
MATLAB 牛頓迭代法解非線性方程組
阿新 • • 發佈:2018-12-26
牛頓迭代法流程圖:
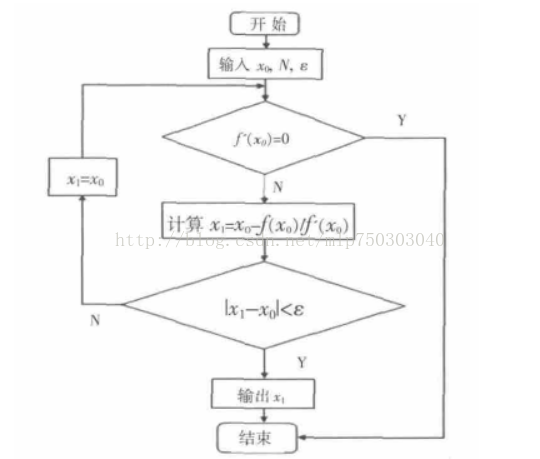
Newton迭代法計算步驟 :
(1) 取初始點x0,最大迭代次數N和精 度 ε。
(2) 如果 f' (x0)=0, 則停止計算;否則計算 x1 = x0 -f(x0)/ f'(x0)。
(3) 如果|x1-x0|<ε, 則停止計算 ; 否 則 x0=x1, 轉 到 (2)。
(4) 如果n=N, 則停止計算; 否 則 取 n=n+1, 轉 到 (2)。
function f=fun(x); %定義非線性方程組 syms x1 x2 x3 x5 x6 x7 x8 x9 x10 x11 x12 x13 x14 x15 p=1025; g=9.8; f1=-p*g*x1*pi+12000+sin(x2)*x3; f2=-x3*cos(x2)+0.625*pi*(2-x1)*12*12; f3=-x3*sin(x2)-pi*0.025*0.025*p*g+100+x(5)*sin(x6); f4=-x3*cos(x2)+x5*cos(x6); f5=-x5*sin(x6)-pi*0.025*0.025*p*g+100+x7*sin(x8); f6=-x5*cos(x6)+x7*cos(x8); f7=-x7*sin(x8)-pi*0.025*0.025*p*g+100+x9*sin(x10); f8=-x7*cos(x8)+x9*cos(x10); f9=-x9*sin(x10)-pi*0.025*0.025*p*g+100+x11*sin(x12); f10=-x9*cos(x10)+x(11)*cos(x12); a=0.625*12*12*pi*(2-x1); f11=-0.15*0.15*p*g-x11*sin(x12)+1000+0.625*12*12*pi*(2-x1)*cosh(x13/a)*sin(x14)+12000; f12=-x11*cos(x12)+0.625*12*12*pi*(2-x1)*cosh(x13/a)*cos(x14); f14=-x1-(sin(x2)+sin(x6)+sin(x8)+sin(x10)+sin(x12))-x15+18; f15=-x15+a-cosh(x13/a-1); f16=-p*(pi*x(1)+0.025*0.025*pi*4+0.15*0.15*pi)+1000+40+100+1200; f17=-cos(x14)+1/cosh(x13/a); f=[f1 f2 f3 f4 f5 f6 f7 f8 f9 f10 f11 f12 f14 f15 f16 f17];
function df=dfun1(x) %雅克比矩陣
f=fun(x);
df=[diff(f,'x1');diff(f,'x2');diff(f,'x3');diff(f,'x5');diff(f,'x6');diff(f,'x7');diff(f,'x8');diff(f,'x9');diff(f,'x10');diff(f,'x11');diff(f,'x12');diff(f,'x13');diff(f,'x14');diff(f,'x15')]; clear;clc format; x0=[0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1,0.1]; % 迭代初始值 eps = 0.0001; % 定位精度要求 for i = 1:1000 f = double(subs(fun(x0),{'x1' 'x2' 'x3' 'x5' 'x6' 'x7' 'x8' 'x9' 'x10' 'x11' 'x12' 'x13' 'x14' 'x15'},{x0(1) x0(2) x0(3) x0(4) x0(5) x0(6) x0(7) x0(8) x0(9) x0(10) x0(11) x0(12) x0(13) x0(14) })); df = double(subs(dfun1(x0),{'x1' 'x2' 'x3' 'x5' 'x6' 'x7' 'x8' 'x9' 'x10' 'x11' 'x12' 'x13' 'x14' 'x15'},{x0(1) x0(2) x0(3) x0(4) x0(5) x0(6) x0(7) x0(8) x0(9) x0(10) x0(11) x0(12) x0(13) x0(14)})); % 得到雅克比矩陣 x = x0 - f/df; if(abs(x-x0) < eps) break; end x0 = x; % 更新迭代結果 end disp('定位座標:'); x disp('迭代次數:'); i