
學習Sobel運算元-邊緣檢測
Sobel濾波原理
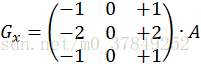
Sobel 濾波,也稱Sobel運算元,是畫素邊緣檢測中最重要的運算元之一,在機器學習、數字媒體、計算機視覺等資訊科技領域起著舉足輕重的作用。邊緣點其實是影象灰度跳變劇烈的點,所以先計算梯度影象,然後將梯度影象中較亮的那一部分提取出來就是簡單的邊緣部分。根據該原理,Sobel運算元首先用兩組3×3的濾波器分別對影象橫向及縱向進行濾波,從而得到橫向和縱向的梯度影象(亮度差分近似值)。若A表示原始影象,和
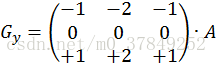
分別代表經橫向及縱向邊緣檢測的影象,其公式如下:
|
|
(1) |
|
|
(2) |
影象的每一個畫素的橫向及縱向梯度近似值可用結合。然後計算梯度方向:
。此外,計算梯度影象時一般會使用
,用絕對值消除梯度方向的影響。
相關推薦
學習Sobel運算元-邊緣檢測
Sobel濾波原理 Sobel 濾波,也稱Sobel運算元,是畫素邊緣檢測中最重要的運算元之一,在機器學習、數字媒體、計算機視覺等資訊科技領域起著舉足輕重的作用。邊緣點其實是影象灰度跳變劇烈的點,所以先計算梯度影象,然後將梯度影象中較亮的那一部分提取出來就是簡單的邊緣部分
車道線檢測之-sobel運算元邊緣檢測原理介紹
sobel運算元是canny邊緣檢測的核心,也是車道線檢測的中心,所以弄清其原理很重要。 要理解sobel邊緣檢測,首先弄清楚一點影象每一點的畫素值是一個和x,y都相關的值,即f(x,y), 任意給定的x和y都可以索引到一個畫素值。 下圖一代表了一個普通的影象,
Opencv2.4學習::邊緣檢測(4)Roberts運算元
邊緣檢測 1、Sobel 2、Laplace 3、Roberts 4、 Roberts 就是以對角線作為差分的方向來檢測 實現程式碼: #include<opencv2/core/core.hpp> #include<opencv2
Python 影象處理 OpenCV (12): Roberts 運算元、 Prewitt 運算元、 Sobel 運算元和 Laplacian 運算元邊緣檢測技術
 前文傳送門: [「Python 影象處理 OpenCV (1):入門」](https://www.geekdigging.com/2020/05/17/5513454552/) [「Pyt
【轉】Python+opencv利用sobel進行邊緣檢測(細節講解)
#! usr/bin/env python # coding:utf-8 # 2018年7月2日06:48:35 # 2018年7月2日23:11:59 import cv2 import numpy as np import matplotlib.pyplot as plt img = cv2
LoG、DoG運算元--邊緣檢測運算元(噪聲不敏感)
1、LoG運算元 Laplace運算元是一種優秀的邊緣檢測運算元,通過對影象求二階導數,然後通過二階導數的0交叉點來實現邊緣檢測。因為Laplace運算元對噪聲敏感,故可在進行Laplace計算之前用高斯濾波來進行降噪處理,這樣就形成了拉普拉斯高斯運算元LoG(Laplace of Ga
【OpenCV學習】Canny邊緣檢測
影象的邊緣檢測的原理是檢測出影象中所有灰度值變化較大的點,而且這些點連線起來就構成了若干線條,這些線條就可以稱為影象的邊緣。 Canny邊緣檢測運算元是John F. Canny於 1986 年開發出來的一個多級邊緣檢測演算法。Canny 邊緣檢測的數學原理
第六節--基於Sobel的邊緣檢測C++程式的實現
/********************************************************************************************************** *函式原型:BOOL CImgProcess::Ed
【2017年10月最新深度學習方面的邊緣檢測論文和程式碼】【CASENet:深度類別感知語義邊緣檢測】
【CASENet:深度類別感知語義邊緣檢測】《CASENet: Deep Category-Aware Semantic Edge Detection》Z Yu, C Feng, M Liu, S Ramalingam [CMU & Mitsubishi Elec
Canny運算元邊緣檢測
1.Canny邊緣檢測基本原理(1)圖象邊緣檢測必須滿足兩個條件:一能有效地抑制噪聲;二必須儘量精確確定邊緣的位置。(2)根據對信噪比與定位乘積進行測度,得到最優化逼近運算元。這就是Canny邊緣檢測運算元。(3)類似與Marr(LoG)邊緣檢測方法,也屬於先平滑後求導數的方法。2.Canny邊緣檢測演算法:
Opencv學習之影象邊緣檢測
該部落格只為記錄點滴所學,若有誤導,還請大家原諒,並不吝賜教。 一直不太明白應用函式求導的方法能求出影象強度變化的邊緣,其實就是影象邊緣檢測。現在終於想通了,解釋如下。比如一張如下的圖片: 圖1 檢測邊緣可以檢測到狗和兔子的輪廓。因為它們的輪廓跟其周
dsp影象處理Prewitt運算元邊緣檢測
——(完整工程檔案到我的資源下載) Prewitt運算元邊緣檢測 一、實驗背景與意義 影象處理就是對資訊加工以滿足人的視覺心理或應用需求的方法。影象處理的方法有光學方法和電子學方法。從20世紀60年代起隨著電子計算機和計算技術的不斷提高和普及,數字影象處理進入了高速發展時期,而數字影象處理就是利用數字計算機
Opencv影象識別從零到精通(21)-----canny運算元邊緣檢測
最後來看看canny運算元,這個是被成為最好的運算元,因為過程多,有準測,後面會列出來,也是邊緣檢測的最後一個,所以這裡作為結尾,來看看各個邊緣檢測的效果。 邊緣檢測結果比較
Python 影象處理 OpenCV (13): Scharr 運算元和 LOG 運算元邊緣檢測技術
 前文傳送門: [「Python 影象處理 OpenCV (1):入門」](https://www.geekdigging.com/2020/05/17/5513454552/) [「Pyt
我的CUDA學習之旅4——Sobel運算元影象邊緣檢測CUDA實現
引言 關於影象邊緣檢測,記得剛開始接觸影象處理時,第一個自己實現的程式是通過筆記本攝像頭採集影象,利用OpenCV自帶的演算法庫進行Canny運算元邊緣檢測,那時候當看到程式執行後,視訊視窗實時顯示經Canny運算元邊緣分割後的影象,覺得十分有科技感,後來慢慢
梯度與邊緣檢測常用運算元:Roberts、Prewitt、Sobel、LOG,Canny、Lapacian運算元
原文:https://blog.csdn.net/swj110119/article/details/51777422 原文:https://blog.csdn.net/gdut2015go/article/details/46779251 幾種邊緣檢測運算元的比較Robert
Python OpenCV _5邊緣檢測(Sobel運算元,Laplacian運算元,Canny運算元)
Python OpenCV這個初級影象處理系列是參考他人的文章寫的,有些地方做了一些改動,沒有太多理論,側重程式碼實現,主要目的是將這些基本操作程式碼系統地梳理一遍,也是為了以後能快速查詢。 此係列原始碼在我的GitHub裡:https://github.com/yeyujujishou19/P
5.4.2 邊緣檢測-sobel運算元
Sobel運算元也是一種常用的梯度運算元。Sobel運算元計算稍微複雜,它採用3x3的模板。計算時模板在影象上移動,並在每個位置上計算對應中心畫素的梯度值。 VTK中vtkSobel2D計算影象的sobel運算元,使用程式碼如下: /*-----------------------
OpenCV3邊緣檢測:Canny運算元/Sobel運算元/Laplace運算元/Scharr濾波器
邊緣檢測的一般步驟 1)濾波:邊緣檢測的演算法主要是基於影象強度的一階和二階導數,但導數通常對噪聲很敏感,因此必須採用濾波器來改善與噪聲有關的邊緣檢測器的效能。常見的濾波方法主要有高斯濾波,即採用離散化的高斯函式產生一組歸一化的高斯核(具體見“高斯濾波原理及其程式設計離散化實現方法”
影象邊緣檢測——幾種影象邊緣檢測運算元的學習及python 實現
本文學習利用python學習邊緣檢測的濾波器,首先讀入的圖片程式碼如下: import cv2 from pylab import * saber = cv2.imread("construction.jpg") saber = cv2.cvtColor(saber,cv2.COLOR_BGR2RG