二叉平衡樹的旋轉操作
平衡二叉樹簡稱平衡樹,是由Adelson-Velskii和Landis於1962年首先提出的,所以又稱為AVL樹。他的定義很簡單,就是若一棵二叉樹的每個左右節點的高度差最多相差1,此二叉樹即是平衡二叉樹。把二叉樹的每個節點的左子樹減去右子樹定義為該節點的平衡因子。二叉平衡樹的平衡因子只能是1、0或者-1。
平衡二叉樹是對二叉搜尋樹(又稱為二叉排序樹)的一種改進。二叉搜尋樹有一個缺點就是,樹的結構是無法預料的,隨意性很大,它只與節點的值和插入的順序有關係,往往得到的是一個不平衡的二叉樹。在最壞的情況下,可能得到的是一個單支二叉樹,其高度和節點數相同,相當於一個單鏈表,對其正常的時間複雜度有O(lb n)變成了O(n),從而喪失了二叉排序樹的一些應該有的優點。
當插入一個新的節點的時候,在普通的二叉樹中不用考慮樹的平衡因子,只要將大於根節點的值插入到右子樹,小於節點的值插入到左子樹,遞迴即可。而在平衡二叉樹則不一樣,在插入節點的時候,如果插入節點之後有一個節點的平衡因子要大於2或者小於-2的時候,他需要對其進行調整,現在只考慮插入到節點的左子樹部分(右子樹與此相同)。主要分為以下三種情況:
(1)若插入前一部分節點的左子樹高度和右子樹高度相等,即平衡因子為0,插入後平衡因子變為1,仍符合平衡的條件不用調整。
(2)若插入前左子樹高度小於右子樹高度,即平衡因子為-1,則插入後將使平衡因子變為0,平衡性反倒得到調整,所以不必調整。
(3)若插入前左子樹的高度不等於右子樹高度,即平衡因子為1或-1,則插入節點之後會使得平衡因子變為2或者-2,這樣的情況下就破壞了平衡二叉樹的結構,所以必須對其進行調整,使其平衡;
插入節點會破壞平衡的四種情況:
有四種種情況可能導致二叉查詢樹不平衡,分別為:
(1)LL:插入一個新節點到根節點的左子樹(Left)的左子樹(Left),導致根節點的平衡因子由1變為2
(2)RR:插入一個新節點到根節點的右子樹(Right)的右子樹(Right),導致根節點的平衡因子由-1變為-2
(3)LR:插入一個新節點到根節點的左子樹(Left)的右子樹(Right),導致根節點的平衡因子由1變為2
(4)RL:插入一個新節點到根節點的右子樹(Right)的左子樹(Left),導致根節點的平衡因子由-1變為-2
調整二叉樹首先要明白一個定義,即最小不平衡子樹。最小不平衡子樹是指以離插入節點最近、且平衡因子絕對值大於1的節點做根的子樹。
下面講解平衡二叉樹最基本的4種調整操作,調整的原則是調整後他的搜尋二叉樹的性質不變,即樹的中序遍歷是不會改變的。
情況一:LL ->插入F節點導致失衡:
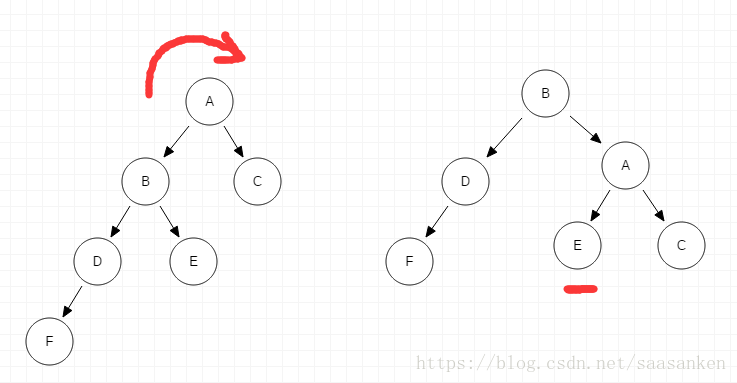
這裡失衡的是A的左右子樹,很容易就可以想到旋轉B-A鏈,值得注意的是E節點,它原先在B的右子樹,現在也依然在B的右子樹,它原先在A的左子樹,現在也依然在A的左子樹。
若插入F節點在D的右子樹處,旋轉操作依然是上圖那樣,不談。
但如果插入F節點是E的孩子就不一樣了。
情況二:LR ->插入F節點導致失衡:
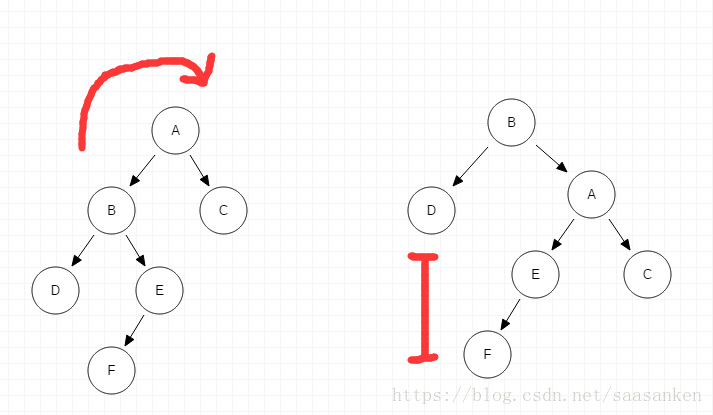
插入節點是E的孩子時,如果我們還像上面那樣旋轉B-A鏈,旋轉後的樹依然是不平衡的。事實上,這樣的旋轉使得B成為了新的根節點,而原圖中比B大的節點有4個,比B小的節點只有D,若B為根其左子樹只能為D,必定是不平衡的。
我們仔細觀察原圖,這裡E節點是很特殊的節點。首先它是實際執行了插入操作的節點,其次圖中比E小的節點有B、D、F,比E大的節點有A、C。如果能夠讓E節點做新的根節點就很好平衡了,那麼怎樣讓E節點“上位”呢?
方法是進行兩次旋轉,如下圖:

E節點恐成最大贏家……
插入節點是E的右子樹的情況與之類似,這裡給出旋轉圖:

F比E大,雙旋之後還是在E的右節點。
雙旋看圖理解起來簡單,實際實現時要注意,我們可以判斷失衡的是A節點,由A有直接關係的是B和C,那麼我們怎麼知道新插入的F節點是D的子樹還是E的子樹呢?這裡的方法是比較F節點值與B的大小,大則是E的子樹,要左-右共兩次旋轉,小則是D的子樹,要一次右旋轉。
當然還要考慮映象情況:
情況三:RR ->插入 F導致失衡:
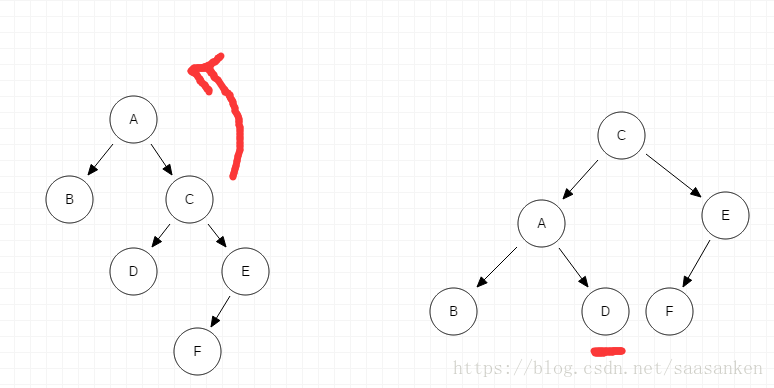
進行一次左旋,關注D節點,它比C小,旋轉後依然在C的左子樹。
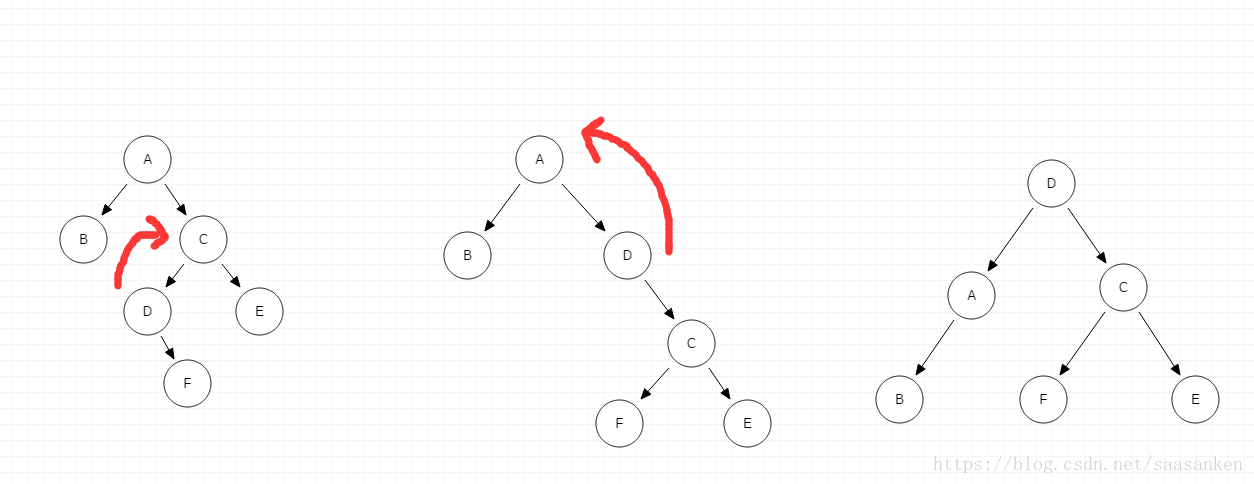
情況四:RL ->插入F導致失衡:
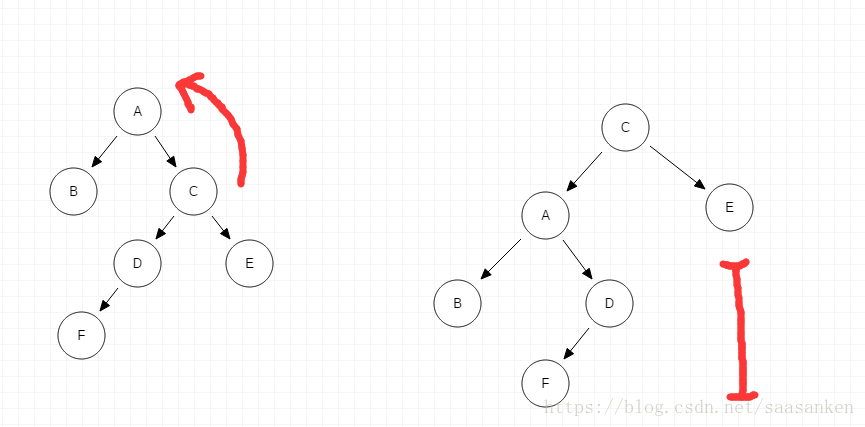
這時候左旋失敗,理由和之前右旋失敗類似,比C節點大的節點只有一個E,C是沒法做新的根節點的。這裡特殊的是D節點。

進行右-左兩次雙旋就可以了。D節點:爽到……
插入節點是D的右子樹情況類似,RT:
參考:https://blog.csdn.net/saasanken/article/details/80796178