
AlignedReID : 最短路徑的理解
阿新 • • 發佈:2019-01-03
論文讀完以後,一直也沒有仔細思考動態對齊的細節實現,如何直觀的理解Face++提出的AlignedReID最短路徑的原理和演算法,我們直接用圖來解釋。
動態規劃
如圖所示,乍一看,這條最短路徑上有一些邊是冗餘的,例如圖中的第一條邊。為什麼不只尋找那些匹配的邊呢?作者給出的解釋是這樣的:區域性資訊不僅要自我匹配,也要考慮到整個人體對齊的程序。為了使匹配能夠從頭到腳按順序進行,那麼有一些冗餘的匹配是必須的。另外,通過設計區域性距離函式,這些冗餘匹配在整個最短路徑的長度中貢獻很小。
動態規劃實際是為了解決兩幅影象之間的 Part對齊問題,如圖 [part1]<->[part4]
1)Part model能夠對目標特徵進行細粒度刻畫,是非常必要的
2)最短路徑包含非相關特徵(如part1<->part1),這非但不會對結果造成影響,而且還會對維護垂直方向對齊的次序起著至關重要的作用。
即 路徑規劃本身隱含了自上而下的順序。
注:非相關特徵距離d比較大,其梯度接近於0,因此對於最短路徑的貢獻是比較小的。
有興趣的同學可以參考下面的公式證明一下。
3)路徑規劃過程
先來看part距離公式(H表示水平劃分,文中已驗證最好的H=6):

規劃從(1,1)到(H,H)的最短路徑,參考公式:
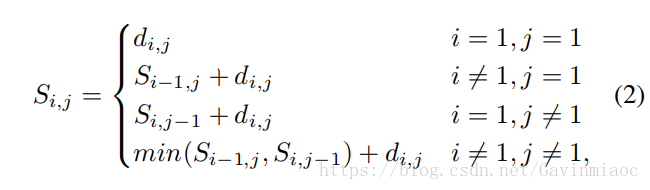
規劃得到的SH,H最短路徑即是兩幅影象最佳的Local 匹配。
下面給出詳細過程圖解:



如何從公式和模型的角度出發看最短路徑的由來?

參考文獻:
1.https://zhuanlan.zhihu.com/p/31521408
2.https://blog.csdn.net/gavinmiaoc/article/details/80333077