
python程式碼實現狄克斯特拉演算法
阿新 • • 發佈:2019-01-04
狄克斯特拉演算法找最短路徑問題:
之前我們瞭解過,用廣度優先搜尋,找出段數最少的路徑,但是要找出最快的路徑該怎麼做呢,為此我們可以用現在提到的演算法,狄克斯特拉演算法。
我們知道,狄克斯特拉算的輔助圖形必須是有向無環加權圖,這也就決定了該演算法的使用條件。
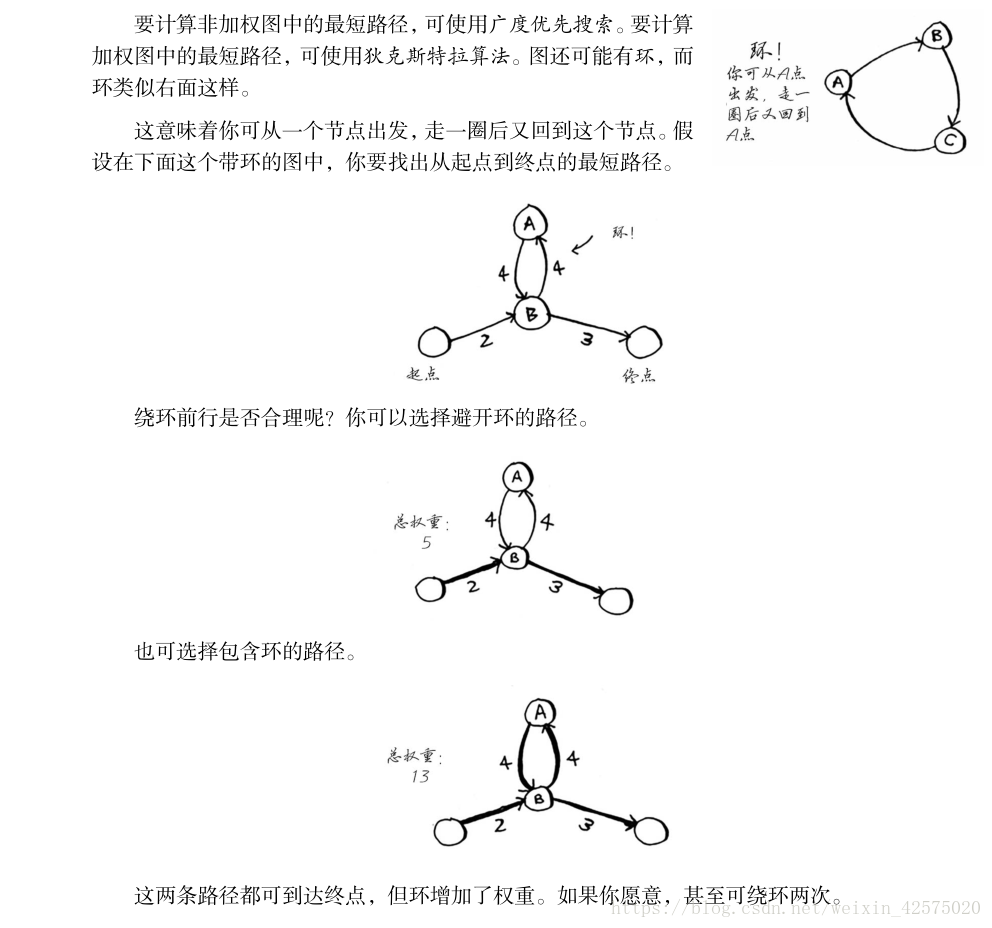
那什麼是有向無環加權圖呢?下面舉個例子說明一下

另外,值得注意的是:狄克斯特拉演算法同樣不適用於含有負權邊的圖,即是,圖上的數字不能為負值。
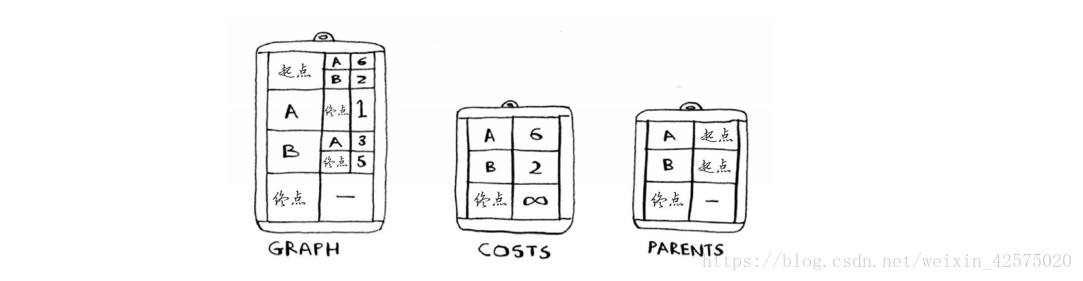
要實現演算法需要一下準備工作,首先需要三個散列表,就是python的字典。
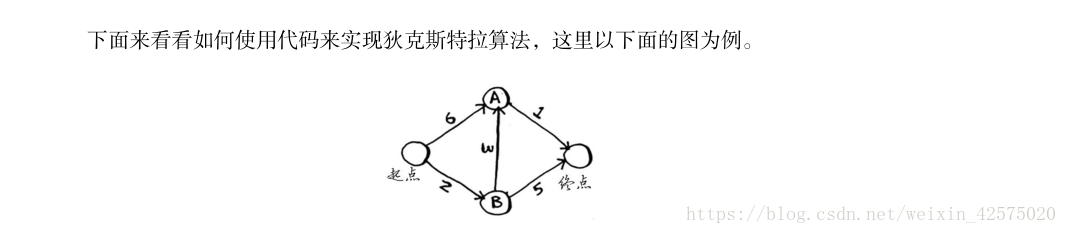
然後我們來看一下程式碼流程

接下來直接上程式碼:
def find_lowest_cost_node(costs): lowest_cost = float("inf") lowest_cost_node = None for node in costs: <---------遍歷所有的節點 cost = costs[node] if cost < lowest_cost and node not in processed: <----如果當前節點的開銷更低且未處理過 lowest_cost = cost <--------將其視為開銷最低的節點 lowest_cost_node = node return lowest_cost_node 這是找出獲取花費最低節點的函式 node = find_lowest_cost_node(costs) <------在未處理的節點中找出開銷最小的節點 while node is not None: <-----這個while迴圈在所有節點都被處理過後結束 cost = costs[node] neighbors = graph[node] for n in neighbors.keys(): <---遍歷當前節點的所有鄰居 new_cost = cost + neighbors[n] if costs[n] > new_cost: <------如果經當前節點前往該鄰居更近, costs[n] = new_cost <----就更新該鄰居的開銷 parents[n] = node <-----同時將該鄰居的父節點設定為當前節點 processed.append(node) <------將當前節點標記為處理過 node = find_lowest_cost_node(costs) <---找出接下來要處理的節點,並迴圈