
pixhawk串列埠讀取感測器資料
阿新 • • 發佈:2019-01-03
1、 Pixhawk板上串列埠說明:
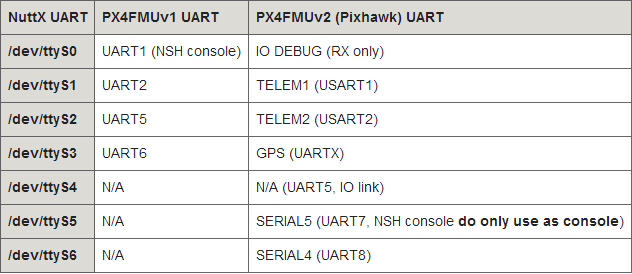
測試使用Pixhawk板上TELEM2介面的USART2,對應的Nuttx UART裝置檔案尾
/dev/ttyS2: 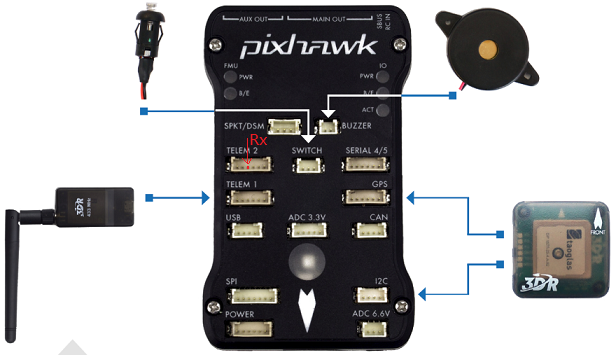
2 讀取資料測試
步驟:
- 在
Firmware/src/modules中新增一個新的資料夾,命名為rw_uart - 在
rw_uart資料夾中建立CMakeLists.txt檔案,並輸入以下內容:
px4_add_module(
MODULE modules__rw_uart
MAIN rw_uart
COMPILE_FLAGS
-Os
SRCS
rw_uart.c
DEPENDS
platforms__common
)
這是CMake的編譯指令碼 - 在
rw_uart資料夾中建立rw_uart.c檔案 - 註冊新新增的應用到NuttShell中。/src/Firmware/cmake/configs/nuttx_px4fmu-v2_default.cmake檔案中新增如下內容:
modules/rw_uart
- 在
上面表示把rw_uart.c編譯成可以在nuttx裡面執行的程式。
rw_uart.c
#include <stdio.h> #include <termios.h> #include <unistd.h> #include <stdbool.h> #include <errno.h> #include <drivers/drv_hrt.h> #include <string.h> #include <systemlib/err.h> #include <systemlib/systemlib.h> #include <fcntl.h> #include <sys/types.h> #include <sys/stat.h> __EXPORT int rw_uart_main(int argc, char *argv[]); int set_uart_baudrate(const int fd, unsigned int baud); int set_uart_baudrate(const int fd, unsigned int baud) { int speed; switch (baud) { case 9600: speed = B9600; break; case 19200: speed = B19200; break; case 38400: speed = B38400; break; case 57600: speed = B57600; break; case 115200: speed = B115200; break; default: warnx("ERR: baudrate: %d\n", baud); return -EINVAL; } struct termios uart_config; int termios_state; /* fill the struct for the new configuration */ tcgetattr(fd, &uart_config); /* clear ONLCR flag (which appends a CR for every LF) */ uart_config.c_oflag &= ~ONLCR; /* no parity, one stop bit */ uart_config.c_cflag &= ~(CSTOPB | PARENB); /* set baud rate */ if ((termios_state = cfsetispeed(&uart_config, speed)) < 0) { warnx("ERR: %d (cfsetispeed)\n", termios_state); return false; } if ((termios_state = cfsetospeed(&uart_config, speed)) < 0) { warnx("ERR: %d (cfsetospeed)\n", termios_state); return false; } if ((termios_state = tcsetattr(fd, TCSANOW, &uart_config)) < 0) { warnx("ERR: %d (tcsetattr)\n", termios_state); return false; } return true; } int rw_uart_main(int argc, char *argv[]) { char data = '0'; char buffer[4] = ""; int uart_read = open("/dev/ttyS2", O_RDWR | O_NOCTTY);//開啟串列埠裝置 if (uart_read < 0) { err(1, "failed to open port: %s", "/dev/ttyS2"); return -1; } if(false == set_uart_baudrate(uart_read,9600)){ printf("[YCM]set_uart_baudrate is failed\n"); return -1; } printf("[YCM]uart init is successful\n"); while(true){ read(uart_read,&data,1); if(data == 'R'){ for(int i = 0;i <4;++i){ read(uart_read,&data,1);//讀取串列埠資料 buffer[i] = data; data = '0'; } printf("%s\n",buffer); } } return 0; }
編譯並刷韌體
make clean
make px4fmu-v2_default
make up
檢視app
在NSH終端中輸入help,在Builtin Apps中出現rw_uart應用。
執行rw_uart應用(前提是模組與Pixhawk連線好)
在NSH終端中輸入rw_uart,回車,檢視串列埠資料的列印資料(TELEM2介面的USART2)。
以上就是簡單的PIX裡面的應用程式。可以從串列埠讀取到資料到內部,可以看到避開了複雜的微控制器配置過程,還是很方便的。
/src/ROMFS/init.d/rc_mc_app下新增子啟動
//mcu_avoid start /dev/ttyS6
//laser_gun start /dev/ttyS3
//laser_gun_shoot start /dev/ttyS3