
OpenCV-Python之Canny邊緣檢測
阿新 • • 發佈:2018-12-22
Canny演算法步驟
①高斯模糊 - GaussianBlur
②灰度轉換 - cvtColor
③計算梯度 – Sobel/Scharr
④非最大訊號抑制
⑤高低閾值輸出二值影象——高低閾值比值為2:1或3:1最佳
程式碼演示
# Canny運算元
def Canny_demo(image):
blur = cv.GaussianBlur(image, (3, 3), 0)
gray = cv.cvtColor(blur, cv.COLOR_BGR2GRAY)
gradx = cv.Sobel(gray, cv.CV_16SC1, 1, 0)
grady = 結果
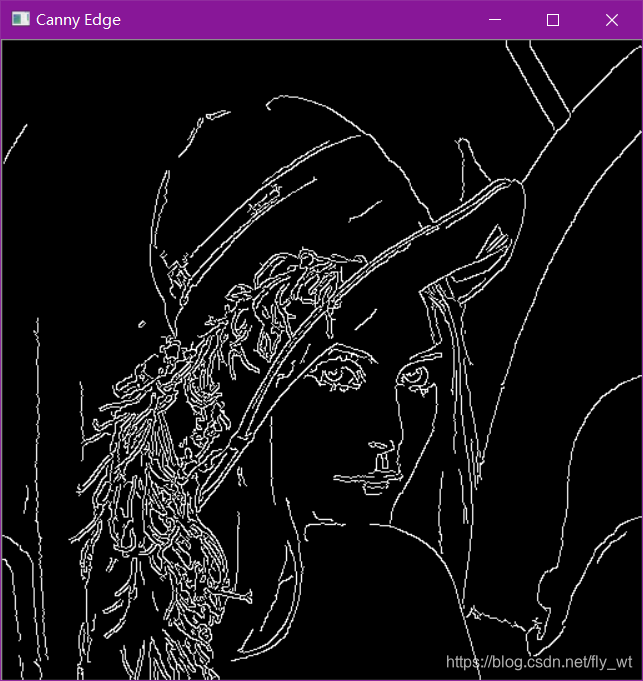
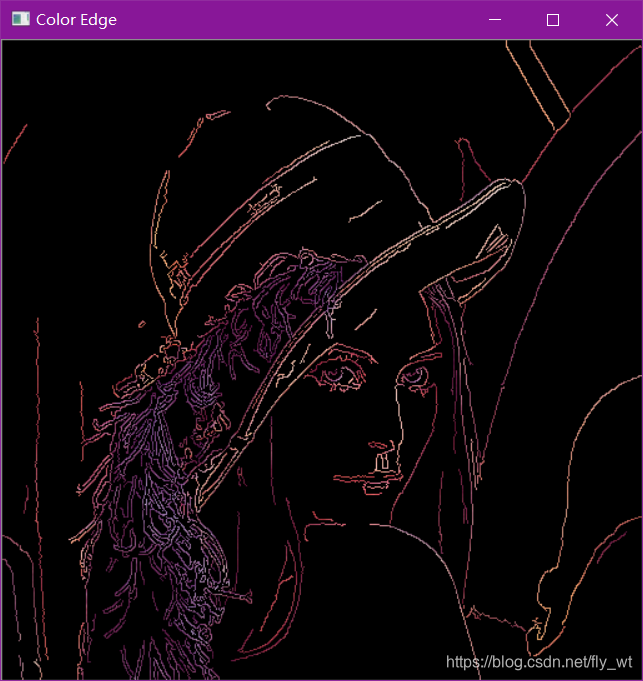
Canny演算法的兩種方式
1.使用帶自定義影象漸變的Canny演算法在影象中查詢邊緣,
其函式原型為:Canny(dx, dy, threshold1, threshold2, edges, L2gradient)
- dx引數表示輸入影象的x導數(x導數滿足16位,選擇CV_16SC1或CV_16SC3)
- dy引數表示輸入影象的y導數(y導數滿足16位,選擇CV_16SC1或CV_16SC3)。
- threshold1引數表示設定的低閾值。
- threshold2引數表示設定的高閾值,一般設定為低閾值的3倍 (根據Canny演算法的推薦)。
- edges引數表示輸出邊緣影象,單通道8點陣圖像。
L2gradient引數表示L2gradient引數表示一個布林值,如果為真,則使用更精確的L2範數進行計算(即兩個方向的倒數的平方和再開方),否則使用L1範數(直接將兩個方向導數的絕對值相加)
直接呼叫Canny演算法在單通道灰度影象中查詢邊緣
其函式原型為:Canny(image, threshold1, threshold2, edges=None, apertureSize=None, L2gradient=None)
- image引數表示8位輸入影象。
- threshold1引數表示設定的低閾值。
- threshold2引數表示設定的高閾值,一般設定為低閾值的3倍 (根據Canny演算法的推薦)。
- edges引數表示輸出邊緣影象,單通道8點陣圖像。
- apertureSize引數表示Sobel運算元的大小
- L2gradient引數表示一個布林值,如果為真,則使用更精確的L2範數進行計算(即兩個方向的倒數的平方和再開方),否則使用L1範數(直接將兩個方向導數的絕對值相加)。