
人工智慧實踐:TensorFlow筆記學習(四)—— 神經網路優化
神經網路優化
大綱
4.1 損失函式
4.2 學習率
4.3 滑動平均
4.4 正則化
4.5 神經網路搭建八股
目標
掌握神經網路優化方法
4.1 損失函式
神經元模型:用數學公式表示為:
神經網路是以神經元為基本單元構成的。
啟用函式:引入非線性啟用因素,提高模型的表達力。
常用的啟用函式有relu、sigmoid、tanh等。
① 啟用函式relu: 在Tensorflow中,用tf.nn.relu()表示
relu()數學表示式 relu()數學圖形
② 啟用函式sigmoid:在Tensorflow中,用tf.nn.sigmoid()表示
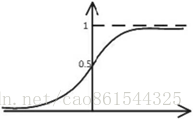
sigmoid ()數學表示式 sigmoid()數學圖形
③ 啟用函式tanh:在Tensorflow中,用tf.nn.tanh()表示


tanh()數學表示式 tanh()數學圖形
神經網路的複雜度:可用神經網路的層數和神經網路中待優化引數個數表示
神經網路的層數:一般不計入輸入層,層數 = n個隱藏層 + 1個輸出層
神經網路待優化的引數:神經網路中所有引數w的個數 + 所有引數b的個數
例如:

輸入層 隱藏層 輸出層
在該神經網路中,包含1個輸入層、1個隱藏層和1個輸出層,該神經網路的層數為2層。 在該神經網路中,引數的個數是所有引數w的個數加上所有引數b的總數,第一層引數用三行四列的二階張量表示(即12個線上的權重w)再加上4個偏置b;第二層引數是四行兩列的二階張量(即8個線上的權重w)再加上2個偏置b。總引數 = 3*4+4 + 4*2+2 = 26。
損失函式(loss):用來表示預測值(y)與已知答案(y_)的差距。在訓練神經網路時,通過不斷改變神經網路中所有引數,使損失函式不斷減小,從而訓練出更高準確率的神經網路模型。
常用的損失函式有均方誤差、自定義和交叉熵等。
均方誤差mse:n個樣本的預測值y與已知

在Tensorflow中用loss_mse = tf.reduce_mean(tf.square(y_ - y))
例如:預測酸奶日銷量 y,x1和 x2 是影響日銷量的兩個因素。應提前採集的資料有:一段時間內,每日的 x1 因素、x2因素和銷量 y_。採集的資料儘量多。在本例中用銷量預測產量,最優的產量應該等於銷量。由於目前沒有資料集,所以擬造了一套資料集。利用 Tensorflow 中函式隨機生成 x1、 x2,製造標準答案y_= x1 + x2,為了更真實,求和後還加了正負 0.05 的隨機噪聲。 我們把這套自制的資料集喂入神經網路,構建一個一層的神經網路,擬合預測酸奶日銷量的函式。
示例程式碼:
#coding:utf-8
#預測多或預測少的影響一樣
#0匯入模組,生成資料集
import tensorflow as tf
import numpy as np
BATCH_SIZE = 8
SEED = 23455
rdm = np.random.RandomState(SEED)
X = rdm.rand(32,2)
Y_ = [[x1+x2+(rdm.rand()/10.0-0.05)] for (x1, x2) in X]
#1定義神經網路的輸入、引數和輸出,定義前向傳播過程。
x = tf.placeholder(tf.float32, shape=(None, 2))
y_ = tf.placeholder(tf.float32, shape=(None, 1))
w1= tf.Variable(tf.random_normal([2, 1], stddev=1, seed=1))
y = tf.matmul(x, w1)
#2定義損失函式及反向傳播方法。
#定義損失函式為MSE,反向傳播方法為梯度下降。
loss_mse = tf.reduce_mean(tf.square(y_ - y))
train_step = tf.train.GradientDescentOptimizer(0.001).minimize(loss_mse)
#train_step = tf.train.MomentumOptimizer(0.001,0.9).minimize(loss_mse)
#train_step = tf.train.AdamOptimizer(0.001).minimize(loss_mse)
#3生成會話,訓練STEPS輪
with tf.Session() as sess:
init_op = tf.global_variables_initializer()
sess.run(init_op)
STEPS = 20000
for i in range(STEPS):
start = (i*BATCH_SIZE) % 32
end = (i*BATCH_SIZE) % 32 + BATCH_SIZE
sess.run(train_step, feed_dict={x: X[start:end], y_: Y_[start:end]})
if i % 500 == 0:
print "After %d training steps, w1 is: " % (i)
print sess.run(w1), "\n"
print "Final w1 is: \n", sess.run(w1)
#在本程式碼#2中嘗試其他反向傳播方法,看對收斂速度的影響
執行結果如下:

由上述程式碼可知,本例中神經網路預測模型為y = w1*x1 +w2*x2,損失函式採用均方誤差。通過使損失函式值(loss)不斷降低,神經網路模型得到最終引數w1=0.98,w2=1.02,銷量預測結果為y =0.98*x1 +1.02*x2。由於在生成資料集時,標準答案為y = x1+ x2,因此,銷量預測結果和標準答案已非常接近,說明該神經網路預測酸奶日銷量正確。
自定義損失函式:根據問題的實際情況,定製合理的損失函式。
例如:
對於預測酸奶日銷量問題,如果預測銷量大於實際銷量則會損失成本;如果預測銷量小於實際銷量則會損失利潤。在實際生活中,往往製造一盒酸奶的成本和銷售一盒酸奶的利潤是不等價的。因此,需要使用符合該問題的自定義損失函式。
自定義損失函式為:

其中,損失定義成分段函式:

損失函式表示,若預測結果 y 小於標準答案 y_,損失函式為利潤乘以預測結果y 與標準答案 y_之差;若預測結果 y大於標準答案 y_,損失函式為成本乘以預測結果 y 與標準答案 y_之差。
用 Tensorflow 函式表示為:
loss =tf.reduce_sum(tf.where(tf.greater(y,y_),COST(y-y_),PROFIT(y_-y)))
① 若酸奶成本為1元,酸奶銷售利潤為9元,則製造成本小於酸奶利潤,因此希望預測的結果y多一些。採用上述的自定義損失函式,訓練神經網路模型。
示例程式碼:
#coding:utf-8
#酸奶成本1元, 酸奶利潤9元
#預測少了損失大,故不要預測少,故生成的模型會多預測一些
#0匯入模組,生成資料集
import tensorflow as tf
import numpy as np
BATCH_SIZE = 8
SEED = 23455
COST = 1
PROFIT = 9
rdm = np.random.RandomState(SEED)
X = rdm.rand(32,2)
Y = [[x1+x2+(rdm.rand()/10.0-0.05)] for (x1, x2) in X]
#1定義神經網路的輸入、引數和輸出,定義前向傳播過程。
x = tf.placeholder(tf.float32, shape=(None, 2))
y_ = tf.placeholder(tf.float32, shape=(None, 1))
w1= tf.Variable(tf.random_normal([2, 1], stddev=1, seed=1))
y = tf.matmul(x, w1)
#2定義損失函式及反向傳播方法。
# 定義損失函式使得預測少了的損失大,於是模型應該偏向多的方向預測。
loss = tf.reduce_sum(tf.where(tf.greater(y, y_), (y - y_)*COST, (y_ - y)*PROFIT))
train_step = tf.train.GradientDescentOptimizer(0.001).minimize(loss)
#3生成會話,訓練STEPS輪。
with tf.Session() as sess:
init_op = tf.global_variables_initializer()
sess.run(init_op)
STEPS = 3000
for i in range(STEPS):
start = (i*BATCH_SIZE) % 32
end = (i*BATCH_SIZE) % 32 + BATCH_SIZE
sess.run(train_step, feed_dict={x: X[start:end], y_: Y[start:end]})
if i % 500 == 0:
print "After %d training steps, w1 is: " % (i)
print sess.run(w1), "\n"
print "Final w1 is: \n", sess.run(w1)
執行結果如下:

由程式碼執行結果可知,神經網路最終引數為 w1=1.03, w2=1.05,銷量預測結果為 y =1.03*x1 + 1.05*x2。由此可見,採用自定義損失函式預測的結果大於採用均方誤差預測的結果,更符合實際需求。
②若酸奶成本為 9元,酸奶銷售利潤為 1 元,則製造成本大於酸奶利潤,因此希望預測結果 y 小一些。採用上述的自定義損失函式,訓練神經網路模型。
示例程式碼:
#coding:utf-8
#酸奶成本9元, 酸奶利潤1元
#預測多了損失大,故不要預測多,故生成的模型會少預測一些
#0匯入模組,生成資料集
import tensorflow as tf
import numpy as np
BATCH_SIZE = 8
SEED = 23455
COST = 9
PROFIT = 1
rdm = np.random.RandomState(SEED)
X = rdm.rand(32,2)
Y = [[x1+x2+(rdm.rand()/10.0-0.05)] for (x1, x2) in X]
#1定義神經網路的輸入、引數和輸出,定義前向傳播過程。
x = tf.placeholder(tf.float32, shape=(None, 2))
y_ = tf.placeholder(tf.float32, shape=(None, 1))
w1= tf.Variable(tf.random_normal([2, 1], stddev=1, seed=1))
y = tf.matmul(x, w1)
#2定義損失函式及反向傳播方法。
#重新定義損失函式,使得預測多了的損失大,於是模型應該偏向少的方向預測。
loss = tf.reduce_sum(tf.where(tf.greater(y, y_), (y - y_)*COST, (y_ - y)*PROFIT))
train_step = tf.train.GradientDescentOptimizer(0.001).minimize(loss)
#3生成會話,訓練STEPS輪。
with tf.Session() as sess:
init_op = tf.global_variables_initializer()
sess.run(init_op)
STEPS = 3000
for i in range(STEPS):
start = (i*BATCH_SIZE) % 32
end = (i*BATCH_SIZE) % 32 + BATCH_SIZE
sess.run(train_step, feed_dict={x: X[start:end], y_: Y[start:end]})
if i % 500 == 0:
print "After %d training steps, w1 is: " % (i)
print sess.run(w1), "\n"
print "Final w1 is: \n", sess.run(w1)
執行結果如下:

由執行結果可知,神經網路最終引數為w1=0.96,w2=0.97,銷量預測結果為y =0.96*x1 + 0.97*x2。因此,採用自定義損失函式預測的結果小於採用均方誤差預測的結果,更符合實際需求。
交叉熵(Cross Entropy):表示兩個概率分佈之間的距離。交叉熵越大,兩個概率分佈距離越遠,兩個概率分佈越相異;交叉熵越小,兩個概率分佈距離越近,兩個概率分佈越相似。
交叉熵計算公式:
用Tensorflow函式表示為ce= -tf.reduce_mean(y_* tf.log(tf.clip_by_value(y,1e-12, 1.0)))
例如: 兩個神經網路模型解決二分類問題中,已知標準答案為 y_ = (1, 0),第一個神經網路模型預測結果為 y1=(0.6,0.4),第二個神經網路模型預測結果為 y2=(0.8, 0.2),判斷哪個神經網路模型預測的結果更接近標準答案。根據交叉熵的計算公式得:
H1((1,0),(0.6,0.4)) = -(1*log0.6 + 0*log0.4) ≈ -(-0.222 + 0) = 0.222
H2((1,0),(0.8,0.2)) = -(1*log0.8 + 0*log0.2) ≈ -(-0.097 + 0) = 0.097
由於 0.222>0.097,所以預測結果 y2 與標準答案 y_更接近,y2預測更準確。
softmax 函式:將 n 分類的 n 個輸出(y1,y2…yn)變為滿足以下概率分佈要求的函式。

softmax函式表示為:

softmax 函式應用:在 n 分類中,模型會有 n 個輸出,即 y1,y2…yn,其中yi 表示第 i 種情況出現的可能性大小。將 n 個輸出經過 softmax 函式,可得到符合概率分佈的分類結果。
在 Tensorflow 中,一般讓模型的輸出經過 sofemax 函式,以獲得輸出分類的概率分佈,再與標準答案對比,求出交叉熵,得到損失函式,用如下函式實現:
ce = tf.nn.sparse_softmax_cross_entropy_with_logits(logits=y, labels=tf.argmax(y_,1))
cem = tf.reduce_mean(ce) 4.2 學習率
學習率 learning_rate:表示了每次引數更新的幅度大小。學習率過大,會導致待優化的引數在最
小值附近波動,不收斂;學習率過小,會導致待優化的引數收斂緩慢。 在訓練過程中,引數的更新向著損失函式梯度下降的方向。引數的更新公式為:

假設損失函式為loss = (w + 1)2。梯度是損失函式loss的導數為 ∇=2w+2。如引數初值為5,學習率為0.2,則引數和損失函式更新如下:
1次 引數w:5 5 - 0.2 * (2 * 5 +2) = 2.6
2次 引數w:2.6 2.6 - 0.2 * (2 *2.6 + 2) = 1.16
3次 引數w:1.16 1.16 – 0.2 * (2 *1.16 + 2) = 0.296
4次 引數w:0.296 損失函式loss = (w + 1)2的影象為:
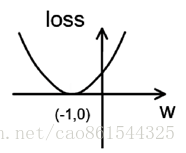
由圖可知,損失函式loss的最小值會在(-1,0)處得到,此時損失函式的導數為0,得到最終引數w =-1。
示例程式碼:
#coding:utf-8
#設損失函式 loss=(w+1)^2, 令w初值是常數5。反向傳播就是求最優w,即求最小loss對應的w值
import tensorflow as tf
#定義待優化引數w初值賦5
w = tf.Variable(tf.constant(5, dtype=tf.float32))
#定義損失函式loss
loss = tf.square(w+1)
#定義反向傳播方法
train_step = tf.train.GradientDescentOptimizer(0.2).minimize(loss)
#生成會話,訓練40輪
with tf.Session() as sess:
init_op=tf.global_variables_initializer()
sess.run(init_op)
for i in range(40):
sess.run(train_step)
w_val = sess.run(w)
loss_val = sess.run(loss)
print "After %s steps: w is %f, loss is %f." % (i, w_val,loss_val)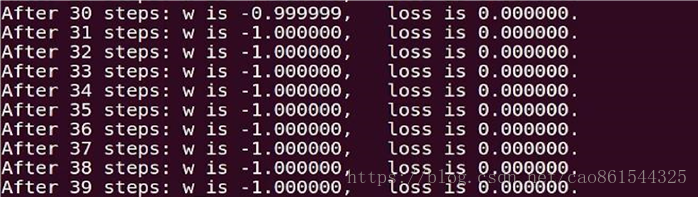
由結果可知,隨著損失函式值的減小,w無限趨近於-1,模型計算推測出最優引數w = -1。
學習率的設定學習率過大,會導致待優化的引數在最小值附近波動,不收斂;學習率過小,會導致待優化的引數收斂緩慢。
例如:
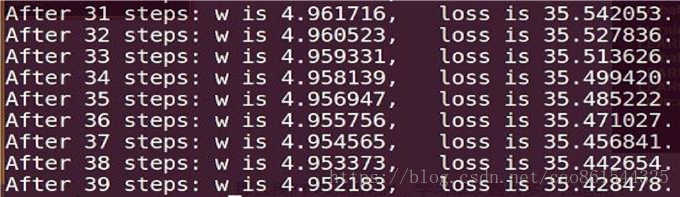
① 對於上例的損失函式loss= (w + 1)2。則將上述程式碼中學習率修改為 1,其餘內容不變。
實驗結果如下:

由執行結果可知,損失函式 loss 值並沒有收斂,而是在 5 和-7 之間波動。
②對於上例的損失函式loss = (w + 1)2。則將上述程式碼中學習率修改為0.0001,其餘內容不變。
實驗結果如下:
由執行結果可知,損失函式 loss 值緩慢下降,w值也在小幅度變化,收斂緩慢。
指數衰減學習率:學習率隨著訓練輪數變化而動態更新學習率計算公式如下:
Learning_rate=LEARNING_RATE_BASE*LEARNING_RATE_DECAY*

用 Tensorflow 的函式表示為:
global_step = tf.Variable(0,trainable=False)
learning_rate = tf.train.exponential_decay(
LEARNING_RATE_BASE,
global_step,
LEARNING_RATE_STEP,LEARNING_RATE_DECAY, staircase=True/False)其中,LEARNING_RATE_BASE為學習率初始值,LEARNING_RATE_DECAY為學習率衰減率,global_step記錄了當前訓練輪數,為不可訓練型引數。學習率 learning_rate更新頻率為輸入資料集總樣本數除以每次喂入樣本數。若staircase設定為True時,表示global_step/learning rate step取整數,學習率階梯型衰減;若staircase設定為false時,學習率會是一條平滑下降的曲線。 例如: 在本例中,模型訓練過程不設定固定的學習率,使用指數衰減學習率進行訓練。其中,學習率初值設置為0.1,學習率衰減率設定為0.99,BATCH_SIZE設定為1。
示例程式碼:
#coding:utf-8
#設損失函式 loss=(w+1)^2, 令w初值是常數10。反向傳播就是求最優w,即求最小loss對應的w值
#使用指數衰減的學習率,在迭代初期得到較高的下降速度,可以在較小的訓練輪數下取得更有收斂度。
import tensorflow as tf
LEARNING_RATE_BASE = 0.1 #最初學習率
LEARNING_RATE_DECAY = 0.99 #學習率衰減率
LEARNING_RATE_STEP = 1 #喂入多少輪BATCH_SIZE後,更新一次學習率,一般設為:總樣本數/BATCH_SIZE
#運行了幾輪BATCH_SIZE的計數器,初值給0, 設為不被訓練
global_step = tf.Variable(0, trainable=False)
#定義指數下降學習率
learning_rate = tf.train.exponential_decay(LEARNING_RATE_BASE, global_step, LEARNING_RATE_STEP, LEARNING_RATE_DECAY, staircase=True)
#定義待優化引數,初值給10
w = tf.Variable(tf.constant(5, dtype=tf.float32))
#定義損失函式loss
loss = tf.square(w+1)
#定義反向傳播方法
train_step = tf.train.GradientDescentOptimizer(learning_rate).minimize(loss, global_step=global_step)
#生成會話,訓練40輪
with tf.Session() as sess:
init_op=tf.global_variables_initializer()
sess.run(init_op)
for i in range(40):
sess.run(train_step)
learning_rate_val = sess.run(learning_rate)
global_step_val = sess.run(global_step)
w_val = sess.run(w)
loss_val = sess.run(loss)
print "After %s steps: global_step is %f, w is %f, learning rate is %f, loss is %f" % (i, global_step_val, w_val, learning_rate_val, loss_val)執行結果如下:
由結果可以看出,隨著訓練輪數增加學習率在不斷減小。
4.3 滑動平均
滑動平均:記錄了一段時間內模型中所有引數w和b各自的平均值。利用滑動平均值可以增強模型的泛化能力。
滑動平均值(影子)計算公式:
影子 = 衰減率 * 影子 +(1 - 衰減率)* 引數
其中,衰減率,影子初值=引數初值
用Tesnsorflow函式表示為:
ema =tf.train.ExponentialMovingAverage(MOVING_AVERAGE_DECAY,global_step)
其中,MOVING_AVERAGE_DECAY表示滑動平均衰減率,一般會賦接近1的值,global_step表示當前訓練了多少輪。
ema_op =ema.apply(tf.trainable_variables())
其中,ema.apply()函式實現對括號內參數求滑動平均,tf.trainable_variables()函式實現把所有待訓練引數彙總為列表。
with tf.control_dependencies([train_step,ema_op]):
train_op = tf.no_op(name='train')其中,該函式實現將滑動平均和訓練過程同步執行。
檢視模型中引數的平均值,可以用ema.average()函式。 例如:
在神經網路模型中,將MOVING_AVERAGE_DECAY設定為0.99,引數w1設定為0,w1的滑動平均值設定為0。
①開始時,輪數global_step設定為0,引數w1更新為1,則w1的滑動平均值為:
w1滑動平均值=min(0.99,1/10)*0+(1–min(0.99,1/10)*1 = 0.9
②當輪數global_step設定為100時,引數w1更新為10,則滑動平均值變為:
w1滑動平均值=min(0.99,101/110)*0.9+(1–min(0.99,101/110)*10 = 0.826+0.818=1.644
③再次執行,引數w1更新為1.644,則滑動平均值變為:
w1滑動平均值=min(0.99,101/110)*1.644+(1–min(0.99,101/110)*10 = 2.328
④再次執行,引數w1更新為2.328,則滑動平均值:
w1滑動平均值=2.956
示例程式碼:
#coding:utf-8
import tensorflow as tf
#1. 定義變數及滑動平均類
#定義一個32位浮點變數,初始值為0.0 這個程式碼就是不斷更新w1引數,優化w1引數,滑動平均做了個w1的影子
w1 = tf.Variable(0, dtype=tf.float32)
#定義num_updates(NN的迭代輪數),初始值為0,不可被優化(訓練),這個引數不訓練
global_step = tf.Variable(0, trainable=False)
#例項化滑動平均類,給衰減率為0.99,當前輪數global_step
MOVING_AVERAGE_DECAY = 0.99
ema = tf.train.ExponentialMovingAverage(MOVING_AVERAGE_DECAY, global_step)
#ema.apply後的括號裡是更新列表,每次執行sess.run(ema_op)時,對更新列表中的元素求滑動平均值。
#在實際應用中會使用tf.trainable_variables()自動將所有待訓練的引數彙總為列表
#ema_op = ema.apply([w1])
ema_op = ema.apply(tf.trainable_variables())
#2. 檢視不同迭代中變數取值的變化。
with tf.Session() as sess:
# 初始化
init_op = tf.global_variables_initializer()
sess.run(init_op)
#用ema.average(w1)獲取w1滑動平均值 (要執行多個節點,作為列表中的元素列出,寫在sess.run中)
#打印出當前引數w1和w1滑動平均值
print "current global_step:", sess.run(global_step)
print "current w1", sess.run([w1, ema.average(w1)])
# 引數w1的值賦為1
sess.run(tf.assign(w1, 1))
sess.run(ema_op)
print "current global_step:", sess.run(global_step)
print "current w1", sess.run([w1, ema.average(w1)])
# 更新global_step和w1的值,模擬出輪數為100時,引數w1變為10, 以下程式碼global_step保持為100,每次執行滑動平均操作,影子值會更新
sess.run(tf.assign(global_step, 100))
sess.run(tf.assign(w1, 10))
sess.run(ema_op)
print "current global_step:", sess.run(global_step)
print "current w1:", sess.run([w1, ema.average(w1)])
# 每次sess.run會更新一次w1的滑動平均值
sess.run(ema_op)
print "current global_step:" , sess.run(global_step)
print "current w1:", sess.run([w1, ema.average(w1)])
sess.run(ema_op)
print "current global_step:" , sess.run(global_step)
print "current w1:", sess.run([w1, ema.average(w1)])
sess.run(ema_op)
print "current global_step:" , sess.run(global_step)
print "current w1:", sess.run([w1, ema.average(w1)])
sess.run(ema_op)
print "current global_step:" , sess.run(global_step)
print "current w1:", sess.run([w1, ema.average(w1)])
sess.run(ema_op)
print "current global_step:" , sess.run(global_step)
print "current w1:", sess.run([w1, ema.average(w1)])
sess.run(ema_op)
print "current global_step:" , sess.run(global_step)
print "current w1:", sess.run([w1, ema.average(w1)])
#更改MOVING_AVERAGE_DECAY 為 0.1 看影子追隨速度
執行結果如下:

從執行結果可知,最初引數w1和滑動平均值都是0;引數w1設定為1後,滑動平均值變為0.9;當迭代輪數更新為100輪時,引數w1更新為10後,滑動平均值變為1.644。隨後每執行一次,引數 w1的滑動平均值都向引數w1靠近。可見,滑動平均追隨引數的變化而變化。
4.4 正則化
過擬合:神經網路模型在訓練資料集上的準確率較高,在新的資料進行預測或分類時準確率較低,說明模型的泛化能力差。
正則化:在損失函式中給每個引數w加上權重,引入模型複雜度指標,從而抑制模型噪聲,減小過擬合。
使用正則化後,損失函式loss變為兩項之和:
loss = loss(y與y_)+ REGULARIZER*loss(w)
其中,第一項是預測結果與標準答案之間的差距,如之前講過的交叉熵、均方誤差等;第二項是正則化計算結果。
正則化計算方法:
① L1正則化: 
用Tesnsorflow函式表示:loss(w)= tf.contrib.layers.l1_regularizer(REGULARIZER)(w)
② L2正則化: 
用Tesnsorflow函式表示:loss(w)= tf.contrib.layers.l2_regularizer(REGULARIZER)(w)
用Tesnsorflow函式實現正則化:
tf.add_to_collection('losses',tf.contrib.layers.l2_regularizer(regularizer)(w) loss = cem +tf.add_n(tf.get_collection('losses'))
cem的計算已在4.1節中給出。
例如:
用300個符合正態分佈的點X[x0, x1]作為資料集,根據點X[x0, x1]計算生成標註Y_,將資料集標註為紅色點和藍色點。
標註規則為:當x02 + x12 < 2 時,y_=1,標註為紅色;當x02 + x12
我們分別用無正則化和有正則化兩種方法,擬合曲線,把紅色點和藍色點分開。在實際分類時,如果前向傳播輸出的預測值y接近1則為紅色點概率越大,接近0則為藍色點概率越大,輸出的預測值y為0.5是紅藍點概率分界線。
在本例子中,我們使用了之前未用過的模組與函式:
matplotlib模組:Python中的視覺化工具模組,實現函式視覺化
終端安裝指令:
sudo apt install python-tk
sudo pip install matplotlib
函式plt.scatter():利用指定顏色實現點(x,y)的視覺化
plt.scatter (x座標, y座標, c=”顏色”)
plt.show()
收集規定區域內所有的網格座標點:
xx, yy = np.mgrid[起:止:步長, 起:止:步長] #找到規定區域以步長為解析度的行列網格座標點
grid = np.c_[xx.ravel(), yy.ravel()] #收集規定區域內所有的網格座標點
plt.contour()函式:告知x、y座標和各點高度,用levels指定高度的點描上顏色
plt.contour (x軸座標值, y軸座標值, 該點的高度,levels=[等高線的高度]) plt.show()
示例程式碼如:
#coding:utf-8
#0匯入模組 ,生成模擬資料集
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
BATCH_SIZE = 30
seed = 2
#基於seed產生隨機數
rdm = np.random.RandomState(seed)
#隨機數返回300行2列的矩陣,表示300組座標點(x0,x1)作為輸入資料集
X = rdm.randn(300,2)
#從X這個300行2列的矩陣中取出一行,判斷如果兩個座標的平方和小於2,給Y賦值1,其餘賦值0
#作為輸入資料集的標籤(正確答案)
Y_ = [int(x0*x0 + x1*x1 <2) for (x0,x1) in X]
#遍歷Y中的每個元素,1賦值'red'其餘賦值'blue',這樣視覺化顯示時人可以直觀區分
Y_c = [['red' if y else 'blue'] for y in Y_]
#對資料集X和標籤Y進行shape整理,第一個元素為-1表示,隨第二個引數計算得到,第二個元素表示多少列,把X整理為n行2列,把Y整理為n行1列
X = np.vstack(X).reshape(-1,2)
Y_ = np.vstack(Y_).reshape(-1,1)
print X
print Y_
print Y_c
#用plt.scatter畫出資料集X各行中第0列元素和第1列元素的點即各行的(x0,x1),用各行Y_c對應的值表示顏色(c是color的縮寫)
plt.scatter(X[:,0], X[:,1], c=np.squeeze(Y_c))
plt.show()
#定義神經網路的輸入、引數和輸出,定義前向傳播過程
def get_weight(shape, regularizer):
w = tf.Variable(tf.random_normal(shape), dtype=tf.float32)
tf.add_to_collection('losses', tf.contrib.layers.l2_regularizer(regularizer)(w))
return w
def get_bias(shape):
b = tf.Variable(tf.constant(0.01, shape=shape))
return b
x = tf.placeholder(tf.float32, shape=(None, 2))
y_ = tf.placeholder(tf.float32, shape=(None, 1))
w1 = get_weight([2,11], 0.01)
b1 = get_bias([11])
y1 = tf.nn.relu(tf.matmul(x, w1)+b1)
w2 = get_weight([11,1], 0.01)
b2 = get_bias([1])
y = tf.matmul(y1, w2)+b2
#定義損失函式
loss_mse = tf.reduce_mean(tf.square(y-y_))
loss_total = loss_mse + tf.add_n(tf.get_collection('losses'))
#定義反向傳播方法:不含正則化
train_step = tf.train.AdamOptimizer(0.0001).minimize(loss_mse)
with tf.Session() as sess:
init_op = tf.global_variables_initializer()
sess.run(init_op)
STEPS = 40000
for i in range(STEPS):
start = (i*BATCH_SIZE) % 300
end = start + BATCH_SIZE
sess.run(train_step, feed_dict={x:X[start:end], y_:Y_[start:end]})
if i % 2000 == 0:
loss_mse_v = sess.run(loss_mse, feed_dict={x:X, y_:Y_})
print("After %d steps, loss is: %f" %(i, loss_mse_v))
#xx在-3到3之間以步長為0.01,yy在-3到3之間以步長0.01,生成二維網格座標點
xx, yy = np.mgrid[-3:3:.01, -3:3:.01]
#將xx , yy拉直,併合併成一個2列的矩陣,得到一個網格座標點的集合
grid = np.c_[xx.ravel(), yy.ravel()]
#將網格座標點喂入神經網路 ,probs為輸出
probs = sess.run(y, feed_dict={x:grid})
#probs的shape調整成xx的樣子
probs = probs.reshape(xx.shape)
print "w1:\n",sess.run(w1)
print "b1:\n",sess.run(b1)
print "w2:\n",sess.run(w2)
print "b2:\n",sess.run(b2)
plt.scatter(X[:,0], X[:,1], c=np.squeeze(Y_c))
plt.contour(xx, yy, probs, levels=[.5])
plt.show()
#定義反向傳播方法:包含正則化
train_step = tf.train.AdamOptimizer(0.0001).minimize(loss_total)
with tf.Session() as sess:
init_op = tf.global_variables_initializer()
sess.run(init_op)
STEPS = 40000
for i in range(STEPS):
start = (i*BATCH_SIZE) % 300
end = start + BATCH_SIZE
sess.run(train_step, feed_dict={x: X[start:end], y_:Y_[start:end]})
if i % 2000 == 0:
loss_v = sess.run(loss_total, feed_dict={x:X,y_:Y_})
print("After %d steps, loss is: %f" %(i, loss_v))
xx, yy = np.mgrid[-3:3:.01, -3:3:.01]
grid = np.c_[xx.ravel(), yy.ravel()]
probs = sess.run(y, feed_dict={x:grid})
probs = probs.reshape(xx.shape)
print "w1:\n",sess.run(w1)
print "b1:\n",sess.run(b1)
print "w2:\n",sess.run(w2)
print "b2:\n",sess.run(b2)
plt.scatter(X[:,0], X[:,1], c=np.squeeze(Y_c))
plt.contour(xx, yy, probs, levels=[.5])
plt.show()執行程式碼,效果如下:
首先,資料集實現視覺化,x02 + x12 < 2的點顯示紅色, x02 + x12

接著,執行無正則化的訓練過程,把紅色的點和藍色的點分開,生成曲線如下圖所示:

最後,執行有正則化的訓練過程,把紅色的點和藍色的點分開,生成曲線如下圖所示:

對比無正則化與有正則化模型的訓練結果,可看出有正則化模型的擬合曲線平滑,模型具有更好的泛化能力。
4.5 神經網路搭建八股
前向傳播:由輸入到輸出,搭建完整的網路結構描述前向傳播的過程需要定義三個函式:
def forward(x, regularizer):
w=
b=
y=
return y
第一個函式 forward()完成網路結構的設計,從輸入到輸出搭建完整的網路結構,實現前向傳播過程。該函式中,引數x為輸入,regularizer為正則化權重,返回值為預測或分類結果y。
def get_weight(shape, regularizer):
w = tf.Variable()
tf.add_to_collection('losses',tf.contrib.layers.l2_regularizer(regularizer)(w))
return w第二個函式get_weight()對引數w設定。該函式中,引數shape表示引數w的形狀,regularizer 表示正則化權重,返回值為引數w。其中,tf.variable()給w賦初值,tf.add_to_collection()表示將引數w正則化損失加到總損失losses中。
defget_bias(shape):
b =tf.Variable( )
return b
第三個函式get_bias()對引數b進行設定。該函式中,引數shape表示引數b的形狀,返回值為引數b。其中,tf.variable()表示給w賦初值。
反向傳播:訓練網路,優化網路引數,提高模型準確性。
def backward( ):
x= tf.placeholder( )
y_ = tf.placeholder( )
y =forward.forward(x, REGULARIZER)
global_step = tf.Variable(0,trainable=False)
loss =
函式 backward()中,placeholder()實現對資料集x和標準答案y_佔位,forward.forward()實現前向傳播的網路結構,引數global_step表示訓練輪數,設定為不可訓練型引數。在訓練網路模型時,常將正則化、指數衰減學習率和滑動平均這三個方法作為模型優化方法。
在Tensorflow中,正則化表示為:首先,計算預測結果與標準答案的損失值
①MSE: y 與 y_的差距(loss_mse) =tf.reduce_mean(tf.square(y-y_))
②交叉熵:ce = tf.nn.sparse_softmax_cross_entropy_with_logits(logits=y,labels=tf.argmax(y_, 1))
y與 y_的差距(cem) = tf.reduce_mean(ce)
③自定義:y 與 y_的差距
其次,總損失值為預測結果與標準答案的損失值加上正則化項
loss = y 與 y_的差距 +tf.add_n(tf.get_collection('losses'))
在Tensorflow中,指數衰減學習率表示為:
learning_rate= tf.train.exponential_decay(LEARNING_RATE_BASE, global_step,
資料集總樣本數 / BATCH_SIZE,
LEARNING_RATE_DECAY,staircase=True)
train_step=tf.train.GradientDescentOptimizer(learning_rate).minimize(loss,global_step=global_step)在Tensorflow中,滑動平均表示為:
ema=tf.train.ExponentialMovingAverage(MOVING_AVERAGE_DECAY, global_step)
ema_op =ema.apply(tf.trainable_variables())
with tf.control_dependencies([train_step, ema_op]):
train_op = tf.no_op(name='train')其中,滑動平均和指數衰減學習率中的global_step為同一個引數。
用with結構初始化所有引數
with tf.Session() as sess:
init_op =tf.global_variables_initializer()
sess.run(init_op) for i inrange(STEPS):
sess.run(train_step, feed_dict={x: , y_: })
if i % 輪數 == 0:
print其中,with結構用於初始化所有引數資訊以及實現呼叫訓練過程,並打印出loss值。
判斷python執行檔案是否為主檔案
if __name__=='__main__':
backward()
該部分用來判斷python執行的檔案是否為主檔案。若是主檔案,則執行backword()函式。 例如: 用300個符合正態分佈的點X[x0, x1]作為資料集,根據點X[x0, x1]的不同進行標註Y_,將資料集標註為紅色和藍色。標註規則為:當x02 + x12 < 2 時,y_=1,點X標註為紅色;當x02 + x12
程式碼總共分為三個模組:生成資料集(generateds.py)、前向傳播(forward.py)、反向傳播(backward.py)。
①生成資料集的模組(generateds.py)
#coding:utf-8
#0匯入模組 ,生成模擬資料集
import numpy as np
import matplotlib.pyplot as plt
seed = 2
def generateds():
#基於seed產生隨機數
rdm = np.random.RandomState(seed)
#隨機數返回300行2列的矩陣,表示300組座標點(x0,x1)作為輸入資料集
X = rdm.randn(300,2)
#從X這個300行2列的矩陣中取出一行,判斷如果兩個座標的平方和小於2,給Y賦值1,其餘賦值0
#作為輸入資料集的標籤(正確答案)
Y_ = [int(x0*x0 + x1*x1 <2) for (x0,x1) in X]
#遍歷Y中的每個元素,1賦值'red'其餘賦值'blue',這樣視覺化顯示時人可以直觀區分
Y_c = [['red' if y else 'blue'] for y in Y_]
#對資料集X和標籤Y進行形狀整理,第一個元素為-1表示跟隨第二列計算,第二個元素表示多少列,可見X為兩列,Y為1列
X = np.vstack(X).reshape(-1,2)
Y_ = np.vstack(Y_).reshape(-1,1)
return X, Y_, Y_c
#print X
#print Y_
#print Y_c
#用plt.scatter畫出資料集X各行中第0列元素和第1列元素的點即各行的(x0,x1),用各行Y_c對應的值表示顏色(c是color的縮寫)
#plt.scatter(X[:,0], X[:,1], c=np.squeeze(Y_c))
#plt.show()②前向傳播模組(forward.py)
#coding:utf-8
#0匯入模組 ,生成模擬資料集
import tensorflow as tf
#定義神經網路的輸入、引數和輸出,定義前向傳播過程
def get_weight(shape, regularizer):
w = tf.Variable(tf.random_normal(shape), dtype=tf.float32)
tf.add_to_collection('losses', tf.contrib.layers.l2_regularizer(regularizer)(w))
return w
def get_bias(shape):
b = tf.Variable(tf.constant(0.01, shape=shape))
return b
def forward(x, regularizer):
w1 = get_weight([2,11], regularizer)
b1 = get_bias([11])
y1 = tf.nn.relu(tf.matmul(x, w1) + b1)
w2 = get_weight([11,1], regularizer)
b2 = get_bias([1])
y = tf.matmul(y1, w2) + b2
return y③反向傳播模組(backward.py)
#coding:utf-8
#0匯入模組 ,生成模擬資料集
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import opt4_8_generateds
import opt4_8_forward
STEPS = 40000
BATCH_SIZE = 30
LEARNING_RATE_BASE = 0.001
LEARNING_RATE_DECAY = 0.999
REGULARIZER = 0.01
def backward():
x = tf.placeholder(tf.float32, shape=(None, 2))
y_ = tf.placeholder(tf.float32, shape=(None, 1))
X, Y_, Y_c = opt4_8_generateds.generateds()
y = opt4_8_forward.forward(x, REGULARIZER)
global_step = tf.Variable(0,trainable=False)
learning_rate = tf.train.exponential_decay(
LEARNING_RATE_BASE,
global_step,
300/BATCH_SIZE,
LEARNING_RATE_DECAY,
staircase=True)
#定義損失函式
loss_mse = tf.reduce_mean(tf.square(y-y_))
loss_total = loss_mse + tf.add_n(tf.get_collection('losses'))
#定義反向傳播方法:包含正則化
train_step = tf.train.AdamOptimizer(learning_rate).minimize(loss_total)
with tf.Session() as sess:
init_op = tf.global_variables_initializer()
sess.run(init_op)
for i in range(STEPS):
start = (i*BATCH_SIZE) % 300
end = start + BATCH_SIZE
sess.run(train_step, feed_dict={x: X[start:end], y_:Y_[start:end]})
if i % 2000 == 0:
loss_v = sess.run(loss_total, feed_dict={x:X,y_:Y_})
print("After %d steps, loss is: %f" %(i, loss_v))
xx, yy = np.mgrid[-3:3:.01, -3:3:.01]
grid = np.c_[xx.ravel(), yy.ravel()]
probs = sess.run(y, feed_dict={x:grid})
probs = probs.reshape(xx.shape)
plt.scatter(X[:,0], X[:,1], c=np.squeeze(Y_c))
plt.contour(xx, yy, probs, levels=[.5])
plt.show()
if __name__=='__main__':
backward()執行結果如下:

由執行結果可見,程式使用模組化設計方法,加入指數衰減學習率,使用正則化後,紅色點和藍色點的分割曲線相對平滑,效果變好。
致謝
感謝曹老師的辛勤付出,來源曹健,人工智慧實踐:TensorFlow筆記,北京大學