
[Sensor]--BMI160-加速度計、陀螺儀感測器
阿新 • • 發佈:2018-12-26
最近在搞一個和加速度計相關的專案,所以接觸到的感測器比較多,現在寫一個總結吧,防止後來者和我一樣走這麼多的彎路。
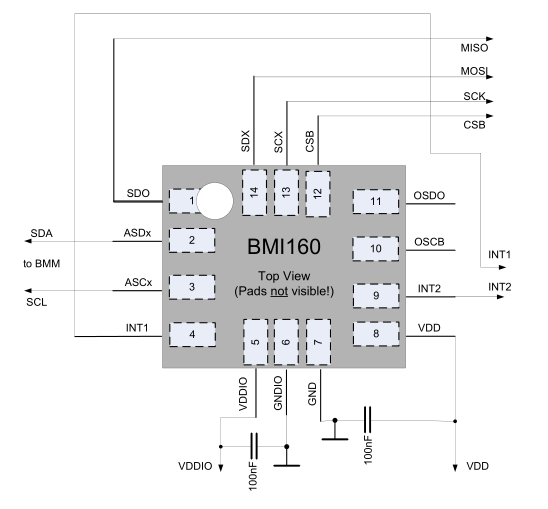
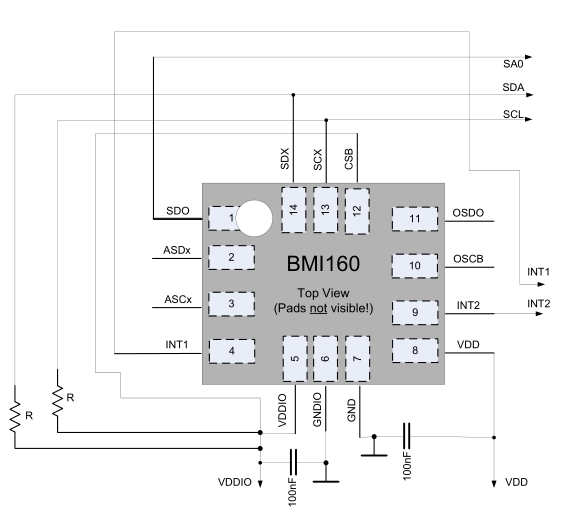
首先看到的是引腳圖,如果驅動不了應該首先排除硬體的問題:
SPI接法
IIC接法
接著我們就著重看下面的幾個暫存器:
| 感測器名(讀/寫) | 暫存器號 | 功能 |
|---|---|---|
| CHIPID(R) | 0x00 | 晶片的ID,一般用來看驅動是否正常,固定值0xD1 |
| PMU_STATUS(R) | 0x03 | 顯示當前各感測器的電源模式,分normal\low_power\suspend三種模式 |
| ACC_CONF(RW) | 0x40 | 設定輸出資料速率、 頻寬和加速度感測器讀取的模式 |
| ACC_RANGE | 0x41 | 允許選擇的加速度 g 範圍 |
| GYR_CONF(RW) | 0x42 | 在感測器中設定輸出資料速率、 頻寬和陀螺儀讀取的模式。 |
| GYR_RANGE(RW) | 0x43 | 定義 BMI160 角速度測量範圍 |
| INT_EN(RW) | 0x50-0x52 | 啟用各種中斷,包括加速度資料、角速度資料和各種特殊功能的中斷,使能後對映到INT1上輸出,就可以觸發微控制器的外部中斷了。 |
| INT_OUT_CTRL(RW) | 0x53 | 輸出控制,包括輸出使能,觸發電平、邊沿和輸出模式(推輓和開漏) |
| INT_LATCH(RW) | 0x54 | 設定中斷鎖存模式(不是很懂,一開始就是鎖存了所以一直沒有中斷輸出…,後來關掉就好了) |
| CMD(R) | 0x7E | 命令暫存器觸發操作,如 softreset、 NVM 程式設計等。特殊的如:start_foc、acc_set_pmu_mode、gyr_set_pmu_mode、mag_set_pmu_mode、prog_nvm、fifo_flush、int_reset、softreset、step_cnt_clr |
接下來就是各種特殊功能暫存器了,就不多說了,用哪個配置那個就可以了
重點說下這個計步的功能吧,現在還比較火:
| 感測器名(讀/寫) | 暫存器號 | 功能 |
|---|---|---|
| STEP_CONF(RW) | 0x7A-0x7B | 步數檢測的配置,包括Normal mode,Sensitive mode,Robust mode三種也可以自己配置 |
| STEP_CNT(R) | 0x78-0x79 | 直接從這兩個暫存器中讀出記得步數,要注意的是範圍是-32768——32768 |
下面的程式碼片是計步的初始化,用的是STM32F405:
void bmi160_init(void)
{
uint8_t ui8Status = 0;
uint8_t ui8Attempts = 20;
uint8_t Device_ID;
BMI160_SPI_Init();
kprintf("BMI160 Init Ok.\n");
BMI160_CS=1; //SPI片選取消
// Reset the BMI160 sensor
bmi160_reset();
// Put accel and gyro in normal mode.
while (ui8Status != 0x20 && ui8Attempts--)
{
BMI160_Write_Reg(AM_DEVICES_BMI160_CMD, 0x12);//設定加速度計為 low_power
BMI160_Write_Reg(AM_DEVICES_BMI160_CMD, 0x14);//設定陀螺儀 suspend
delay_ms(1);
ui8Status = BMI160_Read_Reg(AM_DEVICES_BMI160_PMU_STATUS);//讀加速度和陀螺儀是否初始化為low_power suspend
}
// BMI160 not in correct power mode
if (!ui8Attempts)
{
return;
}
kprintf("PMU_STATUS:0x%X \r\n",ui8Status);
BMI160_Write_Reg( AM_DEVICES_BMI160_STEP_CONF_0, 0x15);//計步功能
BMI160_Write_Reg( AM_DEVICES_BMI160_STEP_CONF_1, 0x0B);
BMI160_Write_Reg( AM_DEVICES_BMI160_ACC_RANGE, 0x05);//設定加速度計+-4g
// Read status register to clear it.
ui8Status = BMI160_Read_Reg(AM_DEVICES_BMI160_ERR_REG);//讀錯誤狀態暫存器清ui8Status
// Enable INT 1 output as active high
BMI160_Write_Reg(AM_DEVICES_BMI160_INT_OUT_CTRL, 0x0A);//輸出使能INT1引腳,高電平活躍
//INT1 Set
// Map INT1 to the Step detection interrupt
BMI160_Write_Reg(AM_DEVICES_BMI160_INT_MAP_1, 0x80);//對映INT1到 watermark中斷
// Enable INT 1 as FIFO watermark
BMI160_Write_Reg(AM_DEVICES_BMI160_INT_EN_1, 0x10);//使能data-ready
}
//得到步數
void bmi160_getStep(short *rawStep)
{
uint8_t buf[2];
buf[0]= BMI160_Read_Reg(AM_DEVICES_BMI160_STEP_CNT_1);
buf[1]= BMI160_Read_Reg(AM_DEVICES_BMI160_STEP_CNT_0);
*rawStep=((uint16_t)buf[0]<<8)|buf[1];
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
SPI的初始化(我一開始用的是EEPROM的SPI配置讀寫等,一直驅動不了,後來才突然發現是SPI的問題):
///////////////////以下為BMI160驅動////////////////////
void BMI160_SPI_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能GPIOA時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);//使能SPI1時鐘
//GPIOF9,F10初始化設定
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7;//PB3~5複用功能輸出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//複用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推輓輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化
GPIO_PinAFConfig(GPIOA,GPIO_PinSource5,GPIO_AF_SPI1); //PI1複用為 SPI1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource6,GPIO_AF_SPI1); //PI2複用為 SPI1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource7,GPIO_AF_SPI1); //PI3複用為 SPI1
//這裡只針對SPI口初始化
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,ENABLE);//復位SPI1
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,DISABLE);//停止復位SPI1
SPI_I2S_DeInit(SPI1);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //設定SPI單向或者雙向的資料模式:SPI設定為雙線雙向全雙工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //設定SPI工作模式:設定為主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //設定SPI的資料大小:SPI傳送接收8位幀結構
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步時鐘的空閒狀態為高電平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行同步時鐘的第二個跳變沿(上升或下降)資料被取樣
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS訊號由硬體(NSS管腳)還是軟體(使用SSI位)管理:內部NSS訊號有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_64; //定義波特率預分頻的值:波特率預分頻值為256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定資料傳輸從MSB位還是LSB位開始:資料傳輸從MSB位開始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值計算的多項式
SPI_Init(SPI1, &SPI_InitStructure); //根據SPI_InitStruct中指定的引數初始化外設SPIx暫存器
SPI_Cmd(SPI1, ENABLE); //使能SPI外設
SPI1_ReadWriteByte(0xff);//啟動傳輸
}
//SPI1速度設定函式
//SPI速度=fAPB2/分頻係數
//@ref SPI_BaudRate_Prescaler:SPI_BaudRatePrescaler_2~SPI_BaudRatePrescaler_256
//fAPB2時鐘一般為84Mhz:
void SPI1_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));//判斷有效性
SPI1->CR1&=0XFFC7;//位3-5清零,用來設定波特率
SPI1->CR1|=SPI_BaudRatePrescaler; //設定SPI1速度
SPI_Cmd(SPI1,ENABLE); //使能SPI1
}
//SPI1 讀寫一個位元組
//TxData:要寫入的位元組
//返回值:讀取到的位元組
u8 SPI1_ReadWriteByte(u8 TxData)
{
u8 result,Retry=0;//result:返回spi讀寫的結果; retry:失敗重試次數
while (SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE)==RESET)
{
Retry++;
if(Retry>200) return 0;
}
SPI_I2S_SendData(SPI1, TxData);
while (SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_RXNE)==RESET)
{
Retry++;
if(Retry>200) return 0;
}
return SPI_I2S_ReceiveData(SPI1);
SPI_I2S_ClearFlag(SPI1,SPI_I2S_FLAG_RXNE);
}
//讀取SPI暫存器值
//reg:要讀的暫存器
u8 BMI160_Read_Reg(u8 reg)
{
u8 reg_val;
BMI160_CS = 0; //使能SPI傳輸
delay_ms(1);
SPI1_ReadWriteByte(reg|0x80); //1.傳送暫存器號 //Ored with "read request" bit
reg_val=SPI1_ReadWriteByte(0XFF);//讀取暫存器內容 // send a value of 0 to read the first byte returned:
delay_ms(1);
BMI160_CS = 1; //禁止SPI傳輸
return(reg_val); //返回狀態值
}
//SPI寫暫存器
//reg:指定暫存器地址
//value:寫入的值
u8 BMI160_Write_Reg(u8 reg,u8 value)
{
u8 status;
BMI160_CS=0; //使能SPI傳輸
status =SPI1_ReadWriteByte(reg&0x7f);//2.傳送暫存器號
SPI1_ReadWriteByte(value); //寫入暫存器的值
BMI160_CS=1; //禁止SPI傳輸
return(status); //返回狀態值
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103