
西交大專案設計實驗報告(自動化系)
0 專案設計概述
開發資料百度雲網址:http://yun.baidu.com/ 開發平臺:win10 Freescale Kinetis K60晶片 IAR EWARM開發環境
一、程式設計軟體的安裝與使用
1.1下載安裝軟體
目前最新的IAR for ARM為v6.30,支援更多的Kinetics系列晶片, 因此我們安裝最新版,避免因為版本太低而出現不相容,甚至出 現異常錯誤的情況
1.2安裝 IAR 詳細過程
1.下載後解壓檔案,開啟目錄,執行安裝檔案:

2.IAR的程式設計介面

相對於Keil For ARM、CodeWarrior 而言,IAR for ARM的程式設計介面是最簡單的,編譯效率高,在嵌入式系統的除錯方面提供了可供除錯的外掛。
3.安裝模擬器
又換會原來的安裝導航介面:選擇Install driver,選擇了用jlink作為模擬偵錯程式,因此這裡選擇jlink,執行安裝,執行後,會自動安裝驅動,不會有其他提示。另外,為了可以使用擦除晶片等功能,我們可以選擇用segger 公司的 j-link。

二、模組檢測與除錯
在車輛組裝過程中,因為人為原因,可能出現各個問題,需要在利用一些電氣裝置和程式的情況下,進行模組檢測。在模組檢測時,各個模組間的線,先不插入插座中,待各個模組檢測完後,在按照說明連線線路。
2.1檢測的電源模組。
檢測方法:給電源模組正常供電後,用萬用表測量各個端子的電壓是否正常。具體電壓,雖然電池上寫著是7.2v,但是滿充狀態下電壓是8.3v左右,低於3.5v後,整車不工作。
2.2檢測核心板
核心板的檢測,需要開啟程式碼檢測程式。,用jlink給系統板供電,下載該程式程式碼,程式下載後,核心板上指示燈會閃爍。如果接上串列埠,波特率設定為115200,會不斷的發資料出來。以證明系統版是能夠正常工作的。把系統板插到主機板上。這一步上一屆學長學姐替我們做過啦,所以這步我們只是簡單的點燈看系統版是否正常工作。主機板上的外設通過萬用表可以檢測是否和外設連線正確。
2.3檢測電機驅動
2.3.1程式驗證
下載電機檢測程式[E:\BaiduYunDownload\專案設計\藍宙飛思卡爾資料\藍宙電子智慧車攝像頭套件k60平臺資料-更新至20130601\03藍宙電子智慧車競賽單電機驅動BTS7960資料\藍宙電子智慧車競賽單電機驅動BTS7960資料\landzoK60單電機檢測程式],連線好電源線和驅動線。檢視電機是否正反。可以看到此程式包含電機模組的初始化。

與設定佔空比的不同來進行正反轉

我們可以檢視電機模組說明書[E:\BaiduYunDownload\專案設計\前三節PPT\2 姚向華]電機使用隔離晶片5V電源(可以與微控制器共用5V);微控制器到驅動模組用4跟線即可(GND、5V、PWM1、PWM2);最大頻率支援15KHz,超過會造成晶片發燙、電機運轉不正常。


FTM_PWM_init(FTM0 , CH1, 80000,0); //功能定時器模組 通道號 頻率 佔空比
FTM_PWM_init(FTM0 , CH2, 80000,0);
使用的是FIM0與CH1,CH2對應的引腳號為PTC2與PTC3。
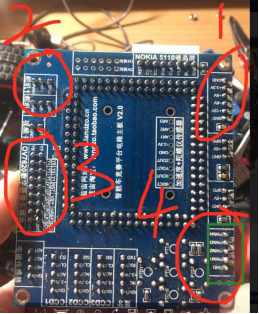
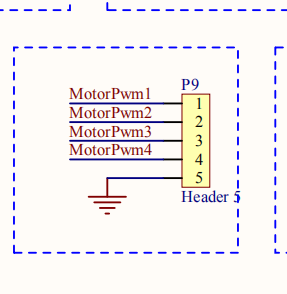
開啟主機板的原理圖 [E:\BaiduYunDownload\專案設計\藍宙 飛思卡爾資料\藍宙電子智慧車攝像頭套件k60平臺資料-更新至20130601\01藍宙電子智慧車MK60主機板資料\藍宙電子智慧車MK60主機板資料] 裡的主機板原理圖,看到PTC2與PTC3正好對應著MotorPwm2和MotorPwm4,也就是電機驅動的PWM波。

2.3.2電路連線
如果認為這個猜想不正確,那麼可以繼續驗證一下,我們可以看到主機板的背面,
FTM_PWM_Duty(FTM0 , CH1,0);
FTM_PWM_Duty(FTM0 , CH2,50);
01是正傳,10是反轉,00與11都是制動,有人也許會說這個正反轉和上面的真值表有所不同,是這樣,有些車就是01正傳,10反轉,試一下就知道。

2.3.3 PCB與對應引腳
開啟主機板的原理圖 [E:\BaiduYunDownload\專案設計\藍宙 飛思卡爾資料\藍宙電子智慧車攝像頭套件k60平臺資料-更新至20130601\01藍宙電子智慧車MK60主機板資料\藍宙電子智慧車MK60主機板資料] 裡的主機板原理圖,看到PCB電路圖中

2.4檢測舵機和舵機對正
機械安裝好後,先把舵機上面的黑色小圓盤從舵機上拔出來。改裝舵接的連線線,舵連線線的改裝方法參考主機板原理圖。把舵機連線線插入主機板上,下載舵機測試程式,舵機測試程式會讓舵機左右轉動。如果舵機能夠正常工作,下載舵機對中程式,讓舵機對中,安裝上黑色小圓,說完這些是不是不知道我在說什麼,好我們回到電機除錯的思路來。
2.4.1 舵機概述
首先看一下舵機的材料 [E:\BaiduYunDownload\專案設計\前三節PPT\2 姚向華] : 一組減速齒輪; 電源線:一般為4.8v或6v。一般為紅色; 地線:一般為黑色 控制線:週期是20ms(也就是50HZ)的脈寬調製(PWM)訊號 (FUTABA為白色) 脈衝寬度從0.5ms-2.5ms,相對應舵盤的位置為0-180度,呈線性變化。從這裡可以得到佔空比從0.5/50-2.5/50,也就是2.5%到12.5%。 重點是,控制線提供一定的脈寬,它的輸出軸就會保持在一個相對應的角度上,直到給它提供一個另外寬度的脈衝訊號,它才會改變輸出角度到新的對應的位置上。不是說各個佔空比他就一直轉,而是一個佔空比對應一個角度的。
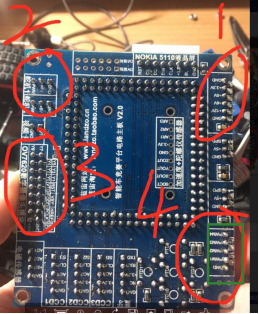
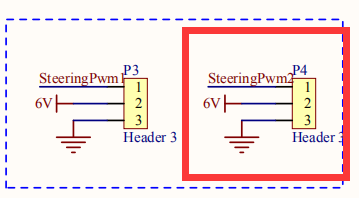
2.4.2 舵機的電路連線
依舊看主機板,可以看到主機板的後面有舵機1與舵機2,我們任意選一個,以舵機1為例。

2.4.3 舵機除錯
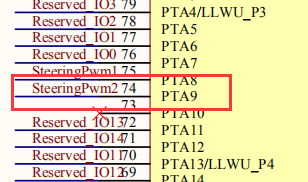
我們回到電機的除錯程式中,看到FTM2與CH1正好對應著PTA9,


在80ms中斷裡,改變舵機的佔空比因此使得舵機向左與向右,由於舵機的佔空比為2.5%-12.5%,5和7是試出來的,一個向左偏,另一個向右偏。

2.4.4 舵機對正
上面的除錯,5%向左偏,7%向右偏。這也告訴我們一個道理,用佔空比除錯比較麻煩,我們可以進入這個函式

FTM_CnV_REG(FTMx[ftmn], ch) = cv來除錯舵機中值。我們把FTM_PWM_Duty(FTM1 , CH1, duty)改成FTM_CnV_REG(FTMx[FTM1], CH1) = cv
根據2分法來除錯舵機中值,cv = 3000時舵機向左轉,cv=4000時舵機向右轉,舵機等於3500時在中間位置,有時候其實3300,3700都可能是中值,因為我們改變的是暫存器的值,不是很敏感,方便除錯舵機。
2.5檢測攝像頭
連線電源線到主機板上,檢視核心板的power燈是否亮著。把攝像頭排線接到主機板上,用萬用表測試一下供電電壓是不是5V。如果供電正常,把排線插到攝像頭上,看攝像頭的指示燈是否亮。用視訊卡檢視,攝像頭的影象。下載攝像頭測試程式,看串列埠是否有采集的AD值輸出。當然我並沒有這樣做,看著燈亮,就覺得就開始除錯啦。畢竟上一屆替我們做過了這些工作。順著以前的思路,我們先看一下,攝像頭的一些資料
2.5.1 攝像頭概述
先看一下攝像頭的基本資料 [E:\BaiduYunDownload\專案設計\前三節PPT\5 王瑩]


2.5.2 攝像頭的連線
這裡我就不細說了,他看PCB圖,

在主機板上找到相應的引腳號

除錯攝像頭就是對這些引腳進行操作。
2.5.3 攝像頭例程
1.Ov7620採集初始化

2.PORTD中斷服務程式

3.DMA中斷服務程式

4.資料搬移

三、專案設計實現
3.1整體框架
到此我們就可以實現我們自己程式裡。我們的流程類似
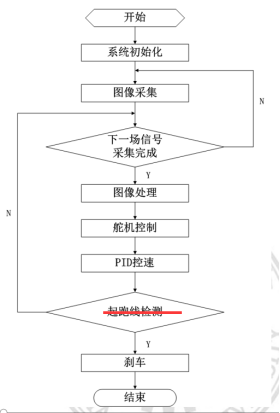
1.在攝像頭程式採集中,只用了10行資料。 2.找黑線,本歷程的找黑執行緒序,是先二值劃,再根據雙線特徵,進行黑線查詢 3.。在用PID演算法,算出轉向 PWM。計算轉向值程式,是需要根據道路的實際情況結合攝像頭前瞻和舵機響應時間,計算出來的值。 4.計算轉向值,根據視覺中心與賽道中心,給舵機一個適當的佔空比,改變舵機角度。 5.速度演算法,需要根據自己賽道是直道和轉彎半徑給出合適的目標車速。還需要對車速響應做出調整,這裡主要是看需要不需要剎車和加速候的 PID 值。 起跑線的檢測我們就不需要了。
3.2初始化
起初我們進行電機,舵機與攝像頭的初始化,程式為:


DMA_PORTx2BUFF_Init (DMA_CH4, (void *)&PTE_BYTE0_IN, ADdata[0], PTD12, DMA_BYTE1, DATACOUNT, DMA_rising_keepon);
DMA_PORTx2BUFF_Init()採用DMA通道4 ,PTE0-PTE7 資料採集,ADdata資料儲存位置,PTD12觸發通道,DMA_BYTE1資料儲存長度1,DATACOUNT資料總個數400,DMA_rising_keepon 觸發方式上升沿。其中DMA_CH4與DMA_BYTE1都是列舉變數。

3.3 攝像頭資料的採集
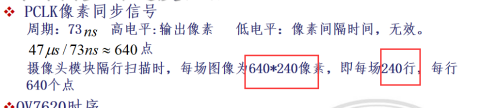
PTD12觸發通道對應著PCLK畫素同步訊號,之前我們說過,每個24行採集一次,總共採集10行結束,就是對應著這個程式。

3.4攝像頭資料的處理
攝像頭的處理包括了影象二值化與尋找黑線,我們的思路與下面的流程圖相符合,不過我們每次都採集10行,因此第一個條件就”採集到的黑線行數>5”不用判斷啦。

3.4.1影象二值化
我們可以設定一個全域性閾值對影象進行簡單的二值化,程式為:

3.4.2尋找黑線與賽道中心
我從影象的中心相兩邊找,如果找到三個連續的點則為黑線。程式為


3.5 PID演算法
在工業控制中,比例+積分+微分的控制規律是一種常用的方法,可適用於多種被控物件。PID調節器是一種線性調節器,它的實質是將設定值r(t)與輸出值c(t)進行比較構成控制偏差 e(t)=r(t)-c(t) 將其按比例、積分、微分運算後,並通過線性組合構成控制量,如圖所示,所以簡稱為P(比例)、I(積分)、D(微分)調節器。
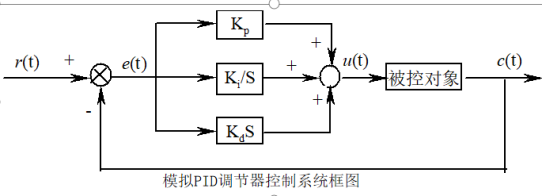
這個誤差我們以視覺中心與賽中中心的距離作為誤差
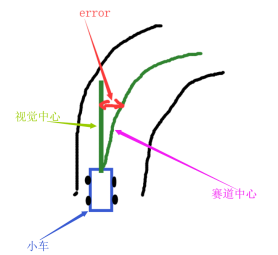

3.6舵機控制
根據視覺中心與賽道中心的誤差來進行舵機的控制,我們很自然的想到,將error放大一定倍數加到舵機中值上,如果每次轉彎的方向是相反的,我們就用舵機中值減去得到的誤差。如下圖所示:

3.7電機控制
此次專案設計,我們的電機佔空比在25%左右,佔空比不是很大,程式如圖

四、總結
此次專案設計到這裡也算告一段落,其中學到了很多,比如熟悉了一下基本環境的搭建,由於例程比較詳細,這裡顯得輕鬆了許多。對於整車的除錯,需要各模組進行,這樣很輕鬆。在一個就是在海量的資訊中找到我們有用的資訊,這個很重要,資訊爆炸的時代,如果對資訊過濾的好,那必然會贏得時代,做一個弄潮兒,可我這種能力有待加強。因為首先是Thomas除錯了程式,告訴了我有用的文件,我在開始開發的。在開發過程中,我也是表現出來極大的陌生感,因為對電路以及硬體除錯的不熟,自己又好高騖遠,不是很情願動手動腦,導致最後開發速度慢,但在其中也學到了,邊看開發文件邊寫程式,邊讀例程,找對應引腳,理清邏輯,邊修改程式,實現自己想要的功能。未來的路還很長,希望自己靜下心來,認認真真做每一件事,要想成功,興趣與堅持,一直要動手,天生聰明,不如每天動手。