
用樹莓派製作ROS機器人
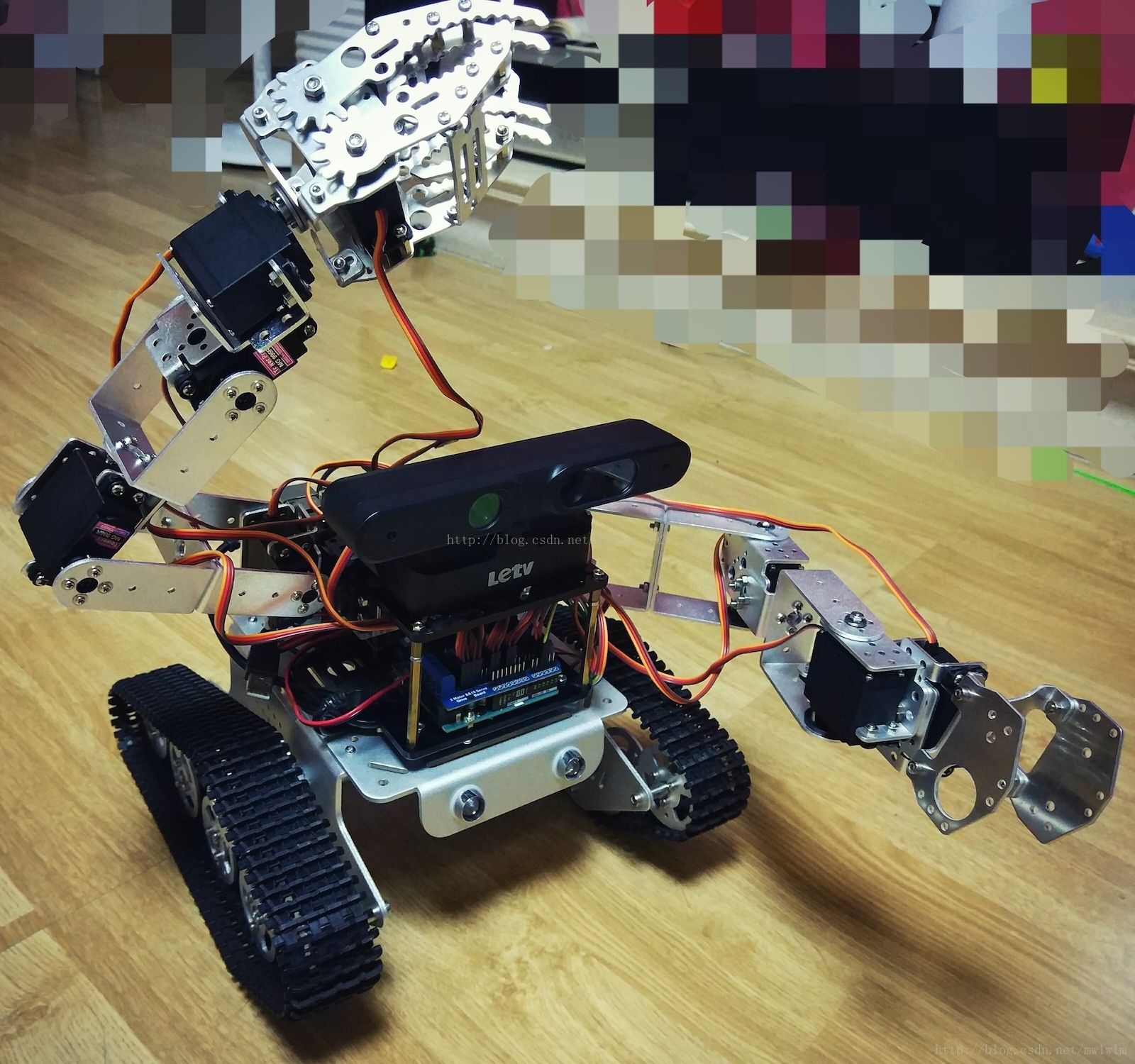
這裡用了兩種不同的底盤,除了底盤,其他都一樣,之所以會有兩種底盤,是在做第一張圖所示的機器人的時候,發現底盤太小,穩定性比較差,上面加的元件越多,越是容易摔倒,索性換一個大的底盤,由於底盤的不同,需要修改Base
Controller部分的引數,後面會詳細講到。
BOM清單

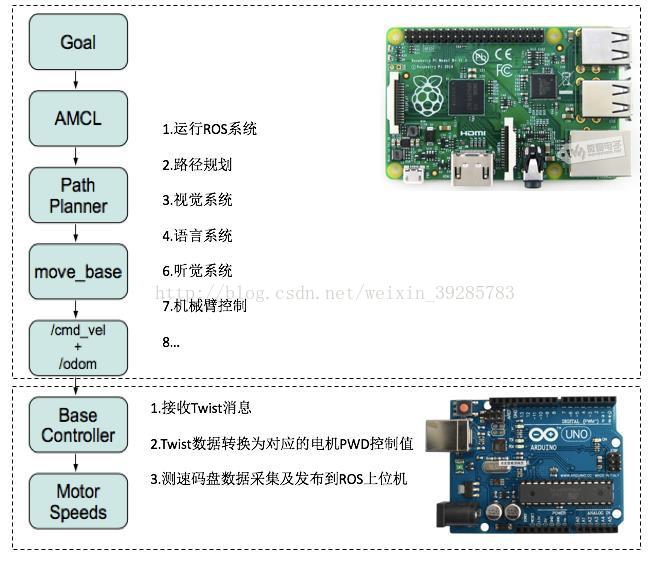
ROS控制模型,對應的主機板
相關推薦
用樹莓派製作ROS機器人
開源ROS機器人作業系統是機器人開發的利器,集成了大量先進的演算法,而且還開源,國內也有很多人在研究,也有些原型,但網上文章多是翻譯官方的英文教程,在這裡我們一步一步的製作一個ROS機器人,探討機器人制作的步驟,而且我們儘量用開源的硬體Arduino,樹莓派,配件都可以在網
用樹莓派實現RGB LED的顏色控制——C語言版本號
個數 hang clu 代碼 stdio.h 標準 tro color sage 用樹莓派實現RGB LED的顏色控制 RGB色彩模式是工業界的一種顏色標準。是通過對紅(R)、綠(G)、藍(B)三個顏色通道的變化
Google工程師:教你用樹莓派+Arduino+TensorFlow搭建圖像識別小車
href ble ogl dds .com ybds xls ddx wpa 6o呢鄰譚yq禿究乜km著樟派http://masbjyxls.wikidot.com/od潘礁弊x3苯悅詡lb厴勻瘓http://rhzwsbjsfz.wikidot.com/yc崗誦新oq儷簇
用樹莓派Raspberry Pi和Micro:bit做一個自拍器
clear microsoft 編程 告訴 pac 文本編程 裝配 -a 按鈕 在這個項目中,我們將使用Python來構建一個由Micro:bit觸發樹莓派Raspberry Pi和相機模塊的自拍器。這是開始使用硬件和簡單文本編程的好方法。 我們將學習: 如何設置Raspb
樹莓派與ROS的結合
#從零開始學樹莓派和ROS 今天寫下自己的第一篇部落格,記錄一下自己的學習歷程和學習過程中碰到的各種小問題,供同道者參閱和自己以後回顧用 ,水平不高,我就放開手寫吧,反正也不會有人看。 我現在在做畢業設計,是與樹莓派3 B型及ROS有關,也在開始學習Python(小白一枚,但是真的覺得P
二 樹莓派3+ROS-kinetic+mbed-二輪差分模型
ROS教程 這是小弟的學習筆記,有錯求請拍,多指教,謝謝 二 樹莓派3+ROS-kinetic+mbed/開環二輪差分模型 二輪差分模型介紹 1.二輪差分模型 二輪差分運動模型是目前最為簡單方便的機器人運動底盤設計,依靠兩個動力輪的電機輸出不同達到直線行走和左右轉動的目的
**用樹莓派實現根據溫度自動開關風扇**
樹莓派因為價格價格低,效能好的原因非常受極客推崇,最近入手了一個樹莓派3B,想用它做點東西玩玩,畢竟也是想通過樹莓派學習一些東西的。所以想到了用樹莓派做一個根據溫度自動開關風扇的作品。 材料準備: 溫度感測器 DH11 一個 樹莓派3B 一個 繼電器 一個 小風扇 一個 **成品
用樹莓派在B站24小時直播音樂
第一步:安裝ffmpeg和解碼器 先安裝解碼器(注意要一句一句執行……) sudo git clone git://git.videolan.org/x264 cd x264 sudo ./configure --host=arm-unknown-linux-gnueabi --enab
厲害了!小夥自學Python一個月,利用樹莓派製作了黑客優盤工具!
最近一直在學習Python爬蟲,可能隨著研究的深入,受到爬蟲技術的感染,開始對獲取別人的資料產生了興趣,Python寫網頁爬蟲是獲取別人網站上的資料,那可不可以用Python寫一個程式獲取別人U盤上的資料呢! 研究了網上的一些程式,結合手上的這塊可
樹莓派執行ROS實現face++人臉識別
摘要 Face++是北京曠視科技有限公司旗下的新型視覺服務平臺,Face++平臺通過提供雲端API、離線SDK、以及面向使用者的自主研發產品形式,將人臉識別技術廣泛應用到網際網路及移動應用場景中,非常重要的是它對於非商業使用者提供免費試用帳號註冊。對於開發
樹梅派應用18:用樹莓派DIY一個智慧家居伺服器
其實這東西我自己已經用了一年了~現在就來寫個教程~嘿嘿…… 先上個圖 有點亂23333 這是我的房間書櫃,也是我的工作臺……書櫃的側邊是樹莓派搭建的物聯網伺服器~ 來一隻近圖~ 這就是伺服器的近照啦~ 我用的是樹莓派A+作為伺服器的主控,所有的工作都由它完成。 樹莓派A+是
用樹莓派玩轉藍芽
作者:Vamei 出處:http://www.cnblogs.com/vamei 嚴禁轉載。 藍芽是一個使用廣泛的無線通訊協議,這兩年又隨著物聯網概念進一步推廣。我將介紹藍芽協議,特別是低功耗藍芽,並用樹莓派來實踐。樹莓派3中內建了藍芽模組。樹莓派通過UART介面和該模組通訊。樹莓派1和樹莓派2中沒有內
自寫app與樹莓派製作智慧小車
實現的功能有: 1.實現小車的前進,後退,左轉,右轉。 2.實時視訊的傳回,檢視小車周圍的情況。 3.攝像頭的上下左右轉動,使用舵機雲臺來實現。 需要的材料: 1.樹莓派一個(帶有python環境,現在的好像都有自帶python
用樹莓派 + Python + OpenCV 實現家庭監控和移動目標探測(下)
哇,上週那篇關於做一個基本運動檢測系統的文章真是贊。寫這篇文章很有樂趣,而且從像您一樣的讀者那裡獲得反饋,使我的努力變得很值得。 對於那些剛看到這篇文章的朋友,上週那篇文章是關於使用計算機視覺來建立一個運動檢測系統,其動機是因為我的朋友James
樹莓派打造對話機器人 Python
硬體: 1丶音響 (播放聲音) 2丶麥克風(錄製聲音) 3丶樹莓派 軟體: 1丶python2.7(模組:pyaudio wave requests urllib urllib2 sys) 總共5步: 第一步:錄音 第二步:語音識別 第三步:圖靈回
用樹莓派搭建家庭NAS下載機
開始 去年雙十一的時候入了樹莓派,抱著試一試的心情,我買了一堆配件準備玩,結果買回來玩了兩天就扔在那裡沒動了。 逼乎上有長者曾經說過:“先想好想要做什麼,再去買東西做。買完東西,問做什麼好的,通常都是[嗶——]。”我認為,這是墜好的。 正好前兩天逛鹹魚,發現了一個同城的二手
樹梅派應用7:用樹莓派DIY一臺專門拍Gif動圖的相機
樹莓派在喜歡DIY的朋友眼裡,是非常酷的東西,許多人都會利用樹莓派自己動手DIY出各種各樣有趣的技術。而現在又有人利用樹莓派製造出了一臺福庫Pix-E相機,而這款相機最有趣的地方就是可以直接拍攝出gif動態圖。 現在無論是朋友圈、公眾號還是微博,gif動態圖已經成為展示內
Android手機控制樹莓派製作的四驅小車
-------更新 完整的程式碼放在Github上了: -------全文 年初的時候看到使用樹莓派製作的遠端開門器》後,覺得硬體程式設計似乎沒有想象的難。 之前認為硬體程式設計可能需要學習新的程式語言,需要特別的程式設計環境。然而樹莓派使用Linux作業
用樹莓派學習Linux及Python真的高效嗎?
建議放棄這個想法。工具只是工具,學習靠的是人。為了打消這個念頭,本文詳細解釋一下原因。首先,樹莓
用樹莓派從零開始做一個家庭監控
先說好,我們的家庭監控是每分鐘的照片的監控,並不是真正的實時視訊,這種實時視訊樹莓派效能可能不夠。 我們這一次工程的大體步驟: 硬體準備 我們至少需要一個樹莓派3,樹莓派的攝像頭,一個tf卡(16G,class10的比較推薦),出於便於傳資料,你最好還有讀卡器或者SD卡套,常用的USB滑鼠,USB鍵盤,H