
TensorFlow的圖切割模組——Graph Partitioner
阿新 • • 發佈:2018-12-16
背景
[作者: DeepLearningStack,阿里巴巴演算法工程師] 在經過TensorFlow的 Placer策略模組調整之後,下一步就是根據Placement資訊對Graph做切割,然後分發到不同的Device上去執行的過程了。在對Graph做切割時,為了保證跨Device執行的邏輯與切割前一致並保證原圖中Node節點之間的依賴關係不受到破壞,不但需要插入Send、Recv通訊節點對,還需要維護相對複雜的Control Edge。這些功能被設計在了TensorFlow的Graph Partitioner模組中。從該模組的程式碼量和原理上看,其內容非常好理解,但在涉及到對含有while_loop、loop_contition、exit、enter、merge、switch等Control Flow Op的圖做切割時,其處理就顯得相對複雜。本篇主要介紹Graph Partitioner的整體過程和相關原始碼,但考慮到Control Flow Op相關的處理還需要一些前置知識,而這些前置知識在TensorFlow原始碼閱讀與架構梳理系列中尚未完成書寫,因此本篇暫時過濾掉對Control Flow Op相關邏輯的處理。功能描述
Graph Partition切割流程
為了描述方便,特意將圖切割過程分為以下幾個子過程,整體流程如下圖所示,圖右邊的文字是對每個過程的簡短描述,本篇我們重點闡述標記為深色的子過程。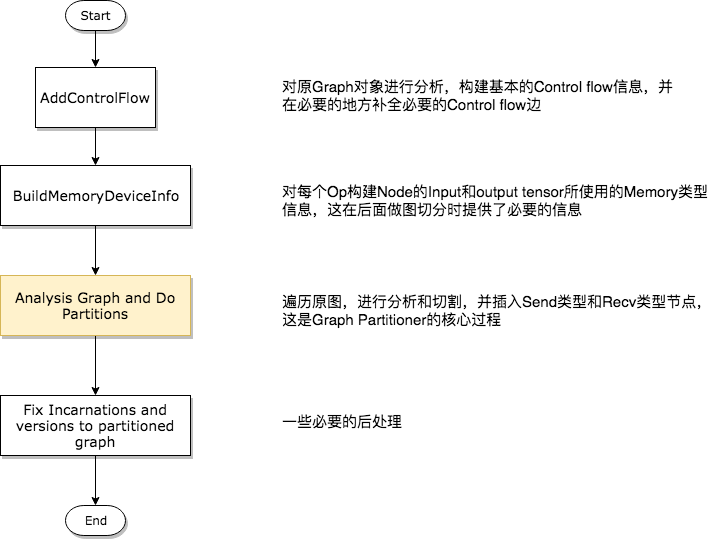
第一步——分析構建Control Flow相關資訊
1 GraphInfo g_info; 2 if (!opts.control_flow_added) { 3 // Add the "code" for distributed execution of control flow. Code is 4 // added only for the frames that are placed on multiple devices. The 5 // new graph is an equivalent transformation of the original graph and 6 // has the property that it can be subsequently partitioned arbitrarily 7 // (down to the level of individual device) for distributed execution. 8 status = AddControlFlow(opts, g, &g_info); 9 if (!status.ok()) return status; 10 }
第二步——構建Op的Input和Output Memory型別資訊
在介紹這個過程之前,首先需要明確兩種概念,他們是DeviceMemory和HostMemory。前者指的是計算裝置的Memory型別,後者指的是CPU的Memory型別,它們在TensorFlow中被定義為Enum型別,程式碼如下所示。1 // MemoryType is used to describe whether input or output Tensors of 2 // an OpKernel should reside in "Host memory" (e.g., CPU memory) or 3 // "Device" Memory (CPU memory for CPU devices, GPU memory for GPU 4 // devices). 5 enum MemoryType { 6 DEVICE_MEMORY = 0, 7 HOST_MEMORY = 1, 8 };對Op的Input和Output Memory資訊進行檢索並構建快取的函式是BuildMemoryDeviceInfo,該過程構建的資訊對後面真正做圖切割非常重要。因為TensorFlow的Op在註冊時需要不但需要指定其在各個Device上的實現版本(比如CPU版本的Op和GPU版本的Op都是分別註冊到系統中的),還需要指出其Input和Output Tensor的型別以及所使用的Memory型別,即使某個Op存在GPU上的實現,它的GPU版本也有可能需要在CPU上讀入資料或輸出結果。例如,GPU版本的Reshape Op註冊程式碼如下。
1 #define REGISTER_GPU_KERNEL(type) \ 2 REGISTER_KERNEL_BUILDER(Name("Reshape") \ 3 .Device(DEVICE_GPU) \ 4 .HostMemory("shape") \ 5 .TypeConstraint<type>("T") \ 6 .TypeConstraint<int32>("Tshape"), \ 7 ReshapeOp); \ 8 REGISTER_KERNEL_BUILDER(Name("Reshape") \ 9 .Device(DEVICE_GPU) \ 10 .HostMemory("shape") \ 11 .TypeConstraint<type>("T") \ 12 .TypeConstraint<int64>("Tshape"), \ 13 ReshapeOp);
上面的巨集顯示,雖然Reshape Op確實在GPU上有註冊的實現版本,但是它依然要使用HostMemory。另外,某些Tensor的型別也決定了其是否可以被放置到Device Memory上,一般情況下float型別的資料對於計算裝置是非常友好的,而String型別就不是這樣,所以在types.cc檔案中規定了一些強制被放在HostMemory的資料型別,如下程式碼所示。
1 bool DataTypeAlwaysOnHost(DataType dt) { 2 // Includes DT_STRING and DT_RESOURCE. 3 switch (dt) { 4 case DT_STRING: 5 case DT_STRING_REF: 6 case DT_RESOURCE: 7 return true; 8 default: 9 return false; 10 } 11 }TensorFlow的設計哲學認為,參與計算的Tensor應該被放在DeviceMemory上,而參與控制的Tensor應該放在HostMemory上。這樣的設計思路雖然有一定道理,但也確實對一些case產生了負面的效能影響。在後面的過程中我們可以看到,Partition過程會根據每個Op的Input和Output Memory型別決定是否插入Send類和Recv類節點對,因此會經常遇到處於同一個Device上的兩個節點也需要插入Send類和Recv類節點對的情況,顯然這有可能帶來效能下降。
第三步——對原圖進行分析,併產出切割後的多個子圖
在面兩個步驟的準備工作完成之後,就可以進行圖切割和Send類、Recv類節點對的插入,以及Control Edge的插入了,這個過程如下圖所示。因為流程圖繪製的比較簡潔,我們將在下面對該圖進行詳細說明。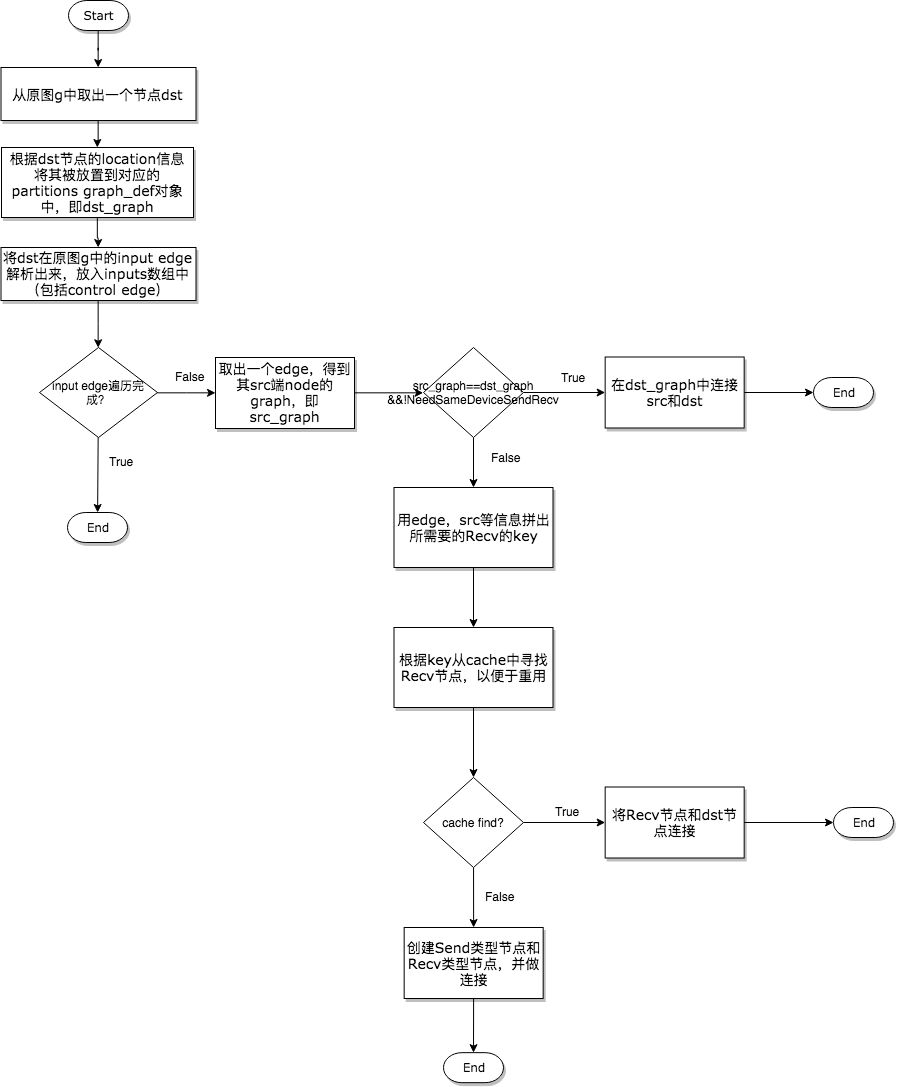 1.將原圖中取出一個節點dst,根據其Device將其分配到對應的Sub Graph中,然後以dst節點為終點節點,沿著其接收Tensor的方向向輸入節點src進行分析;
2.Node之間的連線依靠的是Edge,因此對於dst來說需要根據其Input的Edge來分析src節點的位置,所以這裡要獲得dst的所有Input Edge;
3.在逐個遍歷分析Input Edge時,第一個要處理的就是src和dst處於同一個Device,但依然需要插入Send類和Recv類節點對的情況。根據第二步BuildMemoryDeviceInfo提供的資訊,某些Op的註冊和特殊之處確實會得到這種情況;
4.如果決定需要插入Send類和Recv類節點對,那麼優先考慮是否可以重用Recv節點,如果根據資訊拼出的Key能夠在快取中搜索到該Recv Node,那麼則取出重用。這種Recv Fusion是一種效能優化手段,能避免多次不必要的通訊,真正做到達到一次通訊多次使用的目的,下面的程式碼展示了這一個過程;
1.將原圖中取出一個節點dst,根據其Device將其分配到對應的Sub Graph中,然後以dst節點為終點節點,沿著其接收Tensor的方向向輸入節點src進行分析;
2.Node之間的連線依靠的是Edge,因此對於dst來說需要根據其Input的Edge來分析src節點的位置,所以這裡要獲得dst的所有Input Edge;
3.在逐個遍歷分析Input Edge時,第一個要處理的就是src和dst處於同一個Device,但依然需要插入Send類和Recv類節點對的情況。根據第二步BuildMemoryDeviceInfo提供的資訊,某些Op的註冊和特殊之處確實會得到這種情況;
4.如果決定需要插入Send類和Recv類節點對,那麼優先考慮是否可以重用Recv節點,如果根據資訊拼出的Key能夠在快取中搜索到該Recv Node,那麼則取出重用。這種Recv Fusion是一種效能優化手段,能避免多次不必要的通訊,真正做到達到一次通訊多次使用的目的,下面的程式碼展示了這一個過程;
1 // Check whether there is already a send/recv pair transferring 2 // the same tensor/control from the src to dst partition. 3 const bool on_host = IsDstInputOnHost(edge, g_info); 4 DupRecvKey key{src->id(), edge->src_output(), dst_graph, on_host}; 5 auto iter = dup_recv.find(key); 6 if (iter != dup_recv.end()) { 7 // We found one. Reuse the data/control transferred already. 8 const string& recv_node_name = iter->second.recv->name(); 9 if (edge->IsControlEdge()) { 10 AddInput(dst_def, recv_node_name, Graph::kControlSlot); 11 } else { 12 AddInput(dst_def, recv_node_name, 0); 13 } 14 ref_control_inputs.push_back(recv_node_name); 15 16 // We want the start_time for the recv to be the smallest of the start 17 // times of it's consumers. So we update this whenever we use a recv, 18 // and write it out to the attribute at the end of the subroutine 19 if (iter->second.start_time > recv_start_time) { 20 iter->second.start_time = recv_start_time; 21 } 22 continue; 23 }5.如果快取中沒有找到可重用的節點,那麼只能建立新的Send類和Recv類節點對了。插入通訊節點對時需要考慮多種情況,有時插入Send和Recv節點就能完成任務,有時還需要插入Control Edge以保證依賴順序,有時甚至還要插入一些其他的輔助節點。事實上,分成這三種邏輯處理已經覆蓋任何情況了,後面一章將詳細闡述這三種處理邏輯。 第四步——必要的後處理 這是一些收尾的工作,過程非常簡單,比如完善Send和Recv節點的Incarnation資訊,補全各個子圖的version資訊等,程式碼如下所示。
1 const FunctionLibraryDefinition* flib_def = opts.flib_def; 2 if (flib_def == nullptr) { 3 flib_def = &g->flib_def(); 4 } 5 6 // Set versions, function library and send/recv incarnation. 7 for (auto& it : *partitions) { 8 GraphDef* gdef = &it.second; 9 *gdef->mutable_versions() = g->versions(); 10 // Prune unreachable functions from `flib_def` before adding them to `gdef`. 11 *gdef->mutable_library() = flib_def->ReachableDefinitions(*gdef).ToProto(); 12 13 // Traverse the graph to fill every send/recv op's incarnation 14 // information. 15 SetIncarnation(opts, gdef); 16 }
Send和Recv節點對插入的三種情況
在程式碼中,宣告插入Send和Recv節點的程式碼段非常簡單,如下所示。
1 // Need to split edge by placing matching send/recv nodes on 2 // the src/dst sides of the edge. 3 NodeDef* send = AddSend(opts, g_info, src_graph, edge, send_from, 4 send_start_time, &status); 5 if (!status.ok()) return status; 6 7 NodeDef* real_recv = nullptr; 8 NodeDef* recv = 9 AddRecv(opts, g_info, dst_graph, edge, &real_recv, &status); 10 if (!status.ok()) return status;
但是對於不同的情況卻有著豐富的處理邏輯,所以下面在展示示意圖的同時,會將相關的程式碼段摘出來做展示。
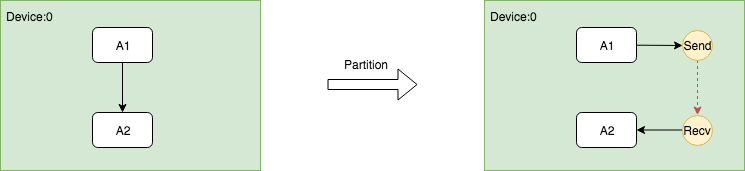
在同一個Device上插入Send和Recv節點對
因為同一個Device上的Send和Recv節點在執行過程中實際上Memory Copy,而Recv的kernel又是非同步的,所以需要有一種機制保證保證Recv一定要在Send之後執行,因此需要在Send和Recv之間插入一個Control Edge,從圖的依賴上保證它們的執行順序。
這個過程的關鍵是在插入Send和Recv節點之後,需要插入額外的Control Edge,程式碼如下。
// Fix up the control flow edge. // NOTE(yuanbyu): 'real_recv' must be the real recv node. if (src_graph == dst_graph) { // For same device send/recv, add a control edge from send to recv. // This prevents the asynchronous recv kernel from being scheduled // before the data is available. AddInput(real_recv, send->name(), Graph::kControlSlot); }
跨Device根據DataFlow插入Send和Recv節點對
這是最容易理解的一種情況,Send節點需要插入到和src節點相同的Device上,Recv需要插入到和dst節點相同的Device上。並且為了減少不必要的通訊開銷,儘可能的重用Recv節點。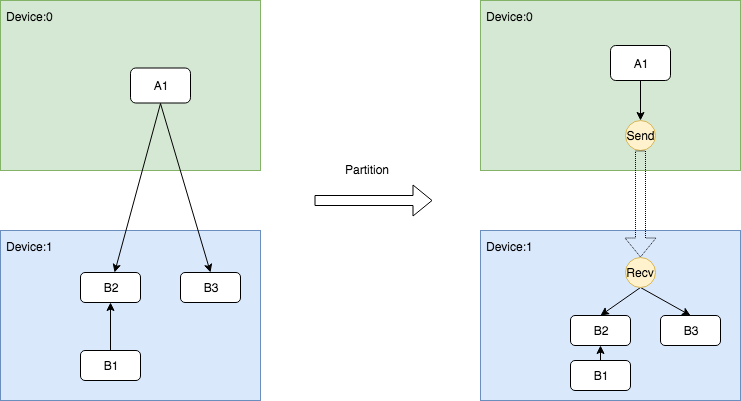 該過程的關鍵在於複用Recv節點,前面在獲取快取時已經闡述過,這裡不重複展示。
該過程的關鍵在於複用Recv節點,前面在獲取快取時已經闡述過,這裡不重複展示。
跨Device根據ControlFlow插入Send和Recv節點對
當存在跨Device的Control Flow依賴時,問題變得相對複雜。因為Control Edge只是用作控制,它並不傳輸真正的Tensor,但在跨Device的情況下,必須要向dst所在的Device傳送訊息,讓其知曉存在依賴控制。TensorFlow選擇傳送DummyConst的方式通知dst節點,具體而言,需要在src的Device上插入shape為0的DummyConst節點,然後將其作為Send的唯一輸入,並將src節點作為它的Control Dependncy。另一方面,在dst的Device上插入Recv節點之後,還需要插入一個identity節點負責讀取傳送來的DummyConst,然後將Indentity作為dst的Control Dependency。如此一來,這種跨Device的依賴關係就可以被完全等價的表示出來。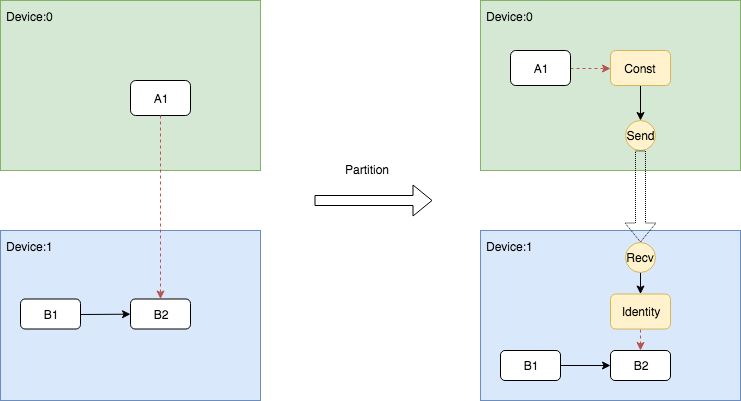 這個過程的關鍵在於src端的DummyConst插入和dst端的Identity插入,這兩部分的邏輯處理寫在了兩個地方。DummyConst和相關控制依賴的程式碼如下。
這個過程的關鍵在於src端的DummyConst插入和dst端的Identity插入,這兩部分的邏輯處理寫在了兩個地方。DummyConst和相關控制依賴的程式碼如下。
1 NodeDefBuilder::NodeOut send_from; 2 if (edge->IsControlEdge()) { 3 // Insert a dummy const node that will generate a tiny 4 // data element to be sent from send to recv. 5 VLOG(1) << "Send/Recv control: " << src->assigned_device_name() << "[" 6 << src->name() << "] -> " << dst->assigned_device_name() << "[" 7 << dst->name() << "]"; 8 NodeDef* dummy = AddDummyConst(opts, src_graph, edge, &status); 9 if (!status.ok()) return status; 10 // Set the start time for this dummy node. 11 if (opts.scheduling_for_recvs) { 12 AddNodeAttr("_start_time", send_start_time, dummy); 13 } 14 AddInput(dummy, src->name(), Graph::kControlSlot); 15 send_from.Reset(dummy->name(), 0, DT_FLOAT); 16 } else { 17 send_from.Reset(src->name(), edge->src_output(), EdgeType(edge)); 18 }
Indentity即相關依賴的插入邏輯被寫在了AddRecv中,下面展示了這個片段。
1 // Add the cast node (from cast_dtype to dtype) or an Identity node. 2 if (dtype != cast_dtype) { 3 const string cast_op = (host_memory) ? "_HostCast" : "Cast"; 4 NodeDefBuilder cast_builder(opts.new_name(src->name()), cast_op); 5 cast_builder.Attr("DstT", dtype); 6 cast_builder.Device(dst->assigned_device_name()) 7 .Input(recv->name(), 0, cast_dtype); 8 NodeDef* cast = gdef->add_node(); 9 *status = cast_builder.Finalize(cast); 10 if (!status->ok()) return nullptr; 11 return cast; 12 } else if (edge->IsControlEdge()) { 13 // An Identity is only needed for control edges. 14 NodeDefBuilder id_builder(opts.new_name(src->name()), "Identity"); 15 id_builder.Device(dst->assigned_device_name()) 16 .Input(recv->name(), 0, cast_dtype); 17 NodeDef* id = gdef->add_node(); 18 *status = id_builder.Finalize(id); 19 if (!status->ok()) return nullptr; 20 return id; 21 } else { 22 return recv; 23 }
關於使用bfloat16壓縮通訊
TensorFlow支援通過使用bfloat16減少通訊量,雖然bfloat16理論上是有損精度的,但是大量的實踐證明這個精度損失是基本感知不到的。bfloat16的通訊功能可以通過以下配置項開啟,只要在建立Session時傳入開啟該功能的config即可。
graph_options = tf.GraphOptions(enable_bfloat16_sendrecv=True) session_config = tf.ConfigProto(gpu_options=gpu_options)而TensorFlow在底層插入bfloat的轉換節點就是在Graph Partitioner的AddSend函式和AddRecv函式中插入的,但是這個轉換隻會在跨Device的Send和Recv前後插入,這也非常符合邏輯,因為處於同一個Device的Send和Recv本質上是本地的Memory Copy,其頻寬非常高,所以通訊並不是瓶頸,而插入兩個轉換節點只能帶來額外的轉換開銷。