
先進駕駛員輔助系統ADSA
ADSA(Advanced Driver-Assistance Systems)字面翻譯過來是“先進駕駛員輔助系統”,實際上它是一種“輔助駕駛員更便捷更安全使用汽車”的系統。
ADAS的研發歷史可以追溯到上個世紀50年代,工程師開始嘗試將雷達佈置在汽車上,用以實現周圍環境的檢測功能。據維基百科中對ADAS系統的描述,第一臺具有ADAS功能的量產車是在1997年由豐田推出的Celsior,該車具備自適應巡航功能。
隨後越來越多的感測器被安裝在車上,ADAS功能也越來越豐富。
能被稱作ADAS的功能有很多,無論是常見的自適應巡航,還是更高階的車道保持輔助,甚至L2級別的自動駕駛功能,都是依賴以下三種感測器實現的,它們分別是毫米波雷達、視覺感測器和超聲波雷達,如下圖。

毫米波雷達
說到雷達,首先浮現在腦海中的,肯定是下面這兩個場景。場景中的雷達是通過發射電磁波進行物體監測的。

電磁波雷達被髮明後,成本極高,僅用於軍事、航空等高階領域,同時應用場景也決定了它的尺寸巨大。隨著技術越來越成熟及電磁波雷達商業化的潛力,車載的電磁波雷達也越來越常見,甚至很多平價車型也標配了電磁波雷達。
應用於汽車的電磁波雷達一般是指毫米波雷達。顧名思義,毫米波雷達發出電磁波的波長在毫米量級。最常見的毫米波雷達是頻率介於77Ghz~79Ghz的長距離毫米波雷達。
長距離毫米波雷達一般安裝在汽車的前、後保險槓中,能夠幫助車輛實現自適應巡航、前方碰撞預警和自動緊急剎車功能。
長距離毫米波雷達
長距離毫米波雷達一般安裝在汽車的前、後保險槓中。如下圖所示,被標註為綠色框的Long-range radar。長距離毫米波雷達能夠實現的ADAS功能很多,最常見的有自適應巡航、自動緊急剎車。

自適應巡航
自適應巡航(Adaptive Cruise Control,簡稱ACC)技術出現在量產車上可以追溯到1999年,賓士、捷豹、日產在其豪華車型上配備了ACC功能。
ACC的原理並不複雜。首先設定一個跟車距離,隨後通過長距離毫米波雷達實時監測前方的汽車,通過對發動機和制動器的控制,使前車與自車始終保持在設定的距離。這樣駕駛員就可以解放雙腳,控好方向盤即可。
自適應巡航,瞭解一下?
自適應巡航功能
前方碰撞預警
前方碰撞預警(Front Collision Warning,簡稱FCW)是在自車行駛過程中對有可能出現的碰撞風險進行預警,以提醒駕駛員減速。當然FCW還有一個升級版,叫自動緊急剎車(Autonomous Emergency Braking,簡稱AEB),AEB除了能實現FCW的預警功能外,還能在預警後對車輛的制動系統進行控制,緊急介入減速車輛,降低碰撞風險。
理論上毫米波雷達和攝像機均能實現FCW功能,不過業界更多地使用毫米波雷達。因為自動緊急剎車功能,需要前方障礙物的準確距離,這樣才能根據汽車動力學模型準確計算出碰撞時間,進而判斷是否需要預警,而攝像頭在距離測量的精度方面是遠遠不如毫米波雷達的。
前方碰撞預警,瞭解一下?
前方碰撞預警
中距離毫米波雷達
中距離毫米波雷達一般安裝在汽車的四個角上。如下圖所示,被標註為橙色框的Corner radar和Rear radar。中距離毫米波雷達能夠實現最常見的ADAS功能的盲點監測。
盲點監測系統
盲點監測系統(Blind Spot Monitor)是用於監測自車後側方盲區內其他汽車的系統,用以提醒駕駛員後側方存在碰撞風險,請勿變道。該功能的實現依賴於後側向毫米波雷達對障礙物的檢測能力,並以此為根據對駕駛員進行預警。
盲點監測系統,瞭解一下?
盲點監測系統
當然,側向毫米波雷達除了能在開車時進行盲區的監測外,還能夠在停車時,監測後方來車,實現開門報警的功能,如下圖所示。

攝像機
得益於5年前AI技術的大爆發,使得使用影象做識別的門檻突然降低,攝像機也成了ADAS領域的標配,基於攝像機的駕駛員監測、車道偏離預警、交通標誌識別等功能被廣泛應用在量產車型中。
駕駛員監測
駕駛員監測(Driver Monitoring System,簡稱DMS)最早出現在量產車上是在2006年的雷克薩斯GS 450h上,隨著技術慢慢成熟越來越多的豪華車上配備了該系統。
目前最成熟的當屬凱迪拉克CT6上的DMS了,它通過監測駕駛員的面部,獲取駕駛員的注意力資訊,配合高速公路自動駕駛系統使用,當駕駛員注意力不在道路上時,則預警。如下圖所示,攝像頭的安裝位置在儀表盤前方。

駕駛員監測,瞭解一下?
駕駛員監測
車道偏離預警
車道偏離預警(Lane Departure Warning,簡稱LDW)是業界耳熟能詳的功能。因為實現車道線和汽車的相對關係是安全輔助駕駛最基本的需求之一。
LDW僅提供預警功能,汽車回到車道內行駛需要駕駛員手動控制方向盤。在預警的基礎上,LDW可以升級到更高階的車道保持輔助系統(Lane Keep Assist,簡稱LKA),在駕駛員未對警告資訊做處理的情況下,汽車自動回正方向盤,保持車輛在本車道內行駛。如果真要換道怎麼辦?那就請先開啟轉向燈。
車道偏離預警系統和車道保持輔助系統,瞭解一下?
車道偏離預警系統和車道保持輔助
超聲波雷達
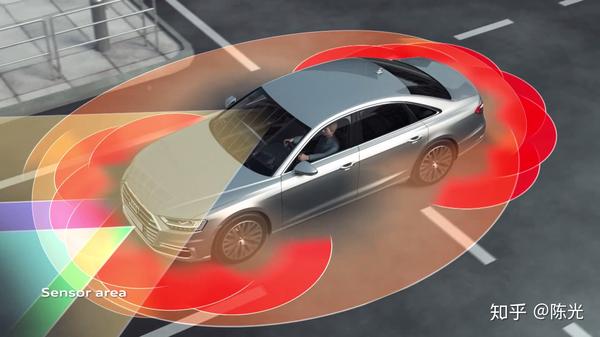
超聲波雷達基本以作為標配存在於量產車上,駕駛員一般成之為倒車雷達。車載的超聲波雷達一般安裝在汽車的保險槓上方,隱藏在保險槓的某個位置。在車上外觀如下圖黃色箭頭處的圓點所示。

下圖中深紅色區域所示,即為超聲波雷達能夠探測的範圍。超聲波雷達一般用於低速的ADAS場景,比如遠端喚車和自動泊車。
遠端召喚
遠端召喚(Remote Summon)是近幾年被特斯拉帶火的一個功能。當汽車停在一個比較狹窄的空間時,不便進入車內時,使用該功能能較方便地將汽車移出車位。汽車收到召喚指令後,會通過車身周圍的超聲波雷達,感知周圍的障礙物位置,進而選擇一條最優的出庫路徑。
特斯拉能夠使用車鑰匙對汽車傳送喚車指令,汽車收到指令後會根據周圍環境進行先前或向後的移動。隨著汽車越來越智慧化,現在也有部分汽車能夠用手機直接進行遠端召喚。
遠端召喚,瞭解一下?
遠端召喚
自動泊車
自動泊車(Automatic Parking Asistance,簡稱APA)是很多新手司機最愛的ADAS功能之一。汽車緩緩駛過庫位時,汽車側方的超聲波雷達可以探測到側方是否存在一個空閒的空間,使得汽車能夠泊入其中。如下圖所示:

汽車緩緩駛過庫位時,汽車右前方的APA感測器返回的探測距離與時間的關係大致如下圖:
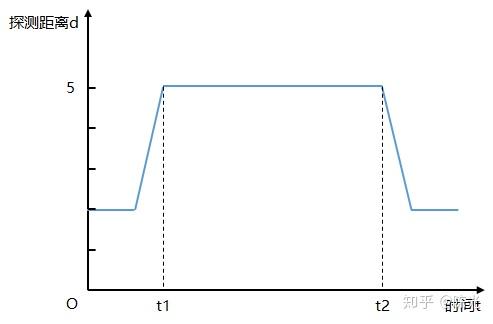
將t1時刻到t2時刻的車速做積分即可得到庫位的近似長度,如果近似認為汽車為勻速行駛,直接用車速乘以(t2-t1)即可。當檢測的長度超過車輛泊入所需的最短長度時則認為當前空間有車位。
同樣後側向的APA也會生成類似訊號曲線,用以做庫位的二次驗證。
有了庫位檢測功能,進而開發自主泊車功能就不是難事了。
自動泊車,瞭解一下?
自動泊車
小結
以上就是目前主流汽車ADAS功能的技術盤點。發揮你的想象力,你會發現,車載的毫米波雷達、超聲波雷達和視覺感測器除了在ADAS領域各司其職,還構成自動駕駛功能的三頭六臂,配合越來越多汽車所具備的OTA功能,汽車將會像手機一樣,擁有一個越來越聰明的大腦。
OTA和豐富的車載感測器為汽車自動駕駛提供了可發揮的空間,也許在不久的將來,你的汽車將能擁有Level 2的自動駕駛能力,我們拭目以待~
作者:陳光
連結:https://zhuanlan.zhihu.com/p/49170116
來源:知乎
著作權歸作者所有。商業轉載請聯絡作者獲得授權,非商業轉載請註明出處。