掃地機器人演算法的一些想法和測試
阿新 • • 發佈:2019-01-04
這幾年掃地機器人越來越火,其路徑規劃由最初隨機演算法,到簡單規劃演算法,再到鐳射slam以及視覺slam演算法等,代表機器人國外有irobot等幾家公司,國內有科沃斯等,最近嘗試了一下最基本的模擬,其他功能後續完善。
----------------------------------------------------------------------------------------------------------------------------------------------------------
課題1:室內清掃機器人路徑規劃演算法
研究物件:兩輪差動的移動機器人
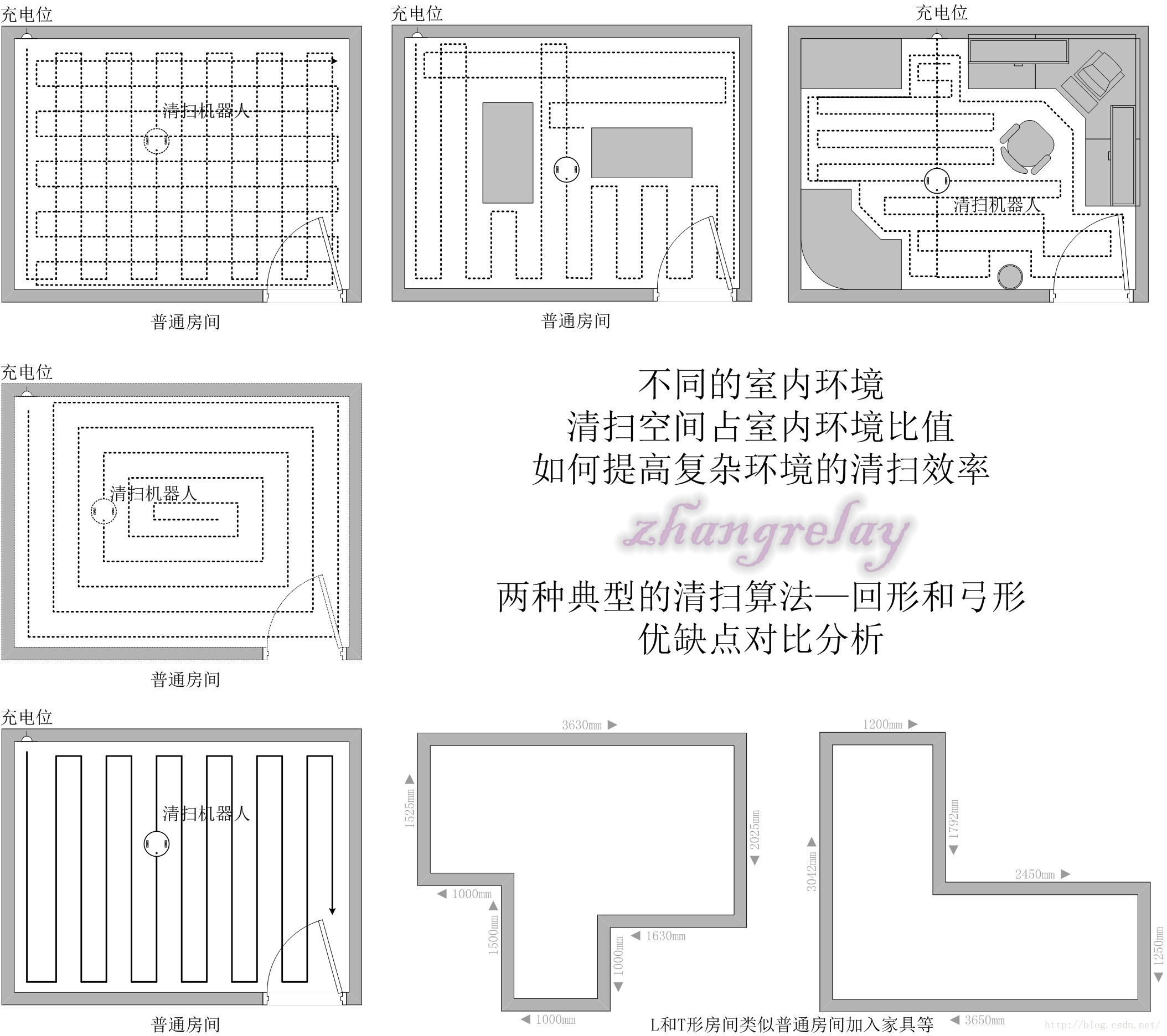
研究內容:室內環境,機器人區域覆蓋演算法。解釋:清掃機器人的路徑規劃,就是在可自由移動空間的全區域覆蓋,即對區域覆蓋演算法的研究。
研究目的:在室內環境下,尋找一條無碰撞的清掃機器人路徑規劃,環境對於機器人而言是未知的,首先是清掃區域的最大化,清掃效率達90%,即在室內環境可移動範圍內區域覆蓋要達到90%,在完成上述基本指標後,對清掃效率進行優化,使在完成同樣清掃效率的情況下,清掃時間逐漸縮短。簡言之,空間最大化,時間最小化。
研究方法:融合測距感測器和碰撞感測器的避障演算法,清掃策略的選擇等。
研究草案需要思考:
1.機器人包括感測器(真實或虛擬)、執行器(電機)和控制器(MCU或演算法核心):
2.數學模型:
3.物理模型:
4.兩輪差動機器人運動學模型:
5.路徑規劃與速度之間的關係:
6.感測器感知環境和自身資訊:
7.路徑規劃策略:
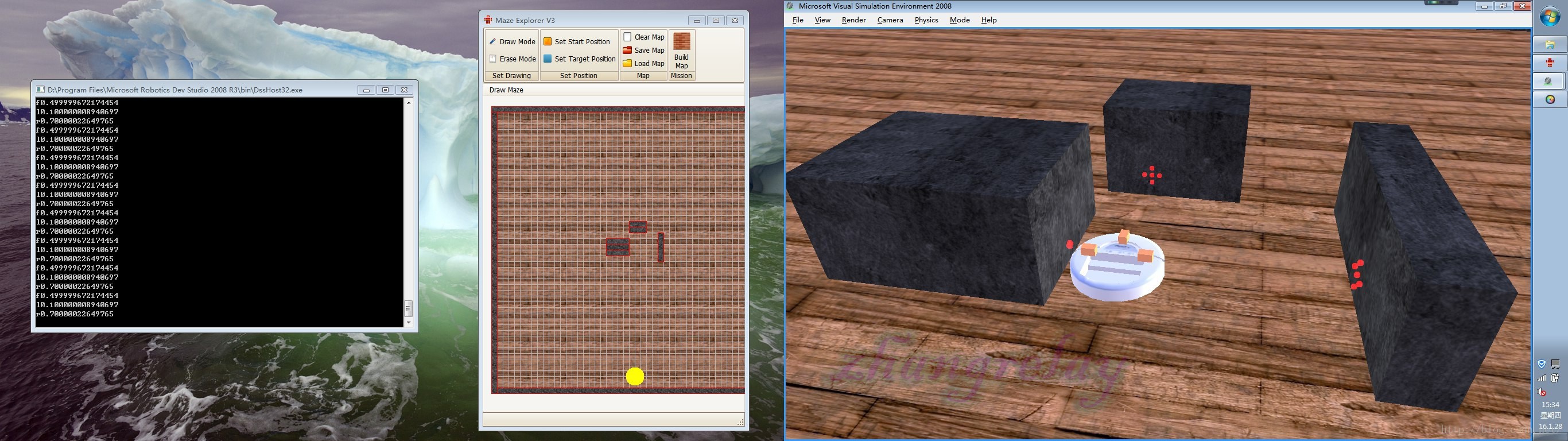
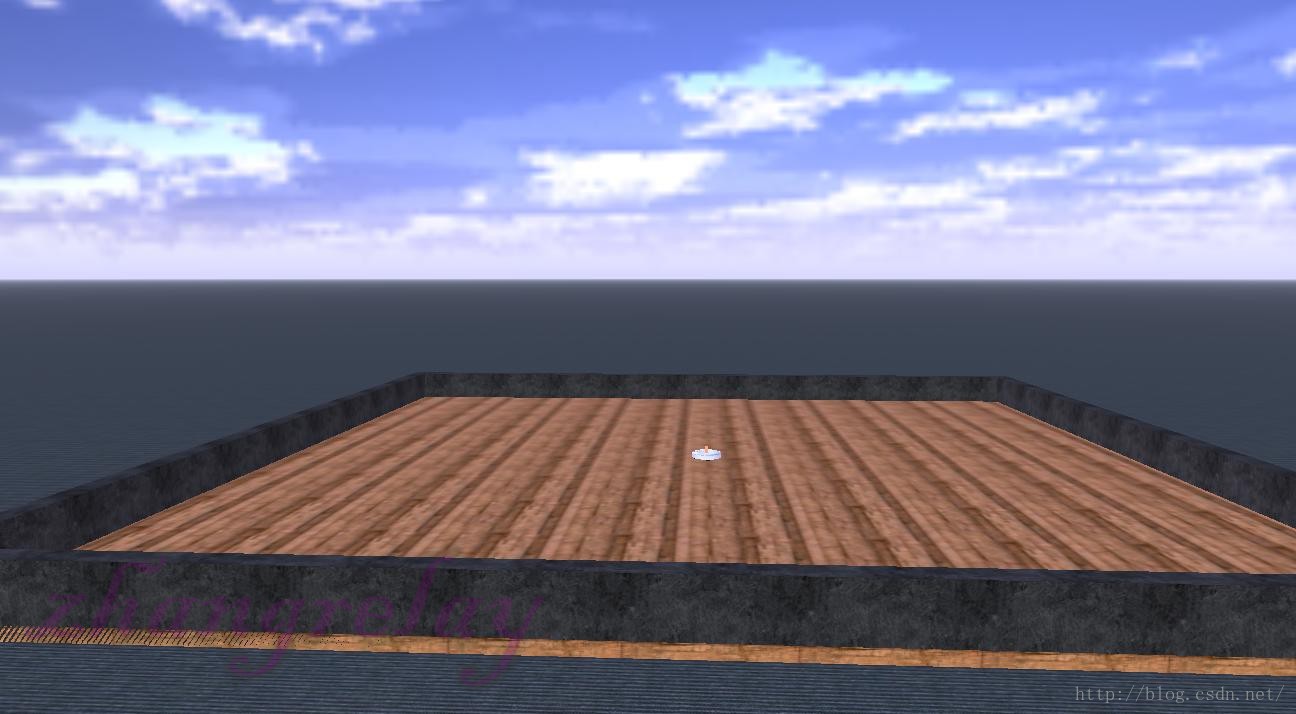
基本效能測試標準化環境:
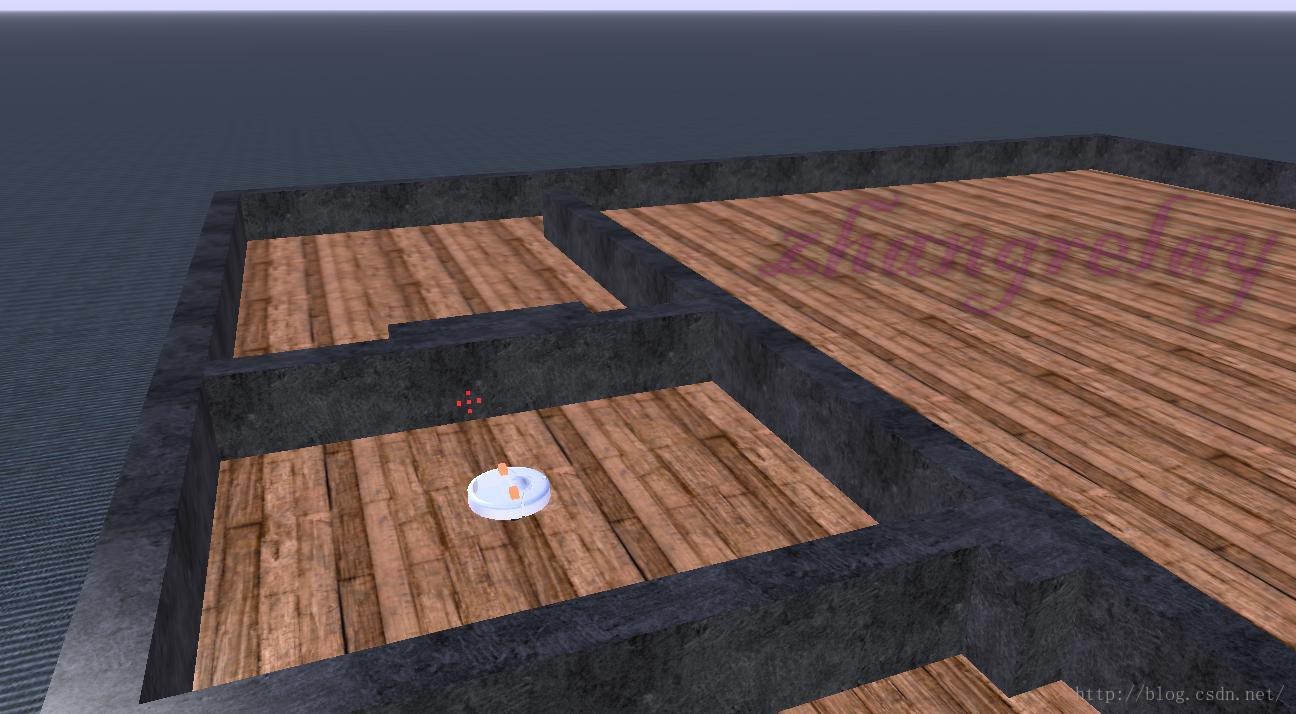
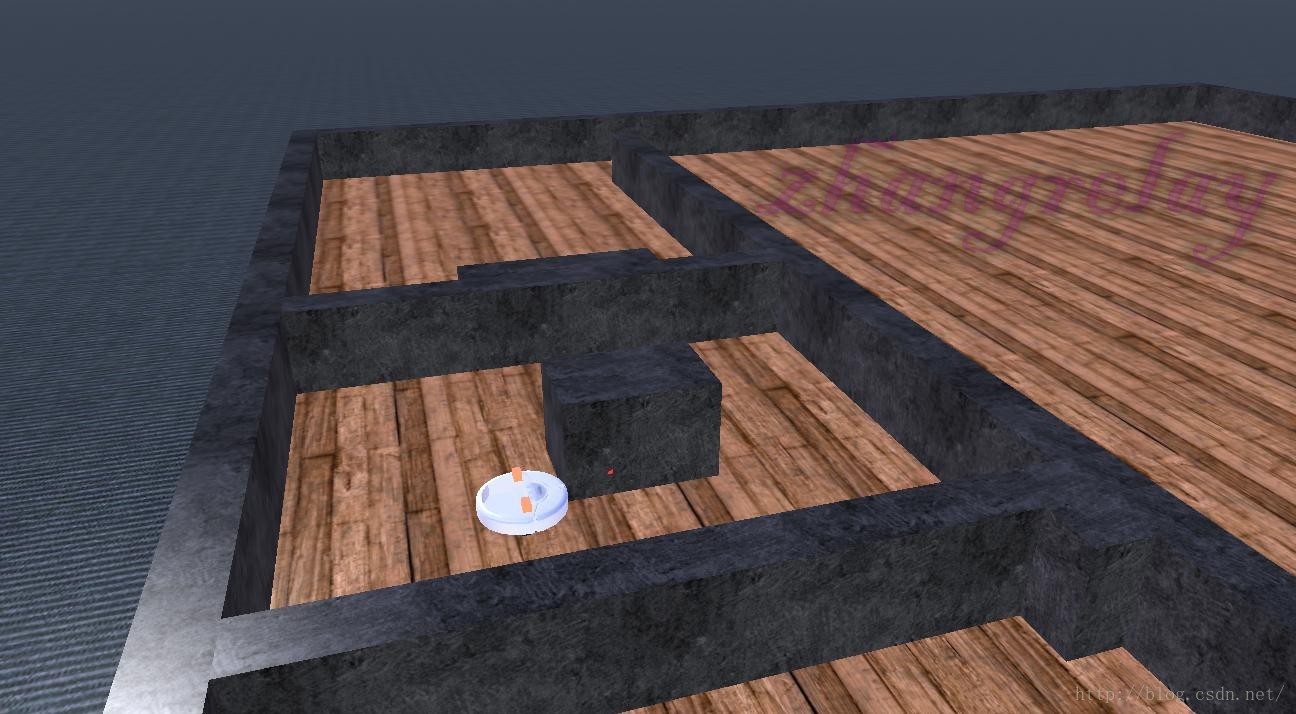
常用室內環境: