
Discrete Difference Equation Prediction Model (DDEPM)
阿新 • • 發佈:2019-01-05
Discrete Difference Equation Prediction Model (DDEPM)
離散差分方程預測模型從灰度預測模型(grey prediction model)衍生出來,可以用於預測序列的發展趨勢。
DDEPM過程
DDEPM的流程如下圖所示
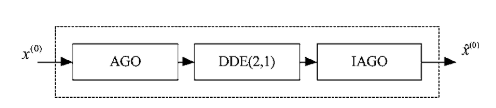
其中 表示原始的序列, 表示DDEPM預測值。AGO表示累加生成器(Accumulated Generating Operation)用於預處理原始序列 ,把 轉變成指數增長的序列。對原始序列應用一次AGO(1-AGO)就足夠生成一個指數增長序列。接下來構造一個單一變數的二階離散差分方程(DDE(2,1))來擬合1-AGO生成的序列。通過DDE(2,1)可以預測序列中未知的元素值。因為DDE(2,1)預測的是AGO生成的序列,因此需要把預測結果還原,方法就是IAGO (Inverse Accumulated Generating Operation)。最後得到的就是原始序列的預測結果。
(1)獲取n個原始序列資料
其中
表示有n個元素的元素序列,
表示原始序列的第n個元素。
(2)AGO
生成指數增長序列
其中
只對原序列進行一次AGO操作,因此稱 為1-AGO序列。
因為要生成指數增長序列,所以原序列不能有負數元素,否則上述公式不能生成指數增長序列。
(3)DDE(2, 1)
使用單一變數的二階離散差分公式生成DDE(2, 1)來擬合1-AGO序列
其中a和b是係數,為了確定a和b,我們使用最小二乘法。我們把公式(3)重寫成
讓
,接著公式(4)變為