
OpenCV的ORB特徵提取演算法
阿新 • • 發佈:2019-01-04
看到OpenCV2.3.1裡面ORB特徵提取演算法也在裡面了,套用給的SURF特徵例子程式改為ORB特徵一直提示錯誤,型別不匹配神馬的,由於沒有找到示例程式,只能自己找答案。
(ORB特徵論文:ORB: an efficient alternative to SIFT or SURF.點選下載論文)
經過查詢發現:
描述符資料型別有是float的,比如說SIFT,SURF描述符,還有是uchar的,比如說有ORB,BRIEF
對於float 匹配方式有:
FlannBased
BruteForce<L2<float> >
BruteForce<SL2<float> >
BruteForce<L1<float> >
對於uchar有:
BruteForce<Hammin>
BruteForce<HammingLUT>
BruteForceMatcher< L2<float> > matcher;//改動的地方
BruteForceMatcher< L2<float> > matcher;//改動的地方
完整程式碼如下:
#include <iostream> #include "opencv2/core/core.hpp" #include "opencv2/features2d/features2d.hpp" #include "opencv2/highgui/highgui.hpp" #include <iostream> #include <vector> using namespace cv; using namespace std; int main() { Mat img_1 = imread("D:\\image\\img1.jpg"); Mat img_2 = imread("D:\\image\\img2.jpg"); if (!img_1.data || !img_2.data) { cout << "error reading images " << endl; return -1; } ORB orb; vector<KeyPoint> keyPoints_1, keyPoints_2; Mat descriptors_1, descriptors_2; orb(img_1, Mat(), keyPoints_1, descriptors_1); orb(img_2, Mat(), keyPoints_2, descriptors_2); BruteForceMatcher<HammingLUT> matcher; vector<DMatch> matches; matcher.match(descriptors_1, descriptors_2, matches); double max_dist = 0; double min_dist = 100; //-- Quick calculation of max and min distances between keypoints for( int i = 0; i < descriptors_1.rows; i++ ) { double dist = matches[i].distance; if( dist < min_dist ) min_dist = dist; if( dist > max_dist ) max_dist = dist; } printf("-- Max dist : %f \n", max_dist ); printf("-- Min dist : %f \n", min_dist ); //-- Draw only "good" matches (i.e. whose distance is less than 0.6*max_dist ) //-- PS.- radiusMatch can also be used here. std::vector< DMatch > good_matches; for( int i = 0; i < descriptors_1.rows; i++ ) { if( matches[i].distance < 0.6*max_dist ) { good_matches.push_back( matches[i]); } } Mat img_matches; drawMatches(img_1, keyPoints_1, img_2, keyPoints_2, good_matches, img_matches, Scalar::all(-1), Scalar::all(-1), vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS); imshow( "Match", img_matches); cvWaitKey(); return 0; }
另外: SURF SIFT
/* SIFT sift; sift(img_1, Mat(), keyPoints_1, descriptors_1); sift(img_2, Mat(), keyPoints_2, descriptors_2); BruteForceMatcher<L2<float> > matcher; */ /* SURF surf; surf(img_1, Mat(), keyPoints_1); surf(img_2, Mat(), keyPoints_2); SurfDescriptorExtractor extrator; extrator.compute(img_1, keyPoints_1, descriptors_1); extrator.compute(img_2, keyPoints_2, descriptors_2); BruteForceMatcher<L2<float> > matcher; */
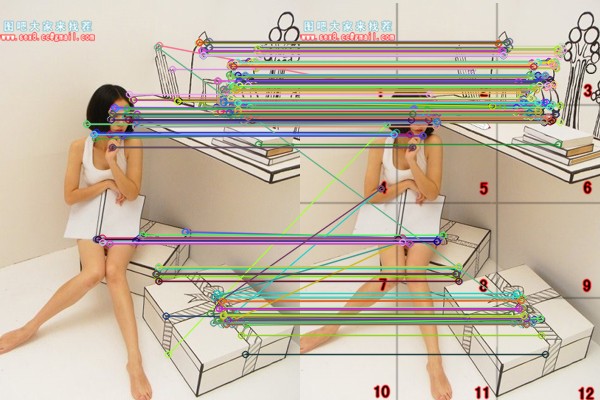
效果:
另外一個是尋找目標匹配
在右邊的場景圖裡面尋找左邊那幅圖的starbucks標誌
效果如下:

需要在之前的那個imshow之前加上如下程式碼即可完成一個簡單的功能展示:
// localize the object
std::vector<Point2f> obj;
std::vector<Point2f> scene;
for (size_t i = 0; i < good_matches.size(); ++i)
{
// get the keypoints from the good matches
obj.push_back(keyPoints_1[ good_matches[i].queryIdx ].pt);
scene.push_back(keyPoints_2[ good_matches[i].trainIdx ].pt);
}
Mat H = findHomography( obj, scene, CV_RANSAC );
// get the corners from the image_1
std::vector<Point2f> obj_corners(4);
obj_corners[0] = cvPoint(0,0);
obj_corners[1] = cvPoint( img_1.cols, 0);
obj_corners[2] = cvPoint( img_1.cols, img_1.rows);
obj_corners[3] = cvPoint( 0, img_1.rows);
std::vector<Point2f> scene_corners(4);
perspectiveTransform( obj_corners, scene_corners, H);
// draw lines between the corners (the mapped object in the scene - image_2)
line( img_matches, scene_corners[0] + Point2f( img_1.cols, 0), scene_corners[1] + Point2f( img_1.cols, 0),Scalar(0,255,0));
line( img_matches, scene_corners[1] + Point2f( img_1.cols, 0), scene_corners[2] + Point2f( img_1.cols, 0),Scalar(0,255,0));
line( img_matches, scene_corners[2] + Point2f( img_1.cols, 0), scene_corners[3] + Point2f( img_1.cols, 0),Scalar(0,255,0));
line( img_matches, scene_corners[3] + Point2f( img_1.cols, 0), scene_corners[0] + Point2f( img_1.cols, 0),Scalar(0,255,0));