
Robotics Inference using Nvidia DIGITS
Robotics Inference using Nvidia DIGITS
In this project, a network will be trained for classifying real-world objects into predefined classes. In addition to training a network on the supplied dataset, a different network will be chosen and trained using self-acquired data. The quality and quantity of data acquired will be discussed.
The network would be able to successfully classify the objects in the self-collected data into 4 classes with reasonable accuracy.
Introduction
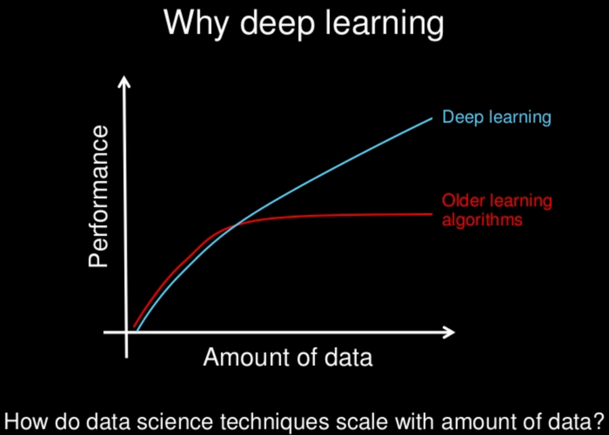
The classification of objects in the 2D image had been tried to be solved by a lot of classical methods but deep learning was able to become the new State of the Art technology. Deep learning shines when there is a lot of data.
The advantages of deep learning :
- Scales well with an increase in data.
- No in-depth feature detection rules of the data need to be hardcoded.
- Adaptable and transferable to the new problem datasets.
In the defense of the classical algorithms[1], classical algorithms are better than deep learning in some cases:
- Needs no training time.
- Financially and computationally cheap to run.
- Easier to implement: The parameter tuning in the case of the classical algorithms is more straightforward because of the thorough understanding of the inner working of them. In case of the deep learning, even the researchers do not understand the inner working of the DL network(almost a black box).

To investigate the effectiveness of the inference models with random everyday objects that are used extensively by the humans, it was decided to classify the everyday objects on the work desk for this inference task.
Classes — Wallet, Mouse, NailCutter, Nothing
All the inference tasks essentially have similar steps that need to be followed. Nvidia DIGITS is a system to smoothen this workflow. This project will employ the Nvidia DIGITS workflow for developing the inference system.
Nvidia DIGITS is a way to quickly:
- Build a dataset that the network can take as input.
- Define, customize and visualize a network architecture.
- Train the network with the dataset.
Nvidia DIGITS provides a cleaner interface to do all of the above, through the web browser.
The common inference tasks are:
- Classification: Answers the what in the image
- Detection: Answers the where in the image
- Segmentation: Pixel-level labeling of the images.
Formulation
Transfer Learning
In practice, it is very rare that a CovNet is trained from scratch (with random initialization) because of the unavailability of the vast amount of dataset and computing power needed.
Andrew Ng once explained neural network as it being like a rocket ship. Rocket ship needs a powerful engine and lot of fuel. Powerful engine but less fuel fails to make it to the orbit. Weak engine but lot of fuel fails to even liftoff. Analogously, DL models are engines and dataset is the fuel.
Transfer learning is the finetuning of a network pretrained on a large dataset of the problem similar to the original problem.
In the project, transfer learning was leveraged. A GoogLeNet that was pretrained on the ImageNet(1000 Image classes) was used for classifying the everyday objects in the self-acquired data.
The GoogLeNet was used because it has 22 layers and 12 times less parameters than the AlexNet because of:
- The absence of the fully connected later at the end.
- Use of the concept of a local mini network inside a bigger network called the Inference module. The inference module played the major role in the parameter reduction. This solved the problem of deciding which convolution to use — 1x1, 3x3, 5x5, 7x7. It enabled the network to use all of the convolutions concatenated depth wise.
The naive Inference module used the depthwise concatenation of the 1x1, 3x3, 5x5 convolutional layers along with a 3x3 max pooling. The max pooling layer led to the depth staying the same or increasing in the output layer of the Inference module. This problem was solved by 1x1 convolutional layer with the 3x3, 5x5 and more importantly the max pooling layer. The number of 1x1 convolutional layer helped reduce the dimensionality of the output layer because the depth of output layer will just be the number of 1x1 convolutional layers.

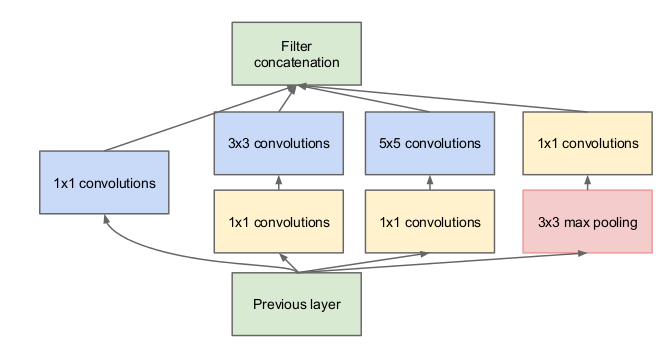
Image Source: Inception module from “Going Deeper with Convolutions.”
GoogLeNet was faster and more accurate than the AlexNet. The idea around the development of GoogLeNet was that it should be able to run even in the smartphone.(calculation budget around 1.5 billion multiply-adds on prediction)
Also, SGD performed better than the RMSProp and was used in the finetuning of the network.
Data Acquisition
Number of images
Number of Training Images
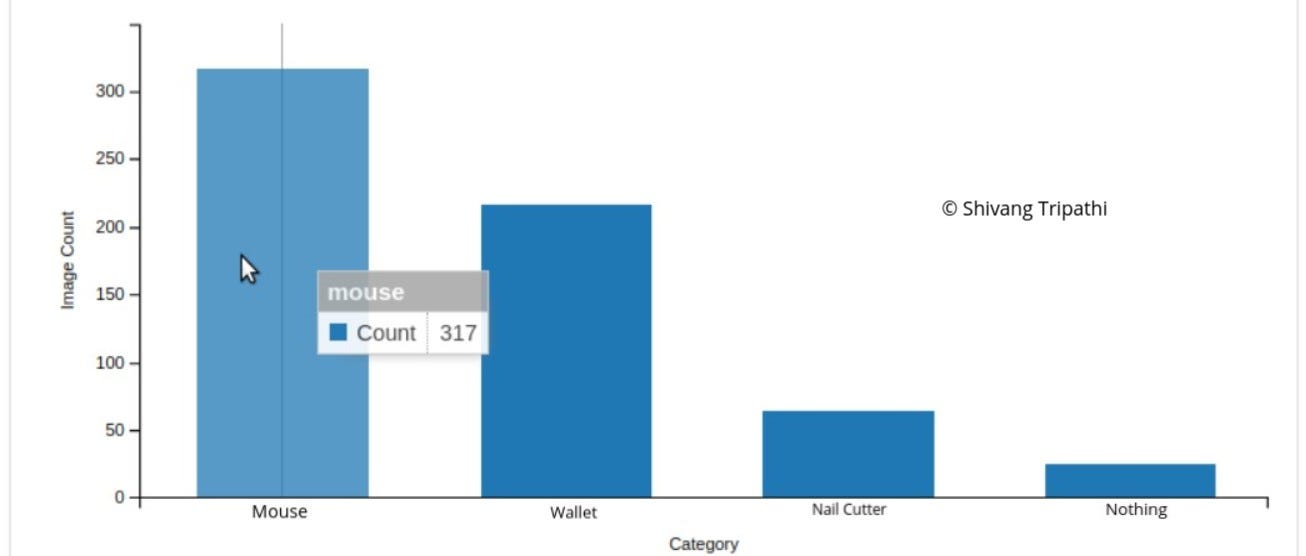
MouseWalletNail CutterNothing3172166425
Training Images Distribution: This distribution of images for each class was used for training the network.

Number of Training Image in Each Class
Number of Test Images
MouseWalletNail CutterNothing10572218
Test Images Distribution: This distribution of images was used for the validation of the network. The network validates its accuracy after each run from these images.


Number of Training Image in Each Class
The collected image data was augmented by using the rotation of:
- 90 degrees clockwise
- 90 degrees counterclockwise
- 180 degrees
As a result, the number of images in the dataset quadrupled.
As it can be seen here, the number of images for the Wallet and Mouse class is much more than the Nail Cutter. This will be explained in detail under the Discussion section.
Size of images
The images were captured after setting the image aspect ratio to 1:1 so that the images are square in shape. This is because the network that we will be training on accepts 256x256 images. If the images are square, they can be easily resized to 256 pixels maintaining the aspect ratio. Had the aspect ratio been different from 1:1, it would lead to the unnecessary cropping or squashing of the image data causing loss of important data.
Also, each such square image had the file size of 7 - 13 kB.
Image Color Type
Real World objects are in color and the grayscale conversions of them will conflict with each other leading to 2 objects looking the same. Thus, the RGB images of the objects were captured and a network that can handle the RGB(GoogLeNet) was used to successfully classify them.
Image Collection Method
The smartphone camera was used for the collection of the images because:
- The same camera would be used for the test of the classification accuracy.
- Lending to the ubiquitous nature of the smartphone cameras, the trained network will have the better probability of successfully classifying the objects in a different condition. This is because at least the testing and training data capture device stayed the same, i.e, smartphone camera.
It should be duly noted that the environmental conditions in which the classification will need to successfully work should overlap with the environment in which the training image would be captured.
For example, if the classification needs to work in a lighted room with diffused sunlight from the window then the data acquisition should be done in the same environment.
MouseWalletNail CutterNothing







As evident, the images:
- Have an aspect ratio of 1:1
- Diffused light that leads to shiny surface
The test conditions will be similar to the above features.
In the supplied data, the images were also square.
Supplied Data


Results
Model for classifying supplied dataset
Used GoogLeNet with SGD with the supplied data that achieved :
- The accuracy of 75.4098%
- Inference time of 5.11062 ms using TensorRT


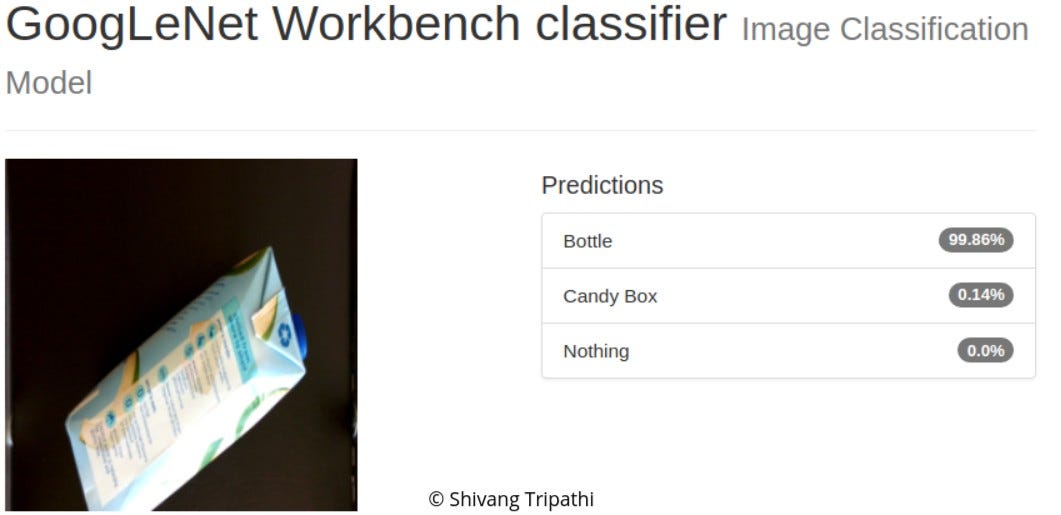
The accuracy and inference time of the network trained on the supplied data
The Caffe model trained on the supplied data can be found here.
The five millisecond inference time is good enough to be deployed for real-time classification for use in the robotics workbench.
Candy BoxBottle



It should be noted that when training the GoogLeNet with the ADAM, the accuracy dropped to 67.213%.

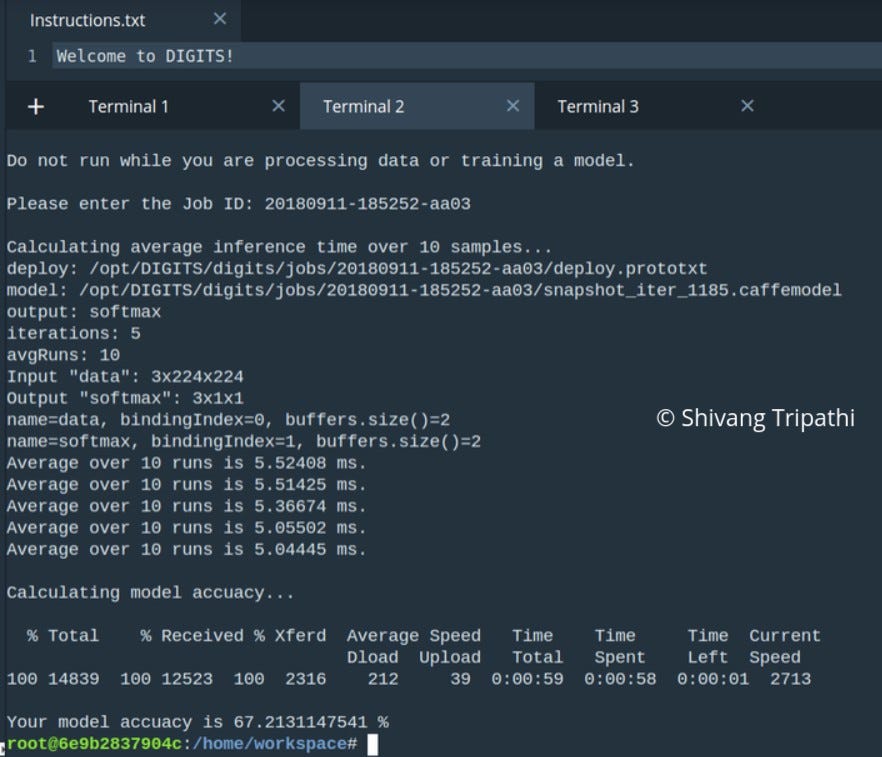
The accuracy of the network decreased when trained with ADAM instead of SGD
Model for classifying self-acquired dataset
In the custom model, the following important features can be seen as a function of epochs:
- Validation Loss
- Validation Accuracy
- Training Loss
- Training Accuracy

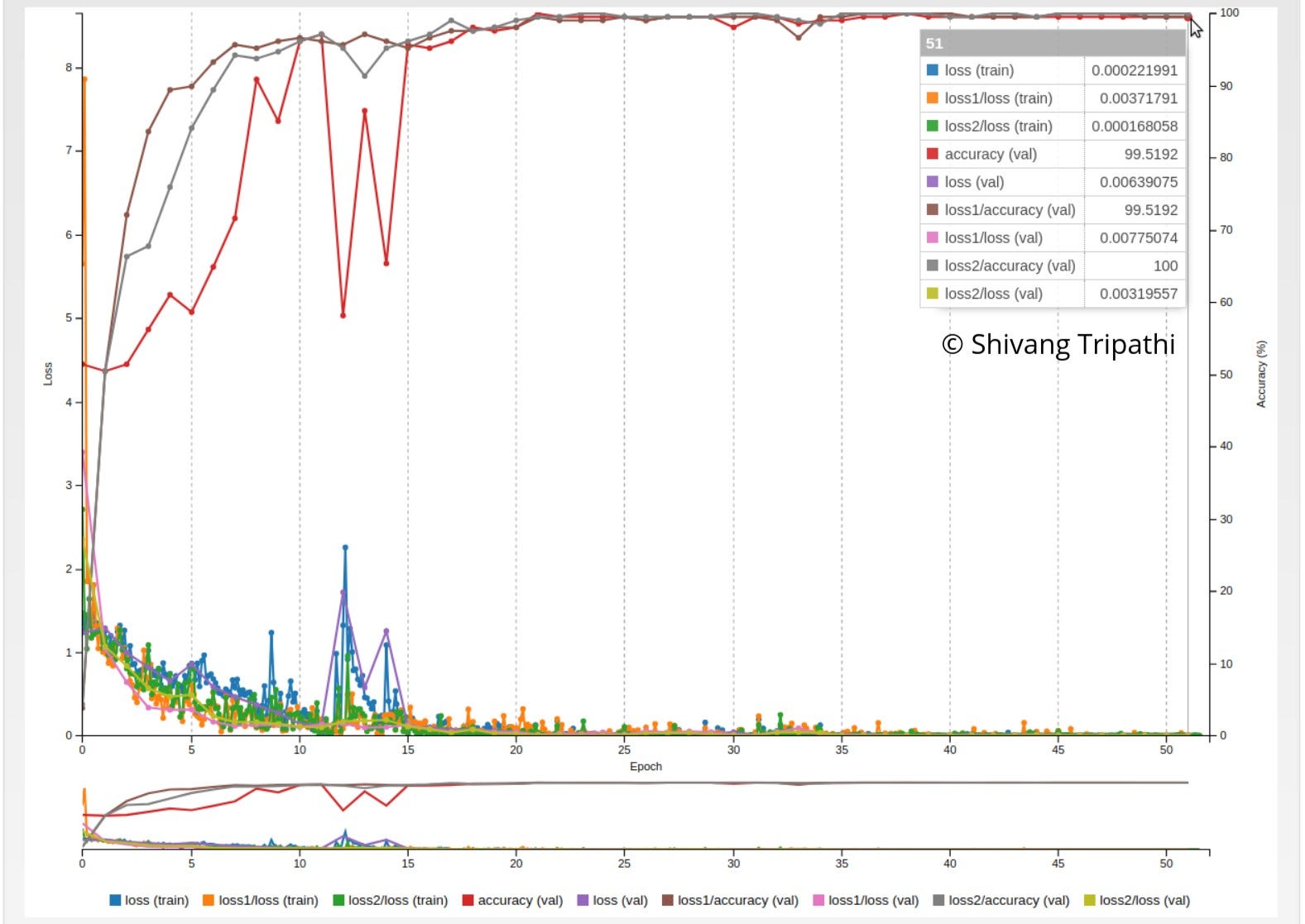
Loss and Accuracy of Train and Validation data with SGD
The custom model was also tested on separate images the result which the network was able to successfully classify with good accuracy.
Separately Tested on Different Images

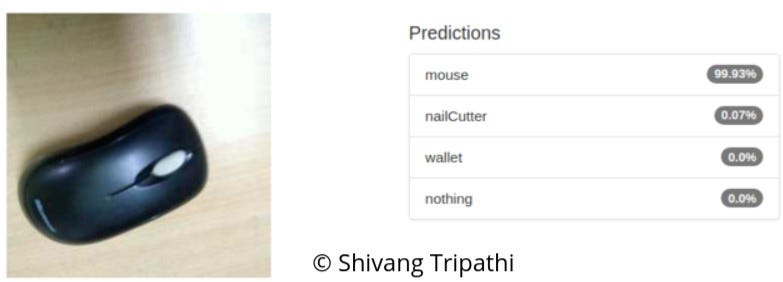



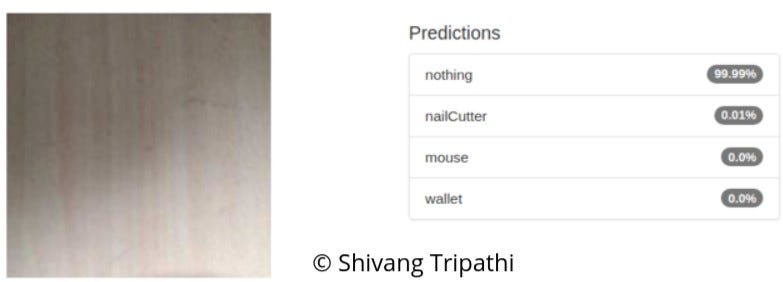

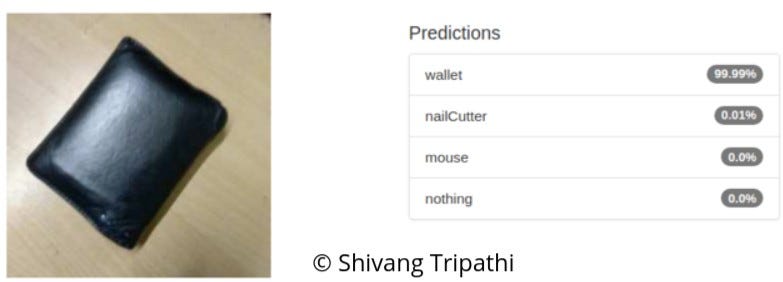
As evident from the separate tested images, the finetuned GoogLeNet was able to successfully classify the objects in the problem set with good accuracy.
Visualizations
As an advantage of using Nvidia DIGITS, the network can be easily visualized. The weights and activations from the pooling layers, convolutional layers, Inception layer can be easily visualized.



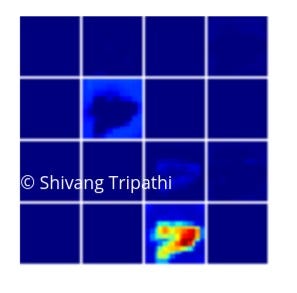
Input image of nail cutterInception layer(near final layers) Output Activations

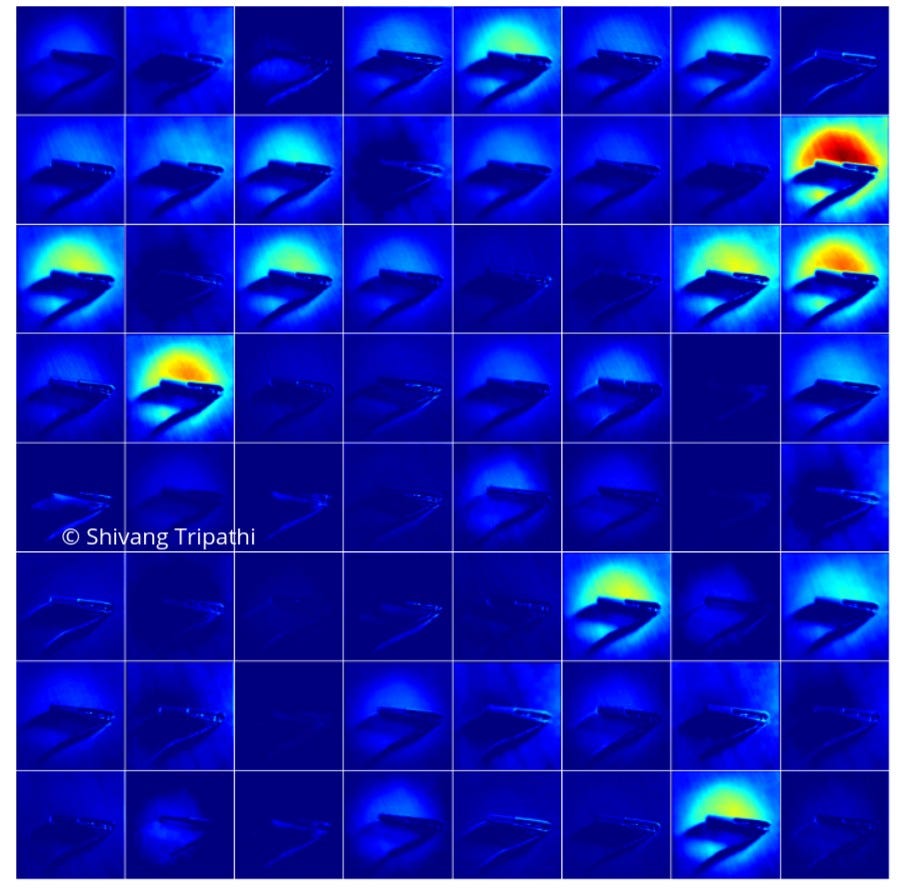
Output Activation from Convolutional layer near input layer
Discussion
It was interesting to see the classification accuracy improvement over the epochs as the network was finetuned by SGD.


performance of a snapshotted earlier epoch less tuned network having a hard time classifying
When training was started with only 25 images in each class to test the effect of less data on the network, the network was able to classify the Nothing class but could not differentiate between the Wallet and Mouse. This was because the objects Wallet and Mouse were almost identical in terms of:
- Color
- Surface shine
This is the reason more data had to be collected for these 2 classes to As it can be seen from the earlier epochs snapshot of the model, there is more problem classifying between Wallet and Mouse than the nailCutter. As the epochs increased, this problem was minimized as the network got better at classification by learning the underlying patterns in the image.
Accuracy vs Inference Time
As the accuracy increase,
- The number parameters required increases leading to a bigger sized network.
- More parameters mean more time to train the network.
- The bigger network will be difficult to deploy on the embedded system which comes with less computing power.
But the higher accuracy means better classification. This can be a dependable and reliable solution that can handle a wider spectrum of data.
To reduce the inference time, the network needs to be smaller, i.e, less number of network parameters.
- This narrows the learning capability of the network.
Therefore, the trade-off between accuracy and inference time needs to be made. This should be highly dependent on the task at hand.
If a general solution is needed that can infer from the wide range of data inputs with the network running with good compute power on a workstation, accuracy can be increased.
If a very task-specific solution is needed, that needs to work fast on the embedded system with limited computing power in real time, the inference time should be reduced to be in the order of milliseconds.
Conclusion
The project good results in the supplied as well as the custom self-acquired data. This was essentially a result of:
- Quality data collection of the objects.
- Smooth and fast development of ideas using the Nvidia DIGITS workflow.
- And most importantly, transfer learning which enabled one with limited data and compute power to build a good classification network.
This inference model can be deployed on a small robotic arm that can manipulate everyday objects on the table. The problems with this approach is that:
- Since no depth information is available, it will be difficult to manipulate the table objects as the trajectory calculations depend on the final pose to be reached.
- Finer manipulations will require the computation the grasping pose that is still a open area of research.
Future Work
In the future, rather than using a classification network, a detection network can be used to output the object coordinates in the image. Although this would require each image in the dataset to be annotated with a bounding box.
Also, it will be interesting to see the performance of such networks with the point cloud data to LIDARs, stereographic and RGB-D camera.