
網路流總結(二)二分圖
相關概念:
二分圖:一個圖被分成兩部分,相同的部分沒有邊
匹配:兩兩不含公共端點的邊的集合M稱為匹配
最大匹配:元素最多的M則稱為最大匹配
完美匹配:最大匹配數M滿足:2*M=V
對於二分圖的最大匹配問題,可以加上一個s,一個t,轉為求最大s-t流
二分圖的最小頂點覆蓋
定義:假如選了一個點就相當於覆蓋了以它為端點的所有邊。最小頂點覆蓋就是選擇最少的點(左右兩邊都可選)來覆蓋所有的邊。
方法:最小頂點覆蓋等於二分圖的最大匹配。
我們用二分圖來構造最小頂點覆蓋。
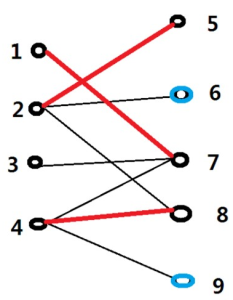
對於上面這個二分圖,頂點分為左右兩個集合,X集合包含1,2,3,4,Y集合包含5,6,7,8,9.假如現在我們已經找到一個最大匹配M,就是上面的紅線所標註的M={(1,7),(2,5),(4,8)}。我們作如下定義:(1)定義1、2、4、5、7、8為已經匹配過的點,其他點為未匹配的點;(2)定義(4,8)、(1,7)、(2,5)為已匹配的邊,其他邊為未匹配的邊。
下面我們從Y集合中找出未匹配的點,就是上面標記的6和9。每次我們從右邊選出一個未匹配的點,從該點出發, 做一條未匹配邊->匹配邊->未匹配邊->……->匹配邊(注意最後以匹配邊結尾),並且標記用到的點,得到下圖:

其中紫色的邊為我們剛才畫的邊,其中標記的點有2、4、5、6、8、9。 上圖的兩條路為:(1)9->4->8->2->5 (2)6->2->5。這兩條路都是未匹配邊->匹配邊->未匹配邊->……->匹配邊。(注意如果一個右側未匹配點有多條邊,那麼這樣的從該點開始的路徑就有多條,上面的6和9都只有一條邊,所以從每個點開始的這樣的路徑只有一條)。
現在我們將左側標記的點2、4和右側未標記的點7選出組成集合S, 那個S就是一個最小頂點覆蓋集,就是S集合可以覆蓋所有的邊。下面證明:
(1)|S|=M,即最小頂點覆蓋等於二分圖最大匹配:左邊標記的點全都為匹配邊的頂點,因為我們構造路徑的時候左邊的點向右找的邊都是最大匹配的邊;右邊未標記的點也為二分圖最大匹配邊的頂點。而且左邊標記的加上有邊未標記的正好是最大匹配的數目。
(2)S能覆蓋所有的邊。所有的邊可以分為下面三種情況:a、左端點標記、右端點標記;這些邊一定被左側標記的點覆蓋,比如上面的2,4;b、右端點未標記;這些邊一定被右側未標記的點覆蓋,比如上面的7;c、左端點未標記、右端點標記。
下面我們證明c這種邊壓根就不會存在:若c是最大匹配中的邊,由於右端點不可能是一條路徑的起點(因為我們的起點都是從Y集合中未匹配的點開始的),於是右端點的標記只能是在構造中從左邊連過來,這是左端點必定被標記了,這時c就轉化成了a;若c屬於未匹配邊,那麼左端點必定是一個匹配點,那麼c的右端點必定是一條路徑的起始點,因此c的左端點也會成為一條路徑的第二個點而被標記,這時c也就成了a。所以c這種邊肯定是不存在的。
(3)S是最小的頂點集:因為最大匹配為M,而|S|=M,所以如果S中的點再少,那麼連M個匹配的邊都不能覆蓋。
二分圖的最大獨立集
定義:選出一些頂點使得這些頂點兩兩不相鄰,則這些點構成的集合稱為獨立集。找出一個包含頂點數最多的獨立集稱為最大獨立集。
方法:最大獨立集=所有頂點數-最小頂點覆蓋

在上面這個圖中最小頂點覆蓋=3,即2,4,7構成最小頂點覆蓋,則其他點6個構成最大獨立集。且其他點不可能相連。假設其他點相連則這條邊必定沒有被2,4,7 覆蓋,與2,4,7是最小頂點覆蓋矛盾。因此其他點之間必定沒有邊。而2,4,7是最小頂點覆蓋,所謂最小就是不能再小了,因此我們的獨立集就是最大了。
二分圖的最大團
定義:對於一般圖來說,團是一個頂點集合,且由該頂點集合誘導的子圖是一個完全圖,簡單說,就是選出一些頂點,這些頂點兩兩之間都有邊。最大團就是使得選出的這個頂點集合最大。對於二分圖來說,我們預設為左邊的所有點之間都有邊,右邊的所有頂點之間都有邊。那麼,實際上,我們是要在左邊找到一個頂點子集X,在右邊找到一個頂點子集Y,使得X中每個頂點和Y中每個頂點之間都有邊。
方法:二分圖的最大團=補圖的最大獨立集。
補圖的定義是:對於二分圖中左邊一點x和右邊一點y,若x和y之間有邊,那麼在補圖中沒有,否則有。
這個方法很好理解,因為最大獨立集是兩兩不相鄰,所以最大獨立集的補圖兩兩相鄰。
二分圖求最大匹配模板:
poj 3041 - Asteroid
思路:
把光束當成頂點,行星當成連線對應光束的邊,這樣轉換後,求的是二分圖最小頂點覆蓋問題,也就是最大匹配問題。
程式碼一:
#include<iostream>
#include<cstdio>
#include<cstring>
#include<string>
#include<algorithm>
#include<cmath>
#include<queue>
using namespace std;
struct Edge{
int from,to,cap,flow;
Edge(int u,int v,int c,int f):from(u),to(v),cap(c),flow(f){}
};
const int INF=99999999,maxn=1100;
int n,k,s,t;
vector<Edge> edges;//存正邊和反向邊,邊數的兩倍
vector<int> G[maxn];//鄰接表,G[i][j]表示節點i的第j條邊在edges陣列中的序號
int a[maxn];//a[i]表示源點s到節點i的路徑上的最小殘留量
int p[maxn];//p[i]記錄i的前驅,是用在edges數組裡的序號表示的
/*void init(int n){
for(int i=0;i<n;i++){
G[i].clear();
}
edges.clear();
}*/
void AddEdge(int from,int to,int cap){
edges.push_back(Edge(from,to,cap,0));
edges.push_back(Edge(to,from,0,0));//反向弧
int m=edges.size();
G[from].push_back(m-2);
G[to].push_back(m-1);
}
int Maxflow(int s,int t){
int flow=0;
for(;;){
memset(a,0,sizeof(a));
queue<int> q;
q.push(s);
a[s]=INF;
while(!q.empty()){
int x=q.front();q.pop();
for(int i=0;i<G[x].size();i++){//x點對應的所有正向弧和反向弧
Edge& e=edges[G[x][i]];
if(!a[e.to]&&e.cap>e.flow){
p[e.to]=G[x][i];
a[e.to]=min(a[x],e.cap-e.flow);
q.push(e.to);
}
}
if(a[t])break;
}
if(!a[t])break;//如果找不到增廣路,則當前流已經是最大流
for(int u=t;u!=s;u=edges[p[u]].from){
edges[p[u]].flow+=a[t];//更新正向流量
edges[p[u]^1].flow-=a[t];//更新反向流量
}
flow+=a[t];//流加上
}
return flow;
}
int main(){
int r,c;
scanf("%d%d",&n,&k);
s=0,t=2*n+1;
for(int i=1;i<=n;i++){
AddEdge(s,i,1);
}
for(int i=n+1;i<=2*n;i++){
AddEdge(i,t,1);
}
for(int i=0;i<k;i++){
scanf("%d%d",&r,&c);
AddEdge(r,n+c,1);
}
printf("%d\n",Maxflow(s,t));
}程式碼二:
利用所有邊的容量都是1以及二分圖的性質,我們還可像下面這樣將二分圖的最大匹配演算法更簡單地實現
#include<iostream>
#include<cstdio>
#include<cstring>
#include<string>
#include<algorithm>
#include<cmath>
#include<queue>
using namespace std;
const int INF=99999999,maxv=1100;
int V;
vector<int> G[maxv];
int match[maxv];
bool used[maxv];
//向圖中增加一條連線u、v的邊
void add_edge(int u,int v){
G[u].push_back(v);
G[v].push_back(u);
}
//dfs找增廣路
bool dfs(int v){
used[v]=true;
for(int i=0;i<G[v].size();i++){
int u=G[v][i],w=match[u];
if(w<0||!used[w]&&dfs(w)){
match[v]=u;
match[u]=v;
return true;
}
}
return false;
}
//求解二分圖的最大匹配
int bipartite_matching(){
int res=0;
memset(match,-1,sizeof(match));
for(int v=0;v<V;v++){
if(match[v]<0){
memset(used,0,sizeof(used));
if(dfs(v)){
res++;
}
}
}
return res;
}
int main(){
int n,k,r,c;
scanf("%d%d",&n,&k);
V=n*2;
for(int i=0;i<k;i++){
scanf("%d%d",&r,&c);
add_edge(r-1,n+c-1);
}
printf("%d\n",bipartite_matching());
}