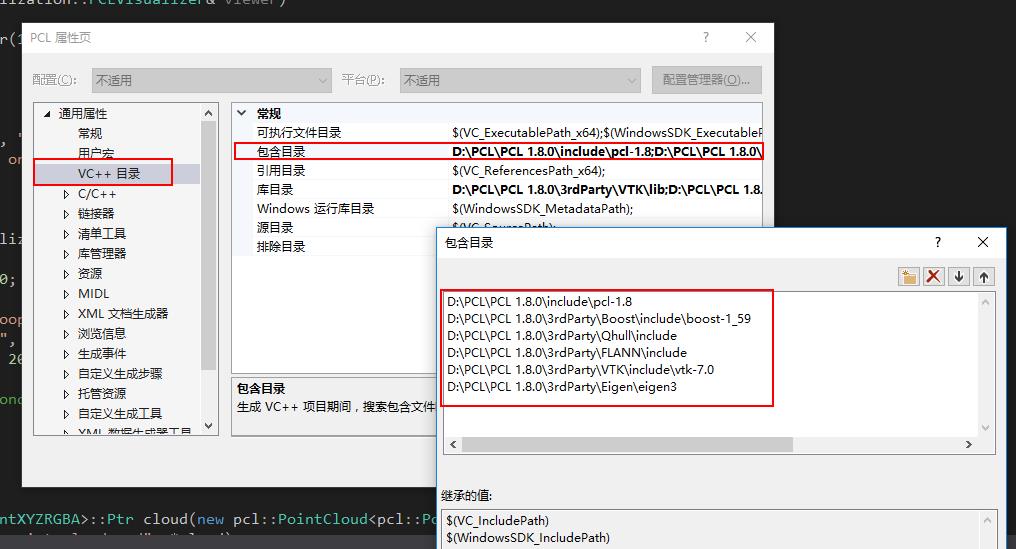
(1)新建一個空專案,將專案設定成64位,這個沒什麼好說的。 (2)切換屬性管理器,在Debug|64下新增新專案屬性表,取名PCL。 左側VC++目錄,包含目錄設定如圖:
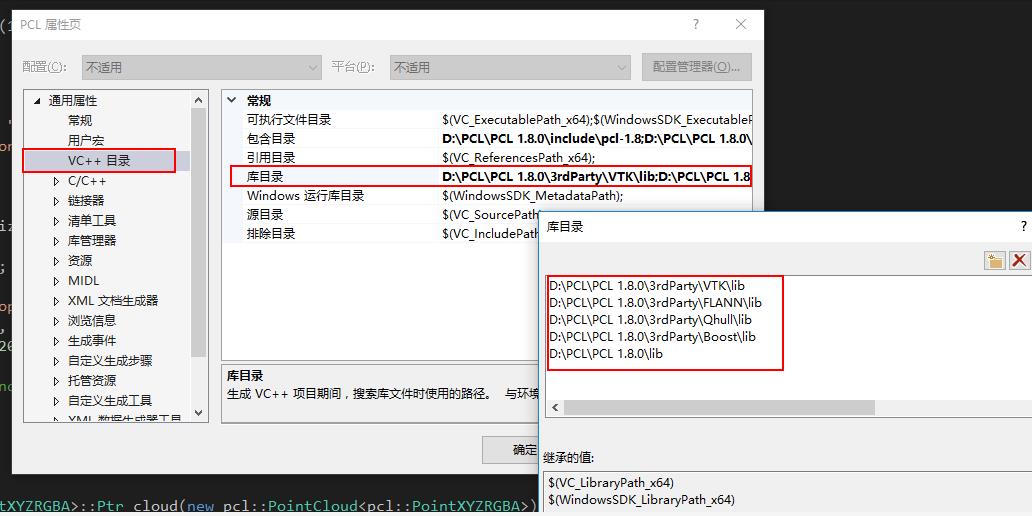
左側VC++目錄,庫目錄設定如圖:
左側鏈接器-輸入,附加依賴項:
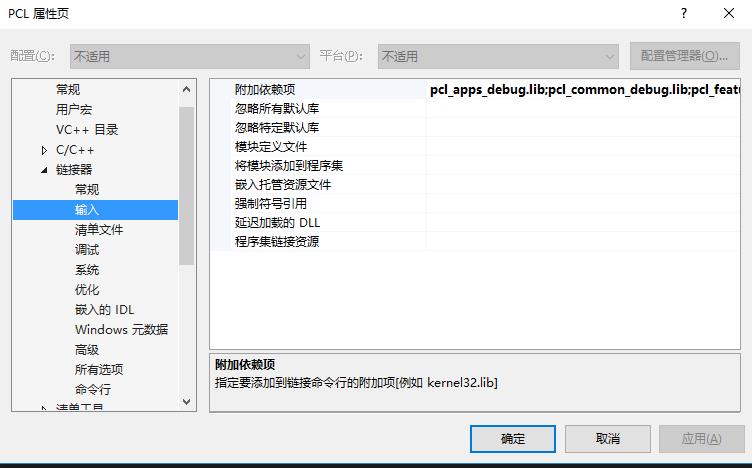
配置如下: pcl_apps_debug.lib pcl_common_debug.lib pcl_features_debug.lib pcl_filters_debug.lib pcl_io_ply_debug.lib pcl_io_debug.lib pcl_kdtree_debug.lib pcl_keypoints_debug.lib pcl_ml_debug.lib pcl_octree_debug.lib pcl_outofcore_debug.lib pcl_people_debug.lib pcl_recognition_debug.lib pcl_registration_debug.lib pcl_sample_consensus_debug.lib pcl_search_debug.lib pcl_segmentation_debug.lib pcl_simulation_debug.lib pcl_stereo_debug.lib pcl_surface_debug.lib pcl_tracking_debug.lib pcl_visualization_debug.lib libboost_atomic-vc120-mt-gd-1_59.lib libboost_chrono-vc120-mt-gd-1_59.lib libboost_container-vc120-mt-gd-1_59.lib libboost_context-vc120-mt-gd-1_59.lib libboost_coroutine-vc120-mt-gd-1_59.lib libboost_date_time-vc120-mt-gd-1_59.lib libboost_exception-vc120-mt-gd-1_59.lib libboost_filesystem-vc120-mt-gd-1_59.lib libboost_graph-vc120-mt-gd-1_59.lib libboost_iostreams-vc120-mt-gd-1_59.lib libboost_locale-vc120-mt-gd-1_59.lib libboost_log-vc120-mt-gd-1_59.lib libboost_log_setup-vc120-mt-gd-1_59.lib libboost_math_c99-vc120-mt-gd-1_59.lib libboost_math_c99f-vc120-mt-gd-1_59.lib libboost_math_c99l-vc120-mt-gd-1_59.lib libboost_math_tr1-vc120-mt-gd-1_59.lib libboost_math_tr1f-vc120-mt-gd-1_59.lib libboost_math_tr1l-vc120-mt-gd-1_59.lib libboost_mpi-vc120-mt-gd-1_59.lib libboost_prg_exec_monitor-vc120-mt-gd-1_59.lib libboost_program_options-vc120-mt-gd-1_59.lib libboost_random-vc120-mt-gd-1_59.lib libboost_regex-vc120-mt-gd-1_59.lib libboost_serialization-vc120-mt-gd-1_59.lib libboost_signals-vc120-mt-gd-1_59.lib libboost_system-vc120-mt-gd-1_59.lib libboost_test_exec_monitor-vc120-mt-gd-1_59.lib libboost_thread-vc120-mt-gd-1_59.lib libboost_timer-vc120-mt-gd-1_59.lib libboost_unit_test_framework-vc120-mt-gd-1_59.lib libboost_wave-vc120-mt-gd-1_59.lib libboost_wserialization-vc120-mt-gd-1_59.lib flann-gd.lib flann_cpp_s-gd.lib flann_s-gd.lib qhull-gd.lib qhullcpp-gd.lib qhullstatic-gd.lib qhullstatic_r-gd.lib qhull_p-gd.lib qhull_r-gd.lib vtkalglib-7.0-gd.lib vtkChartsCore-7.0-gd.lib vtkCommonColor-7.0-gd.lib vtkCommonComputationalGeometry-7.0-gd.lib vtkCommonCore-7.0-gd.lib vtkCommonDataModel-7.0-gd.lib vtkCommonExecutionModel-7.0-gd.lib vtkCommonMath-7.0-gd.lib vtkCommonMisc-7.0-gd.lib vtkCommonSystem-7.0-gd.lib vtkCommonTransforms-7.0-gd.lib vtkDICOMParser-7.0-gd.lib vtkDomainsChemistry-7.0-gd.lib vtkDomainsChemistryOpenGL2-7.0-gd.lib vtkexoIIc-7.0-gd.lib vtkexpat-7.0-gd.lib vtkFiltersAMR-7.0-gd.lib vtkFiltersCore-7.0-gd.lib vtkFiltersExtraction-7.0-gd.lib vtkFiltersFlowPaths-7.0-gd.lib vtkFiltersGeneral-7.0-gd.lib vtkFiltersGeneric-7.0-gd.lib vtkFiltersGeometry-7.0-gd.lib vtkFiltersHybrid-7.0-gd.lib vtkFiltersHyperTree-7.0-gd.lib vtkFiltersImaging-7.0-gd.lib vtkFiltersModeling-7.0-gd.lib vtkFiltersParallel-7.0-gd.lib vtkFiltersParallelImaging-7.0-gd.lib vtkFiltersProgrammable-7.0-gd.lib vtkFiltersSelection-7.0-gd.lib vtkFiltersSMP-7.0-gd.lib vtkFiltersSources-7.0-gd.lib vtkFiltersStatistics-7.0-gd.lib vtkFiltersTexture-7.0-gd.lib vtkFiltersVerdict-7.0-gd.lib vtkfreetype-7.0-gd.lib vtkGeovisCore-7.0-gd.lib vtkglew-7.0-gd.lib vtkGUISupportQt-7.0-gd.lib vtkGUISupportQtSQL-7.0-gd.lib vtkhdf5-7.0-gd.lib vtkhdf5_hl-7.0-gd.lib vtkImagingColor-7.0-gd.lib vtkImagingCore-7.0-gd.lib vtkImagingFourier-7.0-gd.lib vtkImagingGeneral-7.0-gd.lib vtkImagingHybrid-7.0-gd.lib vtkImagingMath-7.0-gd.lib vtkImagingMorphological-7.0-gd.lib vtkImagingSources-7.0-gd.lib vtkImagingStatistics-7.0-gd.lib vtkImagingStencil-7.0-gd.lib vtkInfovisCore-7.0-gd.lib vtkInfovisLayout-7.0-gd.lib vtkInteractionImage-7.0-gd.lib vtkInteractionStyle-7.0-gd.lib vtkInteractionWidgets-7.0-gd.lib vtkIOAMR-7.0-gd.lib vtkIOCore-7.0-gd.lib vtkIOEnSight-7.0-gd.lib vtkIOExodus-7.0-gd.lib vtkIOExport-7.0-gd.lib vtkIOGeometry-7.0-gd.lib vtkIOImage-7.0-gd.lib vtkIOImport-7.0-gd.lib vtkIOInfovis-7.0-gd.lib vtkIOLegacy-7.0-gd.lib vtkIOLSDyna-7.0-gd.lib vtkIOMINC-7.0-gd.lib vtkIOMovie-7.0-gd.lib vtkIONetCDF-7.0-gd.lib vtkIOParallel-7.0-gd.lib vtkIOParallelXML-7.0-gd.lib vtkIOPLY-7.0-gd.lib vtkIOSQL-7.0-gd.lib vtkIOVideo-7.0-gd.lib vtkIOXML-7.0-gd.lib vtkIOXMLParser-7.0-gd.lib vtkjpeg-7.0-gd.lib vtkjsoncpp-7.0-gd.lib vtklibxml2-7.0-gd.lib vtkmetaio-7.0-gd.lib vtkNetCDF-7.0-gd.lib vtkNetCDF_cxx-7.0-gd.lib vtkoggtheora-7.0-gd.lib vtkParallelCore-7.0-gd.lib vtkpng-7.0-gd.lib vtkproj4-7.0-gd.lib vtkRenderingAnnotation-7.0-gd.lib vtkRenderingContext2D-7.0-gd.lib vtkRenderingContextOpenGL2-7.0-gd.lib vtkRenderingCore-7.0-gd.lib vtkRenderingFreeType-7.0-gd.lib vtkRenderingImage-7.0-gd.lib vtkRenderingLabel-7.0-gd.lib vtkRenderingLOD-7.0-gd.lib vtkRenderingOpenGL2-7.0-gd.lib vtkRenderingQt-7.0-gd.lib vtkRenderingVolume-7.0-gd.lib vtkRenderingVolumeOpenGL2-7.0-gd.lib vtksqlite-7.0-gd.lib vtksys-7.0-gd.lib vtktiff-7.0-gd.lib vtkverdict-7.0-gd.lib vtkViewsContext2D-7.0-gd.lib vtkViewsCore-7.0-gd.lib vtkViewsInfovis-7.0-gd.lib vtkViewsQt-7.0-gd.lib vtkzlib-7.0-gd.lib
上邊的包含目錄,庫目錄按你自己的來,附加依賴項有些庫版本不同,不同的建議去搜其他的。。
專案環境目錄配置
右鍵解決方案,屬性,左側配置屬性–除錯,右側環境設定為: PATH=$(PCL_ROOT)\bin;$(PCL_ROOT)\3rdParty\FLANN\bin;$(PCL_ROOT)\3rdParty\VTK\bin ;$(PCL_ROOT)\Qhull\bin;$(PCL_ROOT)\3rdParty\OpenNI2\Tools;$(PATH) (為了好顯示我這裡換了一下行,你就不用換行了,一行放進去,可以的!)
測試一下
新建一個cpp檔案,輸入下列程式碼:
#include <pcl/visualization/cloud_viewer.h> #include <iostream> #include <pcl/io/io.h> #include <pcl/io/pcd_io.h> int user_data; void viewerOneOff(pcl::visualization::PCLVisualizer& viewer) { viewer.setBackgroundColor(1.0, 0.5, 1.0); pcl::PointXYZ o; o.x = 1.0; o.y = 0; o.z = 0; viewer.addSphere(o, 0.25, "sphere", 0); std::cout << "i only run once" << std::endl; } void viewerPsycho(pcl::visualization::PCLVisualizer& viewer) { static unsigned count = 0; std::stringstream ss; ss << "Once per viewer loop: " << count++; viewer.removeShape("text", 0); viewer.addText(ss.str(), 200, 300, "text", 0); //FIXME: possible race condition here: user_data++; } int main() { pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGBA>); pcl::io::loadPCDFile("my_point_cloud.pcd", *cloud); pcl::visualization::CloudViewer viewer("Cloud Viewer"); //blocks until the cloud is actually rendered viewer.showCloud(cloud); //use the following functions to get access to the underlying more advanced/powerful //PCLVisualizer //This will only get called once viewer.runOnVisualizationThreadOnce(viewerOneOff); //This will get called once per visualization iteration viewer.runOnVisualizationThread(viewerPsycho); while (!viewer.wasStopped()) { //you can also do cool processing here //FIXME: Note that this is running in a separate thread from viewerPsycho //and you should guard against race conditions yourself... user_data++; } return 0; }
執行之後出現影象,滑鼠滾輪可以調大小,能看到一個球證明你成功了! 好了,把那個屬性檔案儲存出來,每次用的時候在新建專案裡匯入就可以了……