
最短路徑演算法—Dijkstra演算法和BellmanFord演算法
阿新 • • 發佈:2019-01-10
鬆弛操作
Dijkstra演算法和BellmanFord演算法都是基於這個簡單的操作。
下面我們來了解這個簡單而重要的操作:
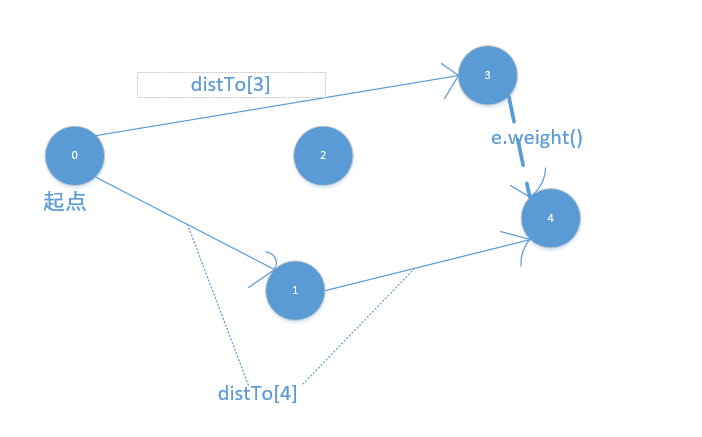
- 線鬆弛
線鬆弛也就是處理
起點到邊的兩個頂點距離與兩個頂點直接距離的問題。
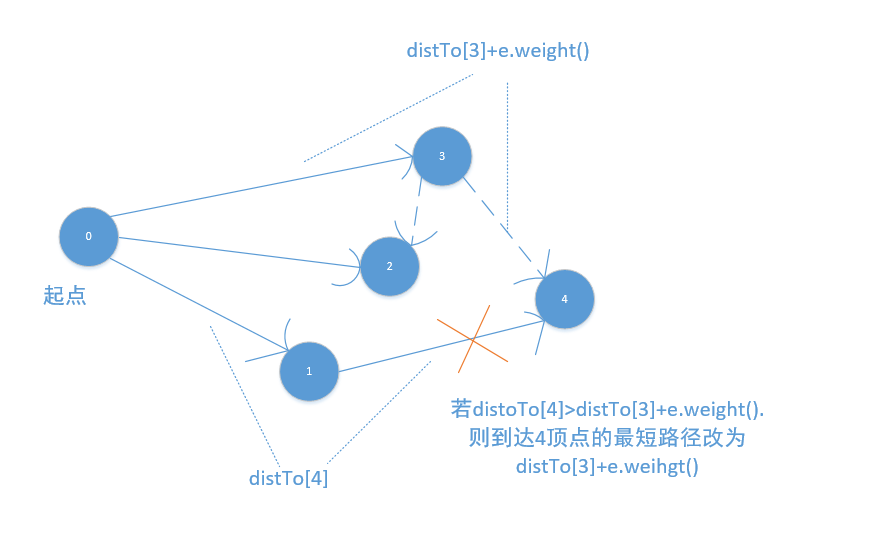
如:假如distTo[4]>distTo[3]+e.weight(),則會修改到達4頂點的最短路徑,否則不變。
2.點鬆弛
點鬆弛其實就是對頂點的每一條發出的邊都進行一次線鬆弛操作。
如圖:邊3->2,同樣要進行線鬆弛。
Dijkstra演算法
直接附上程式碼了(有詳細解釋)
效能:任何情況下都能保證較好的效能(當然,此演算法不能存在負值的邊)
package Bellman—Ford 演算法
這裡討論的是基於佇列的BellmanFord演算法的實現。
此演算法適用於任何情況(當然,存在負權值環對於求最短路徑是沒有意義的。)
package ShortestPath;
import java.util.ArrayDeque;
import java.util.LinkedList;
import java.util.Queue;
import java.util.Stack;
import minSpanningTree.Edge;
/**
*基於佇列的Bellman-Ford演算法: 將起點的distTo[s]初始為0,將其他所有頂點distTo初始為無窮大,任意順序放鬆所有邊,重複V輪。
*<p>思路:與Dijkstra演算法類似,double陣列distTo意義一樣;
*佇列queue儲存放鬆的頂點;不同的是增加一個標記標記重複每輪放鬆的頂點和下一輪放鬆的頂點(使得佇列不會重複儲存頂點),下輪在放鬆函式裡設定為true,以便保證下輪不重複;
*Bellman—Ford演算法對於一般加權值圖,其中就包括了負值權值(但是假若存在負權值的環,則對於求最短路徑則沒有意義了)
*<p>1>首先明白為什麼存在負權值換對於求最短路徑沒有意義?因為在環裡每重複一次,我們都能得到一條更短的路徑。
*<p>2>加入存在負權值環,relax過程會有什麼異常呢?由上一個問題答案,我們知道,這個過程假如和Dijstra演算法無異,則會無限迴圈下去
*<p>3>如何確定存在負權值環呢?我們前面已經知道,重複V輪,我們就能得到最短路徑,
*事實上我們只需要V-1輪結束後,就能得到最短路徑,所以,假如重複了V輪,是不是就說明存在負權值環了呢
*
* @author 羅正
* @date 2016年9月23日 下午3:40:23
**/
public class BellmanFordSP {
private double[] distTo;
private boolean[] onQ;
private DirectedEdge[] edgeTo;
private Queue<Integer> queue;
//對於檢測負權值環定義的變數
private int count;
private Iterable<DirectedEdge> cycle;
/**
* 此函式和Dijkstra演算法的函式並無太大區別,只是增加了onQ[],標記頂點。
* @param g
* @param s
*/
public BellmanFordSP(EdgeDigraph g,int s)
{
distTo = new double[g.V()];
onQ = new boolean[g.V()];
int count = 0;
queue = new ArrayDeque<>();
edgeTo = new DirectedEdge[g.V()];
for(int i = 0;i<g.V();i++)
distTo[i] = Double.POSITIVE_INFINITY;
distTo[s] = 0.0;
onQ[s] = true;
queue.add(s);
while(!queue.isEmpty())
{
int v = queue.remove();
onQ[v] = false;
relax(g,v);
}
}
/*放鬆操作*/
private void relax(EdgeDigraph g,int v)
{
for(DirectedEdge e : g.adj(v))
{
int w = e.to();
if(distTo[w] > distTo[v]+e.weight())
{
distTo[w] = distTo[v]+e.weight();
edgeTo[w] = e;
if(!onQ[w])
{
queue.add(w);
onQ[w] = true;
}
}
//假如存在環,則count == V
if(count++ % g.V() == 0)
findNegativeCycle();
}
}
public double distto(int v)
{
return distTo[v];
}
public boolean hasPath(int v)
{
return distTo[v]<Double.POSITIVE_INFINITY;
}
public Iterable<DirectedEdge> path(int v)
{
if(!hasPath(v))
return null;
else
{
Stack<DirectedEdge> pathTo = new Stack<>();
for(DirectedEdge e = edgeTo[v];e != null; e = edgeTo[e.from()])
pathTo.push(e);
return pathTo;
}
}
//檢測環函式,並儲存環
private void findNegativeCycle()
{
int V = edgeTo.length;
EdgeDigraph g;
g = new EdgeDigraph(V);
for(int v = 0;v<V;v++)
{
if(edgeTo[v] != null)
g.addEdge(edgeTo[v]);
}
EdgeWeightedDirectedCycle c = new EdgeWeightedDirectedCycle(g);
cycle = c.cycle();
}
public boolean hasNegativeCycle()
{
return cycle == null;
}
public Iterable<DirectedEdge> negativeCycle()
{
return cycle;
}
}