
前景提取--PBAS演算法
關於前景提取演算法PBAS的粗淺理解
- 演算法的效能不錯,在2012年發表
- 基於畫素,相對容易理解
- 引數自適應,無論是背景,閾值,還是學習率
- 利用與Vibe演算法相似的更新演算法
- 不僅獨立地用到三個顏色通道的畫素值,還用到梯度值
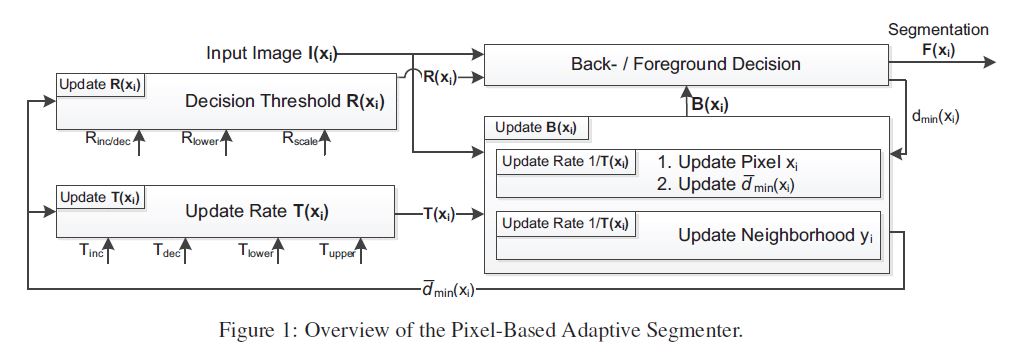
- 1. 影象輸入
I(xi) -
a.
I(xi) ={Iv(xi) ,Im(xi) }; - b.
Iv(xi) 為輸入的畫素值 - c.
Im(xi) 輸入的梯度值
- 2. 背景模型
B(xi) -
a.
Bk(xi) ={Bvk(xi) ,Bmk(xi) },同輸入I(xi) 一致 - b.
Bvk(xi) 為背景的畫素值 - c.
Bmk(xi) 為背景的梯度值 - d.
B(xi)={B1(xi),B2(xi),B3(xi),...,BN(xi)} , N=35 - e. 當
F(xi)=0 時,即認為當前輸入I(xi) 為背景畫素。B(xi) 以1T(xi) 的概率更新自己,同時以1T(xi) 的概率更新其周邊B(yi) - f. 更新自己時,先從{1,2,…,N}中隨機選擇出一個k,再用對應的輸入
I(xi) 代替Bk(xi) . - g. 更新周邊
B(yi) 時,無論F(yi) =0還是F(yi) =1,只要F(xi)=0 ,則同樣先從{1,2,…,N}中隨機選擇出一個k,再用對應的輸入I(xi) 代替Bk(yi) .
- 3. 距離公式
-
a.
dist(I(xi),Bk(xi ))=αIm¯¯¯¯⋅|Iv(xi)−Bvk(xi)|+|Im(xi)−Bmk(xi)| - b.
Im¯¯¯¯¯ 為最後觀察到的視訊幀的梯度平均值 - c.
α 相關推薦
前景提取--PBAS演算法
關於前景提取演算法PBAS的粗淺理解 演算法的效能不錯,在2012年發表 基於畫素,相對容易理解 引數自適應,無論是背景,閾值,還是學習率 利用與Vibe演算法相似的更新演算法 不僅獨立地用到三
光條中心線提取-Steger演算法(基於Hessian矩陣)
採用結構光進行掃描檢測時,需要提取鐳射條紋的中心線,本文采用經典的Steger演算法提取光條中心。 Steger演算法原理 Steger演算法基於Hessian矩陣,能夠實現光條中心亞畫素精度定位:首先通過Hessian矩陣能夠得到光條的法線方向,然後在法線
[轉]影象邊緣提取-Canny演算法
[轉自http://blog.csdn.net/likezhaobin/article/details/6892176] 圖象的邊緣是指圖象區域性區域亮度變化顯著的部分,該區域的灰度剖面一般可以看作是一個階躍,既從一個灰度值在很小的緩衝區域內急劇變化到另一個灰度相差較大的灰
人臉識別特徵臉提取PCA演算法
#include "opencv2/core/core.hpp" #include "opencv2/highgui/highgui.hpp" #include "opencv2/contrib/contrib.hpp" #include <iostream> #include <fst
前景提取(1)基於幀差的背景減除法
最近接觸移動偵測專案,其對應的原理主要是背景建模,而背景建模方法眾多,常見的如幀差法、背景減除法、codebook、Vibe、GMM等。 前景提取的步驟如下: #include "opencv2/opencv.hpp" using namespace
視訊前景提取綜述
由於前景背景差異小、運動形變,背景裡有快速明暗變化,背景中存在幾何變化以及光照等噪聲,諸多因素對前景提取效果和質量造成了一定的影響,甚至無法有效地提取到完整前景幀序列。完整的提取前景,也就是不多提取也不少提取,已經成為研究熱點和難點。常用的運動前景檢測和提取方法
opencv3.10中4種視訊前景提取
#include <iostream> #include <string> #include "opencv2/core.hpp" #include "opencv2/core/utility.hpp" #include "opencv2/cuda
前景提取、去除背景(selectROI+Grabcut)
前幾天看到別人數學建模題目是前景提取,想到很早之前試過的grabcut,所以來放個demo,2333 慣例先放效果 //必須是三通道圖片 兩個函式: 1.selectROI 【需要配置Opencv的contribute模組】、、主要作用是獲取矩形框,可自行寫其他
python 基於TF-IDF演算法的關鍵詞提取
import jiaba.analyse jieba.analyse.extract_tags(content, topK=20, withWeight=False, allowPOS=()) content:為輸入的文字 topK:為返回tf-itf權重最大的關鍵詞,預設值為20個詞 wit
關於視訊關鍵幀提取演算法
系統總體設計 監控系統的移動端部署 影象關鍵內容的提取 資料傳輸加密 監控端與使用者 身份認證身份認證 實時預警實時預警 獲取監控關鍵資訊獲取監控關鍵資訊 異常行為檢測過程通常分為四個階段: 初始化-通過初始化為整個系統處
特徵提取與檢測(二) --- SIFT演算法
SIFT(Scale-invariant feature transform)是一種檢測區域性特徵的演算法,該演算法通過求一幅圖中的特徵點(interest points,or corner points)及其有關scale 和 orien
關鍵詞提取演算法—TF/IDF演算法
關鍵詞提取演算法一般可分為有監督學習和無監督學習兩類。 有監督的關鍵詞提取方法可以通過分類的方式進行,通過構建一個較為完善的詞表,然後判斷每個文件與詞表中的每個詞的匹配程度,以類似打標籤的方式,達到關鍵詞提取的效果。優點是可以獲得較高的精度,缺點是需要大批量的標註資料,並且要對詞表進行人
文字關鍵詞提取演算法
分享一下我老師大神的人工智慧教程!零基礎,通俗易懂!http://blog.csdn.net/jiangjunshow 也歡迎大家轉載本篇文章。分享知識,造福人民,實現我們中華民族偉大復興!
HanLP 關鍵詞提取演算法分析詳解
參考論文:《TextRank: Bringing Order into Texts》 TextRank演算法提取關鍵詞的Java實現 TextRank演算法自動摘要的Java實現這篇文章中作者大概解釋了一下TextRank公式 1. 論文 In thi
特徵提取演算法提取二進位制後面的特徵資料,使用Java流實現
幫別人解決一個問題:在搞圖片特徵相似度檢索的東西,特徵提取演算法提取出來的二進位制特徵資料,想要讀取二進位制檔案的每一行固定位之後的資料有啥好的辦法沒? 首先讀取二進位制檔案,考慮到使用位元組流,但是不能解決如何判斷換行的問題,綜上,本人是先使用BufferedReader流讀取一行的資料,
影象主題色提取演算法
1. 顏色量化演算法 彩色影象一般採用RGB色彩模式,每個畫素由RGB三個顏色分量組成。隨著硬體的不斷升級,彩色影象的儲存由最初的8位、16位變成現在的24位、32真彩色。所謂全綵是指每個畫素由8位($2^8$=0~255)表示,紅綠藍三原色組合共有1677萬($256*256*256$)萬種顏色,如果將R
Python的jieba分詞及TF-IDF和TextRank 演算法提取關鍵字
參考文章:Github上的專案———jieba 中文分詞 對於NLP(自然語言處理)來說,分詞是一步重要的工作,市面上也有各種分詞庫,11款開放中文分詞系統比較。 1.基於詞典:基於字典、詞庫匹配的分詞方法;(字串匹配、機械分詞法) 2.基於統計:基於詞頻度統計的分詞方法;&n
關鍵詞提取/關鍵字提取之TF-IDF演算法
TF-IDF(term frequency–inverse document frequency)是一種用於資訊檢索與資訊探勘的常用加權技術。TF的意思是詞頻(Term - frequency), IDF的意思是逆向檔案頻率(inverse Document frequency)。TF-IDF是一
如何做好文字關鍵詞提取?從三種演算法說起
在自然語言處理領域,處理海量的文字檔案最關鍵的是要把使用者最關心的問題提取出來。而無論是對於長文字還是短文字,往往可以通過幾個關鍵詞窺探整個文字的主題思想。與此同時,不管是基於文字的推薦還是基於文字的搜尋,對於文字關鍵詞的依賴也很大,關鍵詞提取的準確程度直接關係到推薦系統或者搜尋系統的最終
【編譯原理】提取左部公因子演算法
下面是書中給出的演算法, 簡單的描述了兩句。但是實際上實現起來沒有那麼簡單。 在百度搜索提取左部公因演算法時也只有理論上的知識,並沒有實際的演算法。 https://github.com/hixiaosan/dragon_algorithm.git