
[Ubuntu]Ubuntu中安裝配置ROS
阿新 • • 發佈:2018-12-18
系統:Ubuntu 16.04
Ros系統:kinetic
步驟:
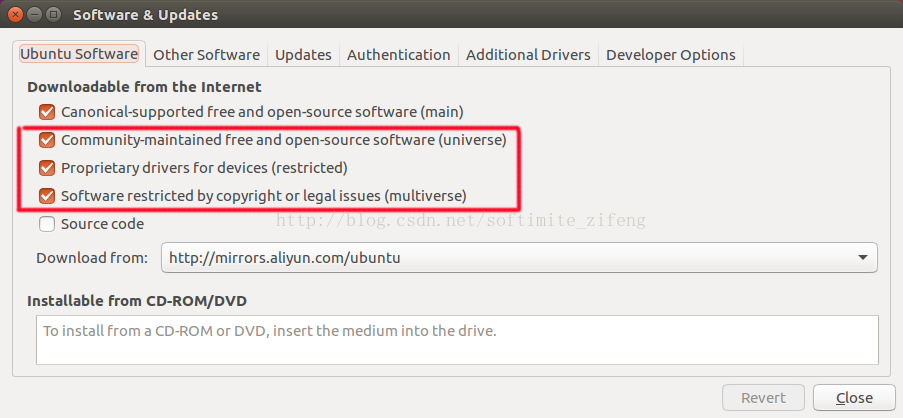
(1)配置Ubuntu的資源庫:"restricted","universe"和"multiverse"。一般情況是不用配置的,參考下圖紅色框部分。 如果沒有配置,可以參考Ubuntu官網:點選開啟連結
(2)設定Ubuntu的sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'(3)設定key
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
(4)更新package
sudo apt-get update(5)安裝ROS kinetic完整版
sudo apt-get install ros-kinetic-desktop-full安裝完可以檢視可用的package:
apt-cache search ros-kinetic(6)初始化rosdep:在使用ROS之前必須要初始化rosdep
sudo rosdep init
rosdep update(7)配置環境
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc source ~/.bashrc
(8)安裝building package的依賴
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential(9)測試ROS安裝成功:
開啟Termial,輸入以下命令,初始化ROS環境:
roscore開啟新的Termial,輸入以下命令,彈出一個小烏龜視窗:
rosrun turtlesim turtlesim_node