
機器人學——估計與學習-第四周
阿新 • • 發佈:2019-01-04
4.1 Belief state in 2D
4.1.1 Introduction
How robots can keep track of where they are in space and time using these particle filter algorithms to represent their uncertainty.
1) explore how robots represent the pose, that is where they're located and how they can estimate this over time using a localization algorithm.
2) given a map, how can we use the information in the map to help us build up this registration of the pose to the map;
3) explore a canonical algorithm called the particle filter which robots can use to estimate their localization information using sensors.
4.1.2 Odometry Modeling
幾種常見的定位方式
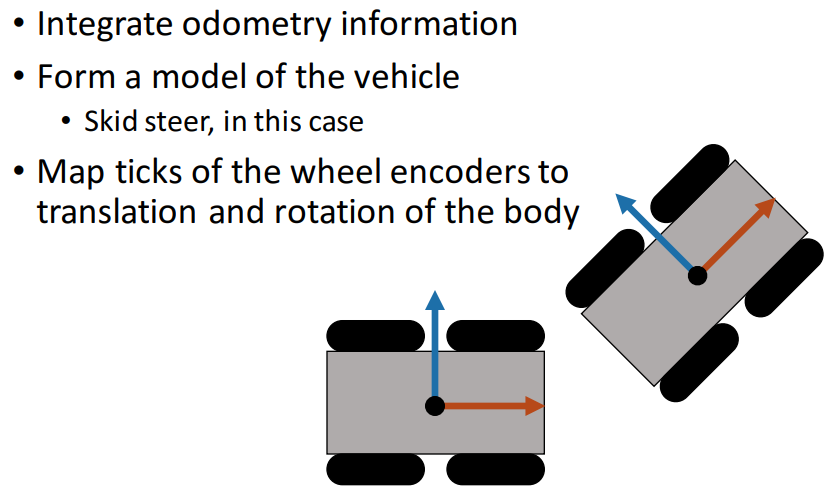
里程計更新方式與機器人模型相關。
以差速小車為例子,介紹一種簡單的里程計實現方法。
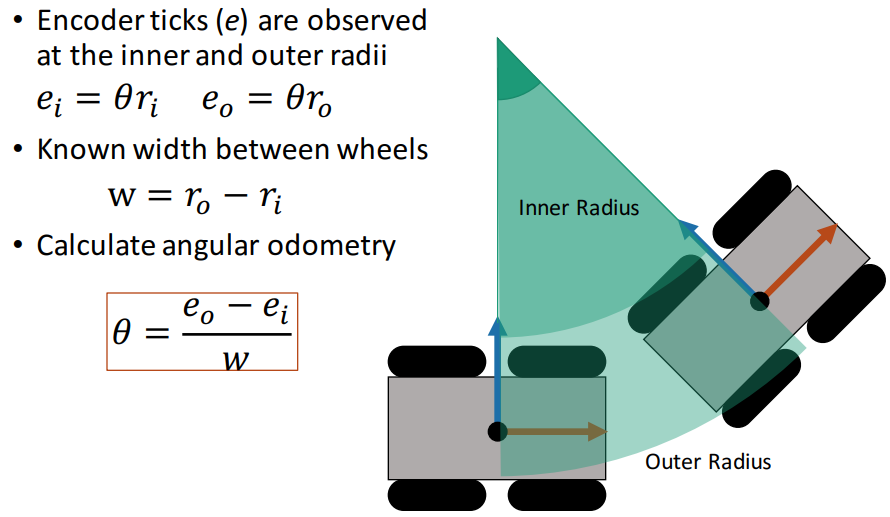
從編碼器可以讀取內、外側輪子的運動距離,即機器人轉彎的內、外弧長;結合已知的內外側輪子距離,可以計算轉彎角度。
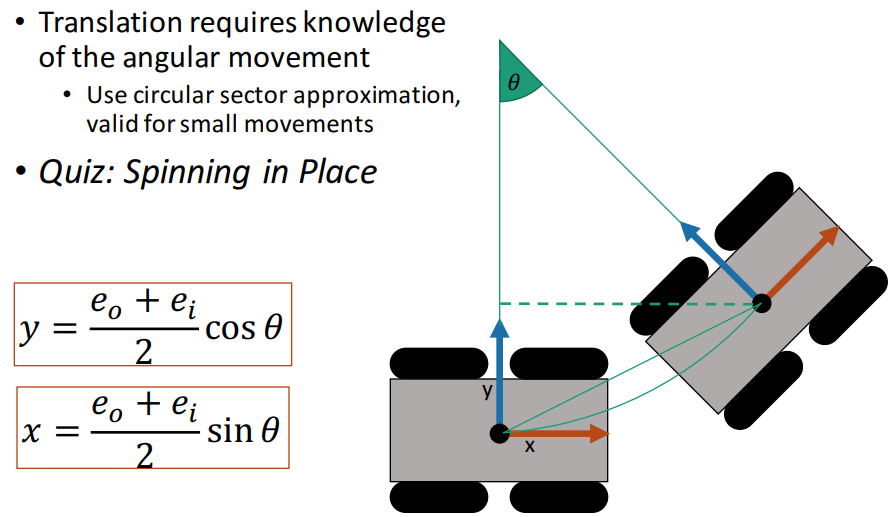
計算內、外弧長的平均值作為機器人座標系的弧長,並近似為扇形邊的長度。
x、y的計算公式善存疑問。
由於輪子滑移,結合陀螺儀計算機器人的轉彎角度
4.2 Map Registration
4.3 Particle Filters