
計算機視覺之相機模型推導建立過程
前言:
發呆了一個寒假,在開學之前乾點什麼吧~
歡迎指出文章的不足之處~
//---------------------------------------------------------------------------------------------------------------------------
世界座標系:物體的真實世界座標(三維)
相機座標系:相對於相機建立的座標系(三維)
影象座標系:成像面上以光軸為原點的座標系(二維)
畫素座標系:成像面上以左上角為原點的座標系(二維),注意單位是整形的,因為畫素是一個一個的。
齊次座標:可以簡單的理解成用多一維表示低緯的座標。
例如

x=X/Z
y=Y/Z
一般可以令Z=1,則x=X,y=Y
相機成像的原理就是小孔成像的原理如圖所示。
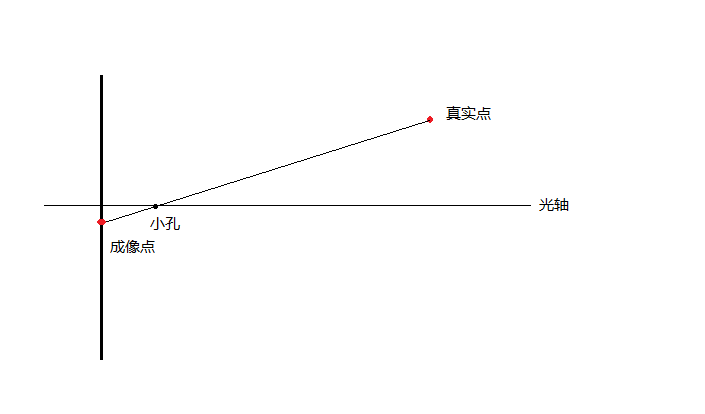
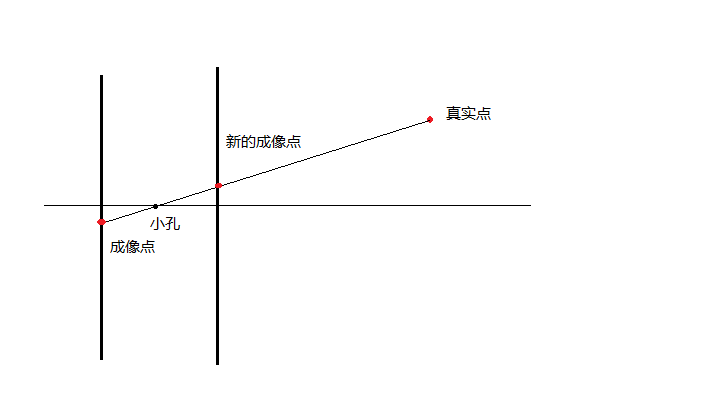
由於小孔成像會導致成像翻轉問題,一般相機都會處理成正立的影象。數學上直接把成像面放置到小孔前面,這樣思考問題會比較簡單,並且結果一致
接下來開始推導相機成像的數學模型,所用到的數學知識也只有相似三角形的知識。
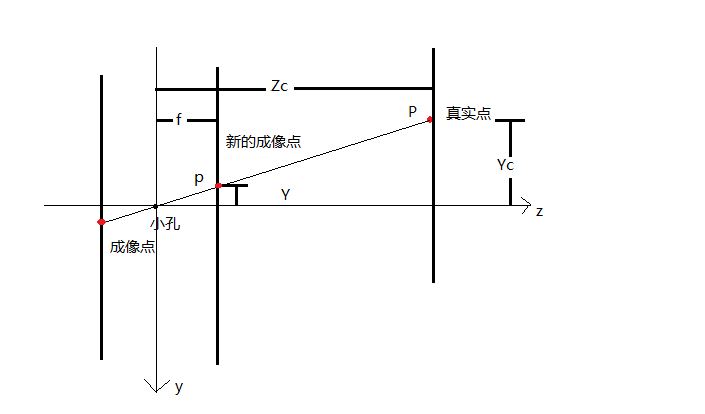
設P(Xc,Yc,Zc),p(X,Y,Z),根據相似三角形的知識,可以得到
X=Xc/Zc*f
Y=Yc/Zc*f
Z=f
到這裡已經把相機座標系轉化到了圖片座標系,但是我們常用的是畫素座標系,所以還要繼續進行轉化。
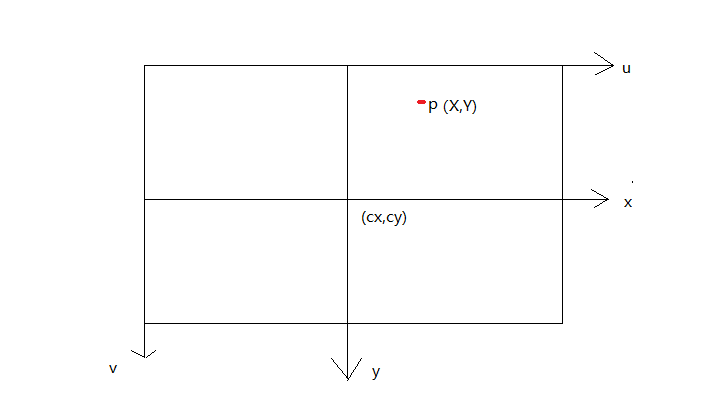
設p點的畫素座標為(u,v),每個畫素塊的寬度是dx,高度是dy(可以將圖片想象成一個矩陣,裡面密集的排列著很多個光感器件,每個光感器件便是一個畫素,光感器件的寬度便是dx,高度便是dy),理想情況下(cx,cy)為影象的中心點,但是由於相機安裝製作過程中會有這樣或那樣的問題,所以一般來說cx,cy不會剛剛好是圖片的中心點。則u-cx=X/dx,v-cy=Y/dy
變形並且帶入之前所推導的結果,可得
u=Xc/Zc*fx+cx
v=Yc/Zc*fy+cy
其中
fx=f/dx
fy=f/dy
將上式子寫成矩陣的形式為
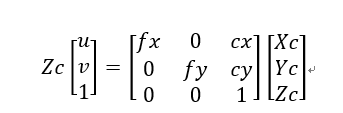
稱矩陣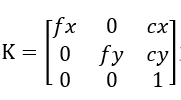
到目前位置,我們所有的一切都是建立在相機座標系上的推導,但是一般來講,世界座標系和相機座標系不會是同一個,我們需要將世界座標系轉換到相機座標系。任何兩個三維座標系之間都只差一個旋轉矩陣R和平移矩陣t,Pc=RPw+t
R是一個3*3的正交矩陣,t是一個3*1的向量。
將R和T寫在一起,並且表示為齊次座標的形式為
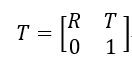
T稱為外引數矩陣,將內外引數矩陣寫在一起
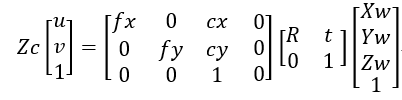
到此便是整個相機模型了,注意有Zc
之後若有興趣可以接著看標定的文章
參考連線:
https://www.cnblogs.com/wangguchangqing/p/8126333.html