
halcon第二十二講:相機標定原理
1、座標系的轉換
1.1 世界座標系
世界座標系(world coordinate)
,也稱為測量座標系,是一個三維直角座標系,以其為基準可以描述相機和待測物體的空間位置。世界座標系的位置可以根據實際情況自由確定。
1.2 相機座標系
相機座標系(camera coordinate)
1.3 世界座標系轉換為相機座標系
相當於求待測物體在相機座標系中的位置,知道了待測物體和相機在世界座標系中的位置,就可以知道待測物體在相機座標系中的位置,轉換關係如下:

1.4相機座標系轉換為影象座標系
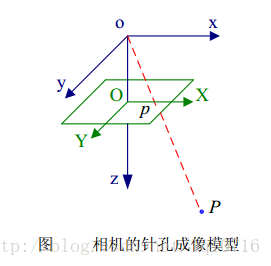
針孔成像原理:以O點為原點建立攝像機座標系。點P(X,Y,Z)為攝像機座標系空間中的一點,該點被光線投影到影象平面上的p(x,y,f)點。影象平面與光軸z軸垂直,和投影中心距離oO為f (f是相機的焦距)。按照三角比例關係可以得出:
x/f = ![]() /Z , y/f =
/Z , y/f = ![]() /Z
/Z
該過程為透視投影,如下矩陣表示:

z為工作距離,即待測物體平面到鏡頭光心的距離,f為焦距。
1.5影象座標系轉換為畫素座標系

畫素座標系(pixel coordinate)
如圖1,畫素座標系u-o-v是一個二維直角座標系,反映了相機CCD/CMOS晶片中畫素的排列情況。原點o位於影象的左上角,u軸、v軸分別於像面的兩邊平行。畫素座標系中座標軸的單位是畫素(整數)。
畫素座標系不利於座標變換,因此需要建立影象座標系x-O-y,其座標軸的單位通常為毫米(mm),原點是相機光軸與相面的交點(稱為主點),即影象的中心點,x軸、y軸分別與u軸、v軸平行。故兩個座標系實際是平移關係,即可以通過平移就可得到。
設每個畫素的物理尺寸大小為 dx * dy (mm) ( 由於單個畫素點投影在影象平面上是矩形而不是正方形,因此可能dx != dy。
u = x / dx + u0 , v = y / dy + v0
影象座標系轉換為畫素座標系如下:

1.6 世界座標系轉換為畫素座標系
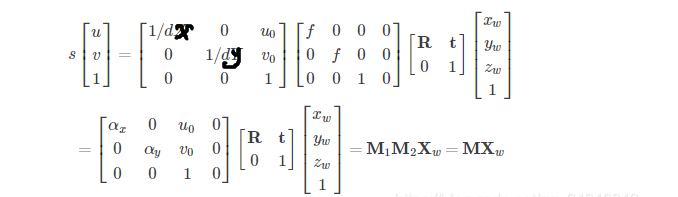
其中,αx=f/dx , αy=f/dy,稱為u、v軸的尺度因子,M1稱為相機的內部引數矩陣,M2稱為相機的外部引數矩陣,M稱為投影矩陣。