
Linux音訊驅動之ASoC架構中的Platform
1. Platform驅動在ASoC中的作用
前面幾章內容已經說過,ASoC被分為Machine,Platform和Codec三大部件,Platform驅動的主要作用是完成音訊資料的管理,最終通過CPU的數字音訊介面(DAI)把音訊資料傳送給Codec進行處理,最終由Codec輸出驅動耳機或者是喇叭的音信訊號。在具體實現上,ASoC有把Platform驅動分為兩個部分:snd_soc_platform_driver和snd_soc_dai_driver。其中,platform_driver負責管理音訊資料,把音訊資料通過dma或其他操作傳送至cpu dai中,dai_driver則主要完成cpu一側的dai的引數配置,同時也會通過一定的途徑把必要的dma等引數與snd_soc_platform_driver進行互動。
2. snd_soc_platform_driver的註冊
通常,ASoC把snd_soc_platform_driver註冊為一個系統的platform_driver,不要被這兩個相像的術語所迷惑,前者只是針對ASoC子系統的,後者是來自Linux的裝置驅動模型。我們要做的就是:
- 定義一個snd_soc_platform_driver結構的例項;
- 在platform_driver的probe回撥中利用ASoC的API:snd_soc_register_platform()註冊上面定義的例項;
- 實現snd_soc_platform_driver中的各個回撥函式;
-
staticstruct snd_soc_platform_driver samsung_asoc_platform = {
- .ops = &dma_ops,
- .pcm_new = dma_new,
- .pcm_free = dma_free_dma_buffers,
- };
- staticint __devinit samsung_asoc_platform_probe(struct platform_device *pdev)
- {
-
return snd_soc_register_platform(&pdev->dev, &samsung_asoc_platform);
- }
- staticint __devexit samsung_asoc_platform_remove(struct platform_device *pdev)
- {
- snd_soc_unregister_platform(&pdev->dev);
- return 0;
- }
- staticstruct platform_driver asoc_dma_driver = {
- .driver = {
- .name = "samsung-audio",
- .owner = THIS_MODULE,
- },
- .probe = samsung_asoc_platform_probe,
- .remove = __devexit_p(samsung_asoc_platform_remove),
- };
- module_platform_driver(asoc_dma_driver);
- 為snd_soc_platform例項申請記憶體;
- 從platform_device中獲得它的名字,用於Machine驅動的匹配工作;
- 初始化snd_soc_platform的欄位;
- 把snd_soc_platform例項連線到全域性連結串列platform_list中;
- 呼叫snd_soc_instantiate_cards,觸發音效卡的machine、platform、codec、dai等的匹配工作;
3. cpu的snd_soc_dai driver驅動的註冊
dai驅動通常對應cpu的一個或幾個I2S/PCM介面,與snd_soc_platform一樣,dai驅動也是實現為一個platform driver,實現一個dai驅動大致可以分為以下幾個步驟:- 定義一個snd_soc_dai_driver結構的例項;
- 在對應的platform_driver中的probe回撥中通過API:snd_soc_register_dai或者snd_soc_register_dais,註冊snd_soc_dai例項;
- 實現snd_soc_dai_driver結構中的probe、suspend等回撥;
- 實現snd_soc_dai_driver結構中的snd_soc_dai_ops欄位中的回撥函式;
snd_soc_dai 該結構在snd_soc_register_dai函式中通過動態記憶體申請獲得, 簡要介紹一下幾個重要欄位:
- driver 指向關聯的snd_soc_dai_driver結構,由註冊時通過引數傳入;
- playback_dma_data 用於儲存該dai播放stream的dma資訊,例如dma的目標地址,dma傳送單元大小和通道號等;
- capture_dma_data 同上,用於錄音stream;
- platform 指向關聯的snd_soc_platform結構;
snd_soc_dai_driver 該結構需要自己根據不同的soc晶片進行定義,關鍵欄位介紹如下:
- probe、remove 回撥函式,分別在音效卡載入和解除安裝時被呼叫;
- suspend、resume 電源管理回撥函式;
- ops 指向snd_soc_dai_ops結構,用於配置和控制該dai;
- playback snd_soc_pcm_stream結構,用於指出該dai支援的聲道數,位元速率,資料格式等能力;
- capture snd_soc_pcm_stream結構,用於指出該dai支援的聲道數,位元速率,資料格式等能力;
4. snd_soc_dai_driver中的ops欄位
ops欄位指向一個snd_soc_dai_ops結構,該結構實際上是一組回撥函式的集合,dai的配置和控制幾乎都是通過這些回撥函式來實現的,這些回撥函式基本可以分為3大類,驅動程式可以根據實際情況實現其中的一部分:
工作時鐘配置函式 通常由machine驅動呼叫:
- set_sysclk 設定dai的主時鐘;
- set_pll 設定PLL引數;
- set_clkdiv 設定分頻係數;
- dai的格式配置函式 通常由machine驅動呼叫:
- set_fmt 設定dai的格式;
- set_tdm_slot 如果dai支援時分複用,用於設定時分複用的slot;
- set_channel_map 聲道的時分複用對映設定;
- set_tristate 設定dai引腳的狀態,當與其他dai並聯使用同一引腳時需要使用該回調;
標準的snd_soc_ops回撥 通常由soc-core在進行PCM操作時呼叫:
- startup
- shutdown
- hw_params
- hw_free
- prepare
- trigger
抗pop,pop聲 由soc-core呼叫:
- digital_mute
以下這些api通常被machine驅動使用,machine驅動在他的snd_pcm_ops欄位中的hw_params回撥中使用這些api:
- snd_soc_dai_set_fmt() 實際上會呼叫snd_soc_dai_ops或者codec driver中的set_fmt回撥;
- snd_soc_dai_set_pll() 實際上會呼叫snd_soc_dai_ops或者codec driver中的set_pll回撥;
- snd_soc_dai_set_sysclk() 實際上會呼叫snd_soc_dai_ops或者codec driver中的set_sysclk回撥;
- snd_soc_dai_set_clkdiv() 實際上會呼叫snd_soc_dai_ops或者codec driver中的set_clkdiv回撥;
snd_soc_dai_set_fmt(struct snd_soc_dai *dai, unsigned int fmt)的第二個引數fmt在這裡特別說一下,ASoC目前只是用了它的低16位,並且為它專門定義了一些巨集來方便我們使用:
bit 0-3 用於設定介面的格式:
- #define SND_SOC_DAIFMT_I2S 1 /* I2S mode */
- #define SND_SOC_DAIFMT_RIGHT_J 2 /* Right Justified mode */
- #define SND_SOC_DAIFMT_LEFT_J 3 /* Left Justified mode */
- #define SND_SOC_DAIFMT_DSP_A 4 /* L data MSB after FRM LRC */
- #define SND_SOC_DAIFMT_DSP_B 5 /* L data MSB during FRM LRC */
- #define SND_SOC_DAIFMT_AC97 6 /* AC97 */
- #define SND_SOC_DAIFMT_PDM 7 /* Pulse density modulation */
bit 4-7 用於設定介面時鐘的開關特性:
- #define SND_SOC_DAIFMT_CONT (1 << 4) /* continuous clock */
- #define SND_SOC_DAIFMT_GATED (2 << 4) /* clock is gated */
bit 8-11 用於設定介面時鐘的相位:
- #define SND_SOC_DAIFMT_NB_NF (1 << 8) /* normal bit clock + frame */
- #define SND_SOC_DAIFMT_NB_IF (2 << 8) /* normal BCLK + inv FRM */
- #define SND_SOC_DAIFMT_IB_NF (3 << 8) /* invert BCLK + nor FRM */
- #define SND_SOC_DAIFMT_IB_IF (4 << 8) /* invert BCLK + FRM */
bit 12-15 用於設定介面主從格式:
- #define SND_SOC_DAIFMT_CBM_CFM (1 << 12) /* codec clk & FRM master */
- #define SND_SOC_DAIFMT_CBS_CFM (2 << 12) /* codec clk slave & FRM master */
- #define SND_SOC_DAIFMT_CBM_CFS (3 << 12) /* codec clk master & frame slave */
- #define SND_SOC_DAIFMT_CBS_CFS (4 << 12) /* codec clk & FRM slave */
5. snd_soc_platform_driver中的ops欄位
該ops欄位是一個snd_pcm_ops結構,實現該結構中的各個回撥函式是soc platform驅動的主要工作,他們基本都涉及dma操作以及dma buffer的管理等工作。下面介紹幾個重要的回撥函式:
ops.open
當應用程式開啟一個pcm裝置時,該函式會被呼叫,通常,該函式會使用snd_soc_set_runtime_hwparams()設定substream中的snd_pcm_runtime結構裡面的hw_params相關欄位,然後為snd_pcm_runtime的private_data欄位申請一個私有結構,用於儲存該平臺的dma引數。
ops.hw_params
驅動的hw_params階段,該函式會被呼叫。通常,該函式會通過snd_soc_dai_get_dma_data函式獲得對應的dai的dma引數,獲得的引數一般都會儲存在snd_pcm_runtime結構的private_data欄位。然後通過snd_pcm_set_runtime_buffer函式設定snd_pcm_runtime結構中的dma buffer的地址和大小等引數。要注意的是,該回調可能會被多次呼叫,具體實現時要小心處理多次申請資源的問題。
ops.prepare
正式開始資料傳送之前會呼叫該函式,該函式通常會完成dma操作的必要準備工作。
ops.trigger
資料傳送的開始,暫停,恢復和停止時,該函式會被呼叫。
ops.pointer
該函式返回傳送資料的當前位置。
6. 音訊資料的dma操作
soc-platform驅動的最主要功能就是要完成音訊資料的傳送,大多數情況下,音訊資料都是通過dma來完成的。
6.1. 申請dma buffer
因為dma的特殊性,dma buffer是一塊特殊的記憶體,比如有的平臺規定只有某段地址範圍的記憶體才可以進行dma操作,而多數嵌入式平臺還要求dma記憶體的實體地址是連續的,以方便dma控制器對記憶體的訪問。在ASoC架構中,dma buffer的資訊儲存在snd_pcm_substream結構的snd_dma_buffer *buf欄位中,它的定義如下
- struct snd_dma_buffer {
- struct snd_dma_device dev; /* device type */
- unsigned char *area; /* virtual pointer */
- dma_addr_t addr; /* physical address */
- size_t bytes; /* buffer size in bytes */
- void *private_data; /* private for allocator; don't touch */
- };
那麼,在哪裡完成了snd_dam_buffer結構的初始化賦值操作呢?答案就在snd_soc_platform_driver的pcm_new回撥函式中,還是以/sound/soc/samsung/dma.c為例:
- staticstruct snd_soc_platform_driver samsung_asoc_platform = {
- .ops = &dma_ops,
- .pcm_new = dma_new,
- .pcm_free = dma_free_dma_buffers,
- };
- staticint __devinit samsung_asoc_platform_probe(struct platform_device *pdev)
- {
- return snd_soc_register_platform(&pdev->dev, &samsung_asoc_platform);
- }
pcm_new欄位指向了dma_new函式,dma_new函式進一步為playback和capture分別呼叫preallocate_dma_buffer函式,我們看看preallocate_dma_buffer函式的實現:
- staticint preallocate_dma_buffer(struct snd_pcm *pcm, int stream)
- {
- struct snd_pcm_substream *substream = pcm->streams[stream].substream;
- struct snd_dma_buffer *buf = &substream->dma_buffer;
- size_t size = dma_hardware.buffer_bytes_max;
- pr_debug("Entered %s\n", __func__);
- buf->dev.type = SNDRV_DMA_TYPE_DEV;
- buf->dev.dev = pcm->card->dev;
- buf->private_data = NULL;
- buf->area = dma_alloc_writecombine(pcm->card->dev, size,
- &buf->addr, GFP_KERNEL);
- if (!buf->area)
- return -ENOMEM;
- buf->bytes = size;
- return 0;
- }
該函式先是獲得事先定義好的buffer大小,然後通過dma_alloc_weitecombine函式分配dma記憶體,然後完成substream->dma_buffer的初始化賦值工作。上述的pcm_new回撥會在音效卡的建立階段被呼叫,呼叫的詳細的過程請參考Linux ALSAs音效卡驅動之六:ASoC架構中的Machine中的圖3.1。
在音效卡的hw_params階段,snd_soc_platform_driver結構的ops->hw_params會被呼叫,在該回呼叫,通常會使用api:snd_pcm_set_runtime_buffer()把substream->dma_buffer的數值拷貝到substream->runtime的相關欄位中(.dma_area, .dma_addr, .dma_bytes),這樣以後就可以通過substream->runtime獲得這些地址和大小資訊了。
dma buffer獲得後,即是獲得了dma操作的源地址,那麼目的地址在哪裡?其實目的地址當然是在dai中,也就是前面介紹的snd_soc_dai結構的playback_dma_data和capture_dma_data欄位中,而這兩個欄位的值也是在hw_params階段,由snd_soc_dai_driver結構的ops->hw_params回撥,利用api:snd_soc_dai_set_dma_data進行設定的。緊隨其後,snd_soc_platform_driver結構的ops->hw_params回撥利用api:snd_soc_dai_get_dma_data獲得這些dai的dma資訊,其中就包括了dma的目的地址資訊。這些dma資訊通常還會被儲存在substream->runtime->private_data中,以便在substream的整個生命週期中可以隨時獲得這些資訊,從而完成對dma的配置和操作。
6.2 dma buffer管理
播放時,應用程式把音訊資料來源源不斷地寫入dma buffer中,然後相應platform的dma操作則不停地從該buffer中取出資料,經dai送往codec中。錄音時則正好相反,codec源源不斷地把A/D轉換好的音訊資料經過dai送入dma buffer中,而應用程式則不斷地從該buffer中讀走音訊資料。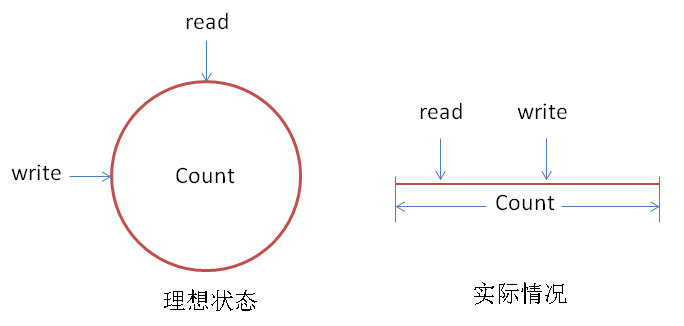
圖6.2.1 環形緩衝區 環形緩衝區正好適合用於這種情景的buffer管理,理想情況下,大小為Count的緩衝區具備一個讀指標和寫指標,我們期望他們都可以閉合地做環形移動,但是實際的情況確實:緩衝區通常都是一段連續的地址,他是有開始和結束兩個邊界,每次移動之前都必須進行一次判斷,當指標移動到末尾時就必須人為地讓他回到起始位置。在實際應用中,我們通常都會把這個大小為Count的緩衝區虛擬成一個大小為n*Count的邏輯緩衝區,相當於理想狀態下的圓形繞了n圈之後,然後把這段總的距離拉平為一段直線,每一圈對應直線中的一段,因為n比較大,所以大多數情況下不會出現讀寫指標的換位的情況(如果不對buffer進行擴充套件,指標到達末端後,回到起始端時,兩個指標的前後相對位置會發生互換)。擴充套件後的邏輯緩衝區在計算剩餘空間可條件判斷是相對方便。alsa driver也使用了該方法對dma buffer進行管理:
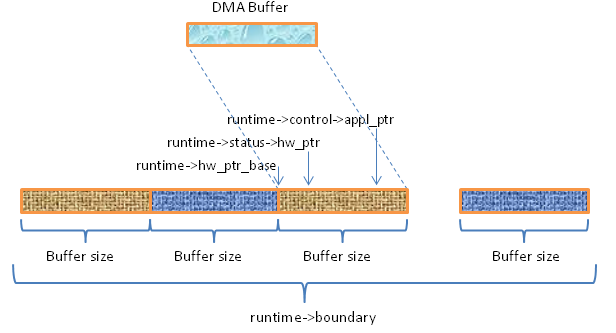
圖6.2.2 alsa driver緩衝區管理 snd_pcm_runtime結構中,使用了四個相關的欄位來完成這個邏輯緩衝區的管理:
- snd_pcm_runtime.hw_ptr_base 環形緩衝區每一圈的基地址,當讀寫指標越過一圈後,它按buffer size進行移動;
- snd_pcm_runtime.status->hw_ptr 硬體邏輯位置,播放時相當於讀指標,錄音時相當於寫指標;
- snd_pcm_runtime.control->appl_ptr 應用邏輯位置,播放時相當於寫指標,錄音時相當於讀指標;
- snd_pcm_runtime.boundary 擴充套件後的邏輯緩衝區大小,通常是(2^n)*size;
- static inline snd_pcm_uframes_t snd_pcm_playback_avail(struct snd_pcm_runtime *runtime)
- {
- snd_pcm_sframes_t avail = runtime->status->hw_ptr + runtime->buffer_size - runtime->control->appl_ptr;
- if (avail < 0)
- avail += runtime->boundary;
- elseif ((snd_pcm_uframes_t) avail >= runtime->boundary)
- avail -= runtime->boundary;
- return avail;
- }
要想對映到真正的緩衝區位置,只要減去runtime->hw_ptr_base即可。下面的api用於更新這幾個指標的當前位置:
- int snd_pcm_update_hw_ptr(struct snd_pcm_substream *substream)
- 應用程式呼叫alsa-lib的snd_pcm_writei、snd_pcm_writen函式;
- 應用程式使用ioctl:SNDRV_PCM_IOCTL_WRITEI_FRAMES或SNDRV_PCM_IOCTL_WRITEN_FRAMES;
- 應用程式使用alsa-lib的snd_pcm_mmap_begin/snd_pcm_mmap_commit;
- 更新dma的硬體的當前位置,該數值通常儲存在runtime->private_data中;
- 呼叫snd_pcm_period_elapsed函式,該函式會進一步呼叫snd_pcm_update_hw_ptr0函式更新上述所說的4個緩衝區管理欄位,然後喚醒相應的等待程序;
- <span style="font-family:Arial, Verdana, sans-serif;"><span style="white-space: normal;"></span></span><pre name="code"class="cpp">void snd_pcm_period_elapsed(struct snd_pcm_substream *substream)
- {
- struct snd_pcm_runtime *runtime;
- unsigned long flags;
- if (PCM_RUNTIME_CHECK(substream))
- return;
- runtime = substream->runtime;
- if (runtime->transfer_ack_begin)
- runtime->transfer_ack_begin(substream);
- snd_pcm_stream_lock_irqsave(substream, flags);
- if (!snd_pcm_running(substream) ||
- snd_pcm_update_hw_ptr0(substream, 1) < 0)
- goto _end;
- if (substream->timer_running)
- snd_timer_interrupt(substream->timer, 1);
- _end:
- snd_pcm_stream_unlock_irqrestore(substream, flags);
- if (runtime->transfer_ack_end)
- runtime->transfer_ack_end(substream);
-
相關推薦
Linux音訊驅動之ASoC架構中的Platform
1. Platform驅動在ASoC中的作用 前面幾章內容已經說過,ASoC被分為Machine,Platform和Codec三大部件,Platform驅動的主要作用是完成音訊資料的管理,最終通過CPU的數字音訊介面(DAI)把音訊資料傳送給Codec進行處理,最終由Codec輸出驅動耳機或者是喇叭的
Linux音訊驅動之ASoC驅動架構
1. ASoC的由來 ASoC--ALSA System on Chip ,是建立在標準ALSA驅動層上,為了更好地支援嵌入式處理器和移動裝置中的音訊Codec的一套軟體體系。在ASoc出現之前,核心對於SoC中的音訊已經有部分的支援,不過會有一些侷限性: Codec驅動與SoC CPU的底層
Linux ALSA音效卡驅動之八:ASoC架構中的Platform
1. Platform驅動在ASoC中的作用 前面幾章內容已經說過,ASoC被分為Machine,Platform和Codec三大部件,Platform驅動的主要作用是完成音訊資料的管理,最終通過CPU的數字音訊介面(DAI)把音訊資料傳送給Codec進行處理,最終由Co
Linux ALSA音效卡驅動之六:ASoC架構中的Machine
前面一節的內容我們提到,ASoC被分為Machine、Platform和Codec三大部分,其中的Machine驅動負責Platform和Codec之間的耦合以及部分和裝置或板子特定的程式碼,再次引用上一節的內容:Machine驅動負責處理機器特有的一些控制元件和音訊
Linux ALSA音效卡驅動之七:ASoC架構中的Codec
1. Codec簡介 在移動裝置中,Codec的作用可以歸結為4種,分別是: 對PCM等訊號進行D/A轉換,把數字的音訊訊號轉換為模擬訊號對Mic、Linein或者其他輸入源的模擬訊號進行A/D轉換,把模擬的聲音訊號轉變CPU能夠處理的數字訊號對音訊通路進行控制,比如
Linux ALSA框架之七:ASoC架構中的Codec
1. Codec簡介 在移動裝置中,Codec的作用可以歸結為4種,分別是: 對PCM等訊號進行D/A轉換,把數字的音訊訊號轉換為模擬訊號對Mic、Linein或者其他輸入源的模擬訊號進行A/D轉換,把模擬的聲音訊號轉變CPU能夠處理的數字訊號對音訊通路進行控制,比如播放音樂,收聽調頻收音機,又或者接聽電
Linux音訊驅動-ASOC之Machine
struct snd_soc_dai_link { /* config - must be set by machine driver */ const char *name; /* Codec name */ const char *stream_name; /* Stream name */
linux音訊子系統之alsa asoc層
ALSA SoC層概述 ALSA片上系統(ASoC)層的總體專案目標是為嵌入式片上系統處理器(例如pxa2xx,au1x00,iMX等)和行動式音訊編解碼器提供更好的ALSA支援。在ASoC子系統之前,核心對SoC音訊有一些支援,但它有一些限制: - 編解碼器驅動程式通常與底層SoC CPU緊密
Linux 裝置驅動開發 —— 裝置樹在platform裝置驅動中的使用
關與裝置樹的概念,我們在Exynos4412 核心移植(六)—— 裝置樹解析 裡面已經學習過,下面看一下裝置樹在裝置驅動開發中起到的作用 Device Tree是一種描述硬體的資料結構,裝置樹源(Device Tree Source)檔案
Linux音訊驅動-AOSC之Codec
概述 ASOC的出現是為了讓Codec獨立於CPU,減少和CPU之間的耦合,這樣同一個Codec驅動無需修改就可以適用任何一款平臺。還是以下圖做參考例子: 在Machine中已經知道,snd_soc_dai_link結構就指明瞭該Machine所使用的Platform和
linux驅動編寫(音效卡驅動之asoc移植)
【 宣告:版權所有,歡迎轉載,請勿用於商業用途。 聯絡信箱:feixiaoxing @163.com】 Linux下面的音效卡驅動很複雜,根本不是一篇部落格能夠說清楚的。所以,本片文章的目的就是讓
Linux:驅動之字元裝置工作原理(未完)
字元裝置驅動工作原理 系統整體工作原理 應用層->API->裝置驅動->硬體? API:open、read、write、close等? 驅動原始碼中提供真正的open、read、write、close等函式實體? file_
Linux:驅動之為應用程式實現呼叫(未完)
應用程式如何呼叫驅動 目前尚不是最終版本,還望有心人自己學習的時候,把自己整合的知識點相關的答案也好問題也好,或者實踐過程中的一些操作截圖,再或者其他的一些想要分享材料發給筆者郵箱:[email protected],我們一起完善這篇部落格!筆者寫這篇部落格
Linux:驅動之字元設備註冊新介面(未完)
驅動之字元設備註冊新介面 目前尚不是最終版本,還望有心人自己學習的時候,把自己整合的知識點相關的答案也好問題也好,或者實踐過程中的一些操作截圖,再或者其他的一些想要分享材料發給筆者郵箱:[email protected],我們一起完善這篇部落格!筆者寫這篇部
Linux音訊驅動-PCM裝置
概述 1. 什麼是pcm? pcm(Pulse-code modulation)脈衝編碼調製,是將模擬訊號轉化為數字訊號的一種方法。聲音的轉化的過程為,先對連續的模擬訊號按照固定頻率週期性取樣,將取樣到的資料按照一定的精度
Linux裝置驅動之字元裝置驅動---轉
一、linux系統將裝置分為3類:字元裝置、塊裝置、網路裝置。 應用程式呼叫的流程框圖: 三種裝置的定義分別如下, 字元裝置:只能一個位元組一個位元組的讀寫的裝置,不能隨機讀取裝置記憶體中的某一資料,讀取資料需要按照先後順序進行。字元裝置是面向流的裝置,常見的字
linux I2C 驅動之----i2c驅動的註冊過程(i2c_register_driver->driver_register(&driver->driver)->driver_find)
Linux下i2c驅動的載入過程,分為i2c裝置層、i2c adapter層與i2c核心層 i2c裝置驅動層也就是我們為特定i2c裝置編寫的驅動,下面是我自己理解的i2c驅動的註冊過程 在我們寫的i2c裝置驅動中,我們會呼叫i2c_add_driver()開始i2c裝
Linux裝置驅動之workqueue----中斷底半部機制
文章為本人學習筆記和總結,如有錯誤,請多多指教; 引言: linux實現中斷底半部的機制主要有tasklet、工作佇列、軟中斷和執行緒化; 本文主要介紹下工作佇列---workqueue 1、工作佇列(workqueue)簡介 Linux中的Workqueue機制就
Linux裝置驅動之3.4.2核心下的I2C驅動
框架 1.1 硬體協議簡介 1.2 驅動框架 1.3 bus-drv-dev模型及寫程式 a. 裝置的4種構建方法 詳情參照:linux-3.4.2\Documentation\i2c:instantiating-devices: 以下摘取部分
嵌入式Linux音訊驅動開發
1.嵌入式音訊系統硬體連線 下圖所示的嵌入式裝置使用IIS將音訊資料傳送給編解碼器。對編解碼器的I/O暫存器的程式設計通過IIC匯流排進行。 2.音訊體系結構-ALSA ALSA是Advanced Linux Sound Architecture 的縮寫,目前已經成為了li