openCV—Python(11)—— 影象邊緣檢測
阿新 • • 發佈:2019-01-07
一、函式簡介
1、laplacian運算元
函式原型:Laplacian(src, ddepth, dst=None, ksize=None, scale=None, delta=None, borderType=None)
src:影象矩陣
ddepth:深度型別
2、Sobel運算元
函式原型:Sobel(src, ddepth, dx, dy, dst=None, ksize=None, scale=None, delta=None, borderType=None)
src:影象矩陣
ddepth:深度型別
dx:x方向
dy:y方向
3、Canny運算元
函式原型:Canny(image, threshold1, threshold2, edges=None, apertureSize=None, L2gradient=None)
image:影象矩陣
threshold1:閾值1
threshold1:閾值2
二、例項演練
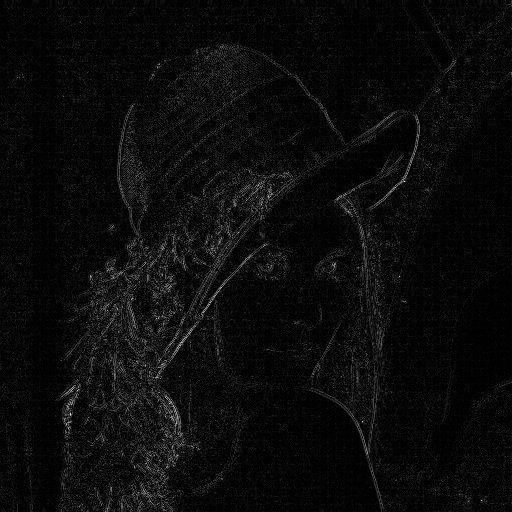
1、拉普拉斯邊緣檢測
程式碼如下:
#encoding:utf-8
#
#laplacian邊緣檢測
#
import numpy as np
import cv2
image = cv2.imread("H:\\img\\lena.jpg")
image = cv2.cvtColor(image,cv2.COLOR 結果如下:
原影象:

laplacian邊緣檢測結果:
2、Soble邊緣檢測
程式碼如下:
#encoding:utf-8
#
#Sobel邊緣檢測
# 結果如下:
原影象:

X方向邊緣檢測結果:

Y方向邊緣檢測結果:

XY方向結合邊緣檢測結果:

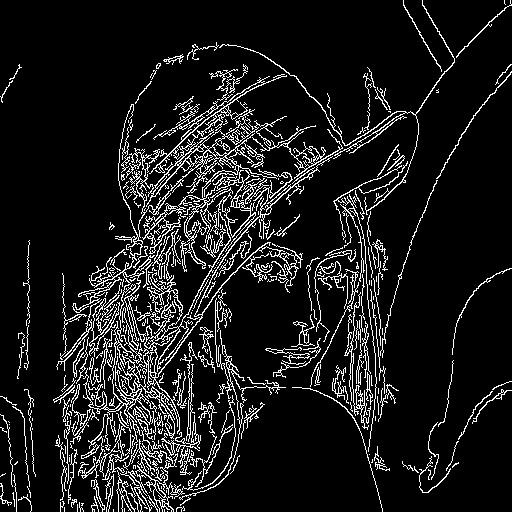
3、Canny邊緣檢測
程式碼如下:
#encoding:utf-8
#
#Canny邊緣檢測
#
import numpy as np
import cv2
image = cv2.imread("H:\\img\\lena.jpg")#讀入影象
image = cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)#將影象轉化為灰度影象
cv2.imshow("Image",image)#顯示影象
cv2.waitKey()
#Canny邊緣檢測
canny = cv2.Canny(image,30,150)
cv2.imshow("Canny",canny)
cv2.waitKey()