
驅動學習回顧——platform匯流排驅動-結合LED例項分析
前一篇文章總結了Linux下的bus裝置模型,實際上,我們在程式設計過程中,並不需要自己來建立匯流排,Linux已經為我們實現了諸如platform匯流排、USB匯流排、I2C匯流排等等。
而接下來要學習總結的platform匯流排有點“特別”,與USB、I2C、SPI等物理匯流排不同,它是一條虛擬匯流排。像USB裝置、I2C裝置都會有自己對應型別的匯流排進行掛載,從而與CPU通訊。但是在嵌入式系統中,並不是所有的裝置都能歸屬於這些常見的匯流排,所以Linux為了保證裝置驅動的統一和完整,“虛擬”出了這麼一條匯流排。
platform只是Linux匯流排模型下的一個子類。
下面以以前做過的在platform上實現的LED驅動程式來進行總結。
和之前一樣先從__init
一、
static int __init s3c_led_init(void)
{
int ret = 0;
ret = platform_device_register(&s3c_led_device);
if(ret)
{
printk(KERN_ERR "%s:%d: Can't register platform device %d\n", __FUNCTION__,__LINE__, ret);
goto fail_reg_plat_dev;
}
dbg_print("Regist S3C LED Platform Device successfully.\n" 1、可以看到在這個s3c_led_init 函式中s3c_led_device 是通過platform_device_register 進行了裝置的註冊。
//drivers/base/platform.c
int platform_device_register(struct platform_device *pdev)
{
device_initialize(&pdev->dev);
return platform_device_add(pdev);
}
EXPORT_SYMBOL_GPL(platform_device_register);platform_device_register 進而呼叫platform_device_add
,在這個函式裡會將父裝置設定為 platform_bus(即:/sys/devices/platform),然後設定將裝置掛在platform 匯流排下(即:platform_bus_type),接著對平臺裝置資源做處理,最後將平臺裝置新增入系統中(即:/sys/devices/platform/xxx)。
2、s3c_led_init 中接著進行驅動的註冊platform_driver_register。同樣看到這個函式:
//drivers/base/platform.c
/**
* platform_driver_register - register a driver for platform-level devices
* @drv: platform driver structure
*/
int platform_driver_register(struct platform_driver *drv)
{
drv->driver.bus = &platform_bus_type; //裝置驅動掛在platform下
/*對 drv 中的函式指標進行填充*/
if (drv->probe)
drv->driver.probe = platform_drv_probe;
if (drv->remove)
drv->driver.remove = platform_drv_remove;
if (drv->shutdown)
drv->driver.shutdown = platform_drv_shutdown;
return driver_register(&drv->driver); //註冊裝置驅動
}
EXPORT_SYMBOL_GPL(platform_driver_register);二、
接下來進入s3c_led_device 看看:
static struct platform_device s3c_led_device = {
.name = "s3c_led",
.id = 1,
.dev =
{
.platform_data = &s3c_led_data,
.release = platform_led_release,
},
};裡面的name id 是為後面的match 驅動和裝置的匹配,platform_data 存放的是設個裝置(led)的資源。繼續進入s3c_led_data:
static struct s3c_led_platform_data s3c_led_data = {
.leds = s3c_leds,
.nleds = ARRAY_SIZE(s3c_leds),
};進入s3c_leds:
static struct s3c_led_info s3c_leds[] = {
[0] = {
.num = 1,
.gpio = S3C2410_GPB(5),
.active_level = LOWLEVEL,
.status = OFF,
.blink = ENABLE,
},
[1] = {
.num = 2,
.gpio = S3C2410_GPB(6),
.active_level = LOWLEVEL,
.status = OFF,
.blink = DISABLE,
},
[2] = {
.num = 3,
.gpio = S3C2410_GPB(8),
.active_level = LOWLEVEL,
.status = OFF,
.blink = DISABLE,
},
[3] = {
.num = 4,
.gpio = S3C2410_GPB(10),
.active_level = LOWLEVEL,
.status = OFF,
.blink = DISABLE,
},
};這是一個結構體型別的陣列s3c_leds[] ,裡面的成員就儲存的是每一個裝置的物理屬性。
三、
再來看驅動是怎麼運作的,s3c_led_driver:
static struct platform_driver s3c_led_driver = {
.probe = s3c_led_probe,
.remove = s3c_led_remove,
.driver = {
.name = "s3c_led",
.owner = THIS_MODULE,
},
};看到了熟悉的身影: probe ,前一篇博文講到,probe 在驅動匹配完成後執行,用以驅動的初始化。remove 也提到了,是用作驅動和裝置分離、釋放的。只要驅動或裝置有一方離開了匯流排,就會執行這個函式。
probe:(分成幾個來看)
static int s3c_led_probe(struct platform_device *dev)
{
struct s3c_led_platform_data *pdata = dev->dev.platform_data;
int result = 0;
int i;
dev_t devno;下面是LED的初始化,nleds 前面有,是一共4個led燈。全部熄滅作為初始狀態。
/* Initialize the LED status */
for(i=0; i<pdata->nleds; i++)
{
s3c2410_gpio_cfgpin(pdata->leds[i].gpio, S3C2410_GPIO_OUTPUT);
if(ON == pdata->leds[i].status)
{
s3c2410_gpio_setpin(pdata->leds[i].gpio, pdata->leds[i].active_level);
}
else
{
s3c2410_gpio_setpin(pdata->leds[i].gpio, ~pdata->leds[i].active_level);
}
}下面的程式碼部分就很熟悉了,跟普通字元裝置的流程相似。1.分配主、次裝置號(手動分配 or 自動分配);2.cdev_init 建立字元裝置結構體變數,並與led_fops (file operation)關聯起來,cdev_add 將該裝置新增進核心
/* Alloc the device for driver */
if (0 != dev_major)
{
devno = MKDEV(dev_major, dev_minor);
result = register_chrdev_region(devno, 1, DEV_NAME);
}
else
{
result = alloc_chrdev_region(&devno, dev_minor, 1, DEV_NAME);
dev_major = MAJOR(devno);
}
/* Alloc for device major failure */
if (result < 0)
{
printk("%s driver can't get major %d\n", DEV_NAME, dev_major);
return result;
}
/* Initialize led structure and register cdev*/
memset(&led_device, 0, sizeof(led_device));
led_device.data = dev->dev.platform_data;
cdev_init (&(led_device.cdev), &led_fops);
led_device.cdev.owner = THIS_MODULE;
result = cdev_add (&(led_device.cdev), devno , 1);
if (result)
{
printk (KERN_NOTICE "error %d add %s device", result, DEV_NAME);
goto ERROR;
} 下面這段程式碼是自動建立裝置節點,省掉了手動mknode 的過程。
led_device.dev_class = class_create(THIS_MODULE, DEV_NAME);
if(IS_ERR(led_device.dev_class))
{
printk("%s driver create class failture\n",DEV_NAME);
result = -ENOMEM;
goto ERROR;
}
#if LINUX_VERSION_CODE >= KERNEL_VERSION(2,6,24)
device_create(led_device.dev_class, NULL, devno, NULL, DEV_NAME);
#else
device_create (led_device.dev_class, NULL, devno, DEV_NAME);
#endif下面一段是跟定時器有關,等下再看led_timer_handler 做了什麼。
/* Initial the LED blink timer */
init_timer(&(led_device.blink_timer));
led_device.blink_timer.function = led_timer_handler;
led_device.blink_timer.data = (unsigned long)pdata;
led_device.blink_timer.expires = jiffies + TIMER_TIMEOUT;
add_timer(&(led_device.blink_timer)); 下面就是列印資訊、出錯處理了。
printk("S3C %s driver version %d.%d.%d initiliazed.\n", DEV_NAME, DRV_MAJOR_VER, DRV_MINOR_VER, DRV_REVER_VER);
return 0;
ERROR:
printk("S3C %s driver version %d.%d.%d install failure.\n", DEV_NAME, DRV_MAJOR_VER, DRV_MINOR_VER, DRV_REVER_VER);
cdev_del(&(led_device.cdev));
unregister_chrdev_region(devno, 1);
return result;
}下面是有關定時器的函式:
void led_timer_handler(unsigned long data)
{
int i;
struct s3c_led_platform_data *pdata = (struct s3c_led_platform_data *)data;
for(i=0; i<pdata->nleds; i++)
{
if(ON == pdata->leds[i].status)
{
s3c2410_gpio_setpin(pdata->leds[i].gpio, pdata->leds[i].active_level);
}
else
{
s3c2410_gpio_setpin(pdata->leds[i].gpio, ~pdata->leds[i].active_level);
}
if(ENABLE == pdata->leds[i].blink ) /* LED should blink */
{
/* Switch status between 0 and 1 to turn LED ON or off */
pdata->leds[i].status = pdata->leds[i].status ^ 0x01;
}
mod_timer(&(led_device.blink_timer), jiffies + TIMER_TIMEOUT);
}
}這段程式碼作用就是:定時讀取每一個LED的引腳狀態到active_level 裡,若裝置有開啟blink 則在每個迴圈內反轉一次狀態。
請留意這裡有一個mod_timer ,mod_timer()會重新註冊定時器到核心,而不管定時器函式是否被執行過。
注意!一個重要的知識點:jiffies。 關於jiffies考慮單獨做一個總結,這個機制很有參考意義,比如可以借鑑到微控制器的開發上。這裡先留一個引子。
remove:
static int s3c_led_remove(struct platform_device *dev)
{
dev_t devno = MKDEV(dev_major, dev_minor);
del_timer(&(led_device.blink_timer));
cdev_del(&(led_device.cdev));
device_destroy(led_device.dev_class, devno);
class_destroy(led_device.dev_class);
unregister_chrdev_region(devno, 1);
printk("S3C %s driver removed\n", DEV_NAME);
return 0;
}這也是有一套流程的:回收主裝置號;登出字元裝置變數;這裡新增了清除定時器和銷燬dev_class 。
四、
登出平臺裝置:
static void s3c_led_exit(void)
{
dbg_print("%s():%d remove LED platform drvier\n", __FUNCTION__,__LINE__);
platform_driver_unregister(&s3c_led_driver);
dbg_print("%s():%d remove LED platform device\n", __FUNCTION__,__LINE__);
platform_device_unregister(&s3c_led_device);
}很簡單,platform_driver_unregister 登出驅動,platform_device_unregister 登出裝置。
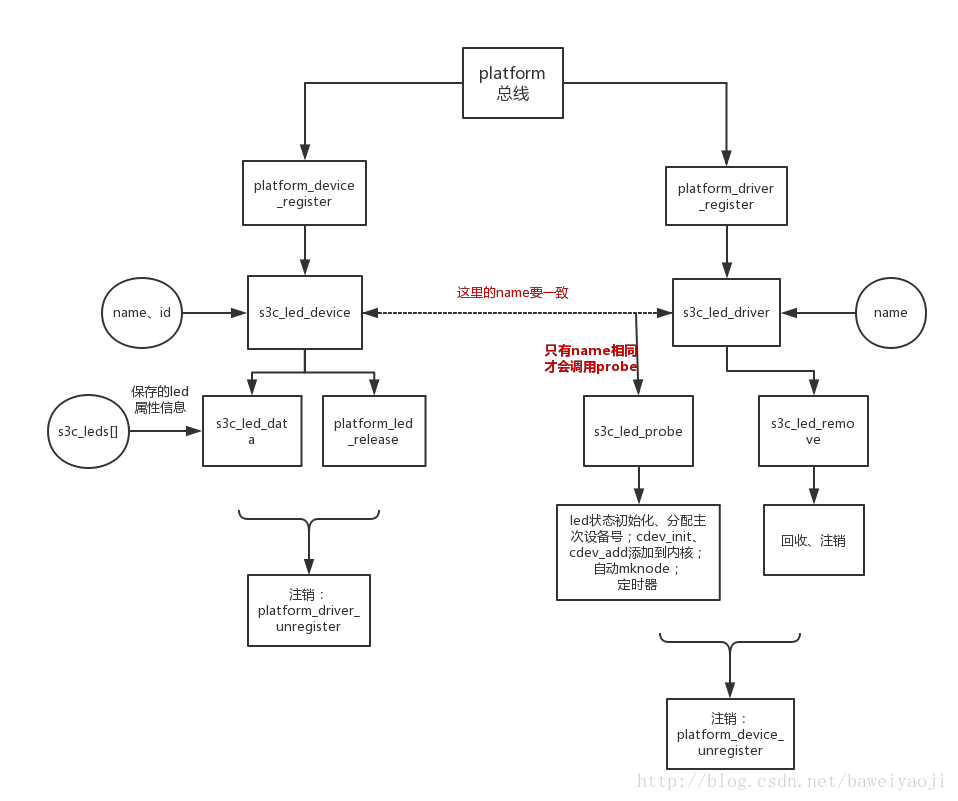
整個led例項的過程以圖示說明:(比較簡陋,僅供參考。。)
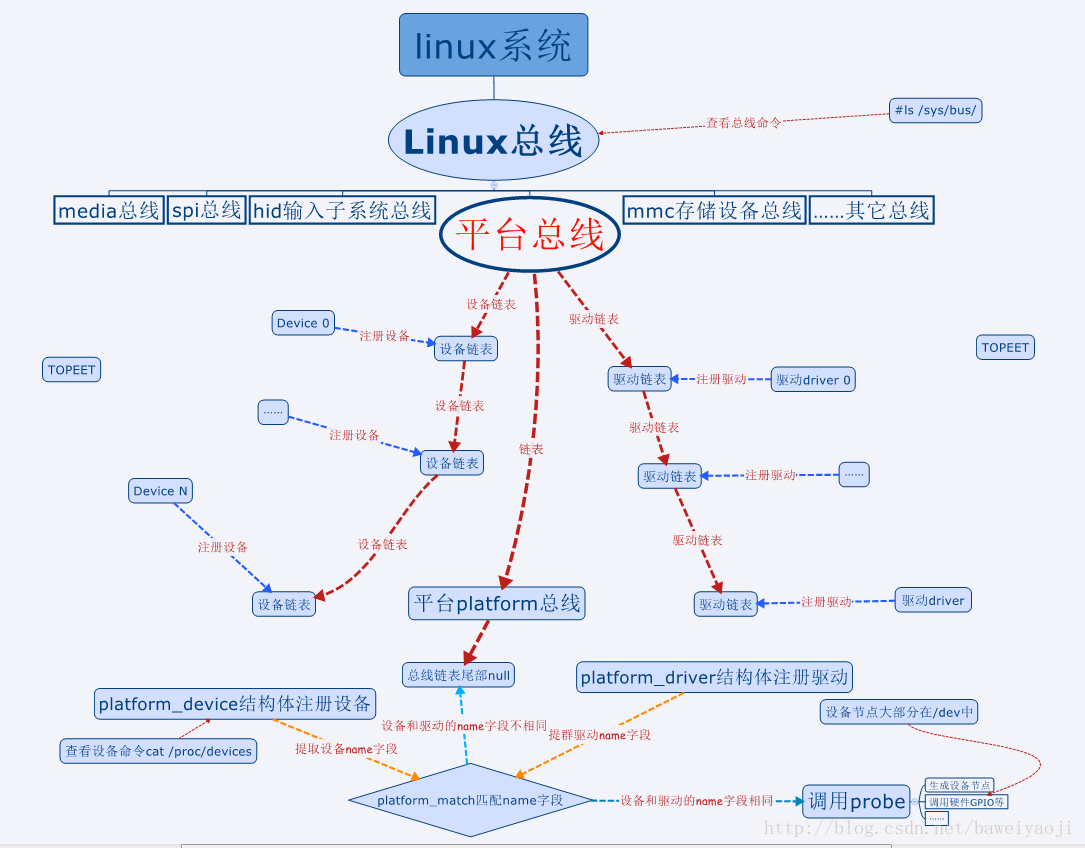
關於platform在核心中是如何一步步新增到bus上的就不深究了。從網上摘錄一個圖:
最後給出完整程式碼:
#include "s3c_driver.h"
#define DRV_AUTHOR "Tangbin"
#define DRV_DESC "S3C24XX LED driver"
/* Driver version*/
#define DRV_MAJOR_VER 1
#define DRV_MINOR_VER 0
#define DRV_REVER_VER 0
#define DEV_NAME DEV_LED_NAME
//#define DEV_MAJOR DEV_LED_MAJOR
#ifndef DEV_MAJOR
#define DEV_MAJOR 0 /* dynamic major by default */
#endif
#define TIMER_TIMEOUT 40
static int debug = DISABLE;
static int dev_major = DEV_MAJOR;
static int dev_minor = 0;
/* ============================ Platform Device part ===============================*/
/* LED hardware informtation structure*/
struct s3c_led_info
{
unsigned char num; /* The LED number */
unsigned int gpio; /* Which GPIO the LED used */
unsigned char active_level; /* The GPIO pin level(HIGHLEVEL or LOWLEVEL) to turn on or off */
unsigned char status; /* Current LED status: OFF/ON */
unsigned char blink; /* Blink or not */
};
/* The LED platform device private data structure */
struct s3c_led_platform_data
{
struct s3c_led_info *leds;
int nleds;
};
/* LED hardware informtation data*/
static struct s3c_led_info s3c_leds[] = {
[0] = {
.num = 1,
.gpio = S3C2410_GPB(5),
.active_level = LOWLEVEL,
.status = OFF,
.blink = ENABLE,
},
[1] = {
.num = 2,
.gpio = S3C2410_GPB(6),
.active_level = LOWLEVEL,
.status = OFF,
.blink = DISABLE,
},
[2] = {
.num = 3,
.gpio = S3C2410_GPB(8),
.active_level = LOWLEVEL,
.status = OFF,
.blink = DISABLE,
},
[3] = {
.num = 4,
.gpio = S3C2410_GPB(10),
.active_level = LOWLEVEL,
.status = OFF,
.blink = DISABLE,
},
};
/* The LED platform device private data */
static struct s3c_led_platform_data s3c_led_data = {
.leds = s3c_leds,
.nleds = ARRAY_SIZE(s3c_leds),
};
struct led_device
{
struct s3c_led_platform_data *data;
struct cdev cdev;
struct class *dev_class;
struct timer_list blink_timer;
} led_device;
static void platform_led_release(struct device * dev)
{
int i;
struct s3c_led_platform_data *pdata = dev->platform_data;
dbg_print("%s():%d\n", __FUNCTION__,__LINE__);
/* Turn all LED off */
for(i=0; i<pdata->nleds; i++)
{
s3c2410_gpio_setpin(pdata->leds[i].gpio, ~pdata->leds[i].active_level);
}
}
static struct platform_device s3c_led_device = {
.name = "s3c_led",
.id = 1,
.dev =
{
.platform_data = &s3c_led_data,
.release = platform_led_release,
},
};
/* ===================== led device driver part ===========================*/
void led_timer_handler(unsigned long data)
{
int i;
struct s3c_led_platform_data *pdata = (struct s3c_led_platform_data *)data;
for(i=0; i<pdata->nleds; i++)
{
if(ON == pdata->leds[i].status)
{
s3c2410_gpio_setpin(pdata->leds[i].gpio, pdata->leds[i].active_level);
}
else
{
s3c2410_gpio_setpin(pdata->leds[i].gpio, ~pdata->leds[i].active_level);
}
if(ENABLE == pdata->leds[i].blink ) /* LED should blink */
{
/* Switch status between 0 and 1 to turn LED ON or off */
pdata->leds[i].status = pdata->leds[i].status ^ 0x01;
}
mod_timer(&(led_device.blink_timer), jiffies + TIMER_TIMEOUT);
}
}
static int led_open(struct inode *inode, struct file *file)
{
struct led_device *pdev ;
struct s3c_led_platform_data *pdata;
pdev = container_of(inode->i_cdev,struct led_device, cdev);
pdata = pdev->data;
file->private_data = pdata;
return 0;
}
static int led_release(struct inode *inode, struct file *file)
{
return 0;
}
static void print_led_help(void)
{
printk("Follow is the ioctl() command for LED driver:\n");
printk("Enable Driver debug command: %u\n", SET_DRV_DEBUG);
printk("Get Driver verion command : %u\n", GET_DRV_VER);
printk("Turn LED on command : %u\n", LED_ON);
printk("Turn LED off command : %u\n", LED_OFF);
printk("Turn LED blink command : %u\n", LED_BLINK);
}
/* compatible with kernel version >=2.6.38*/
static long led_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
struct s3c_led_platform_data *pdata = file->private_data;
switch (cmd)
{
case SET_DRV_DEBUG:
dbg_print("%s driver debug now.\n", DISABLE == arg ? "Disable" : "Enable");
debug = (0==arg) ? DISABLE : ENABLE;
break;
case GET_DRV_VER:
print_version(DRV_VERSION);
return DRV_VERSION;
case LED_OFF:
if(pdata->nleds <= arg)
{
printk("LED%ld doesn't exist\n", arg);
return -ENOTTY;
}
pdata->leds[arg].status = OFF;
pdata->leds[arg].blink = DISABLE;
break;
case LED_ON:
if(pdata->nleds <= arg)
{
printk("LED%ld doesn't exist\n", arg);
return -ENOTTY;
}
pdata->leds[arg].status = ON;
pdata->leds[arg].blink = DISABLE;
break;
case LED_BLINK:
if(pdata->nleds <= arg)
{
printk("LED%ld doesn't exist\n", arg);
return -ENOTTY;
}
pdata->leds[arg].blink = ENABLE;
pdata->leds[arg].status = ON;
break;
default:
dbg_print("%s driver don't support ioctl command=%d\n", DEV_NAME, cmd);
print_led_help();
return -EINVAL;
}
return 0;
}
static struct file_operations led_fops = {
.owner = THIS_MODULE,
.open = led_open,
.release = led_release,
.unlocked_ioctl = led_ioctl, /* compatible with kernel version >=2.6.38*/
};
static int s3c_led_probe(struct platform_device *dev)
{
struct s3c_led_platform_data *pdata = dev->dev.platform_data;
int result = 0;
int i;
dev_t devno;
/* Initialize the LED status */
for(i=0; i<pdata->nleds; i++)
{
s3c2410_gpio_cfgpin(pdata->leds[i].gpio, S3C2410_GPIO_OUTPUT);
if(ON == pdata->leds[i].status)
{
s3c2410_gpio_setpin(pdata->leds[i].gpio, pdata->leds[i].active_level);
}
else
{
s3c2410_gpio_setpin(pdata->leds[i].gpio, ~pdata->leds[i].active_level);
}
}
/* Alloc the device for driver */
if (0 != dev_major)
{
devno = MKDEV(dev_major, dev_minor);
result = register_chrdev_region(devno, 1, DEV_NAME);
}
else
{
result = alloc_chrdev_region(&devno, dev_minor, 1, DEV_NAME);
dev_major = MAJOR(devno);
}
/* Alloc for device major failure */
if (result < 0)
{
printk("%s driver can't get major %d\n", DEV_NAME, dev_major);
return result;
}
/* Initialize button structure and register cdev*/
memset(&led_device, 0, sizeof(led_device));
led_device.data = dev->dev.platform_data;
cdev_init (&(led_device.cdev), &led_fops);
led_device.cdev.owner = THIS_MODULE;
result = cdev_add (&(led_device.cdev), devno , 1);
if (result)
{
printk (KERN_NOTICE "error %d add %s device", result, DEV_NAME);
goto ERROR;
}
led_device.dev_class = class_create(THIS_MODULE, DEV_NAME);
if(IS_ERR(led_device.dev_class))
{
printk("%s driver create class failture\n",DEV_NAME);
result = -ENOMEM;
goto ERROR;
}
#if LINUX_VERSION_CODE >= KERNEL_VERSION(2,6,24)
device_create(led_device.dev_class, NULL, devno, NULL, DEV_NAME);
#else
device_create (led_device.dev_class, NULL, devno, DEV_NAME);
#endif
/* Initial the LED blink timer */
init_timer(&(led_device.blink_timer));
led_device.blink_timer.function = led_timer_handler;
led_device.blink_timer.data = (unsigned long)pdata;
led_device.blink_timer.expires = jiffies + TIMER_TIMEOUT;
add_timer(&(led_device.blink_timer));
printk("S3C %s driver version %d.%d.%d initiliazed.\n", DEV_NAME, DRV_MAJOR_VER, DRV_MINOR_VER, DRV_REVER_VER);
return 0;
ERROR:
printk("S3C %s driver version %d.%d.%d install failure.\n", DEV_NAME, DRV_MAJOR_VER, DRV_MINOR_VER, DRV_REVER_VER);
cdev_del(&(led_device.cdev));
unregister_chrdev_region(devno, 1);
return result;
}
static int s3c_led_remove(struct platform_device *dev)
{
dev_t devno = MKDEV(dev_major, dev_minor);
del_timer(&(led_device.blink_timer));
cdev_del(&(led_device.cdev));
device_destroy(led_device.dev_class, devno);
class_destroy(led_device.dev_class);
unregister_chrdev_region(devno, 1);
printk("S3C %s driver removed\n", DEV_NAME);
return 0;
}
static struct platform_driver s3c_led_driver = {
.probe = s3c_led_probe,
.remove = s3c_led_remove,
.driver = {
.name = "s3c_led",
.owner = THIS_MODULE,
},
};
static int __init s3c_led_init(void)
{
int ret = 0;
ret = platform_device_register(&s3c_led_device);
if(ret)
{
printk(KERN_ERR "%s:%d: Can't register platform device %d\n", __FUNCTION__,__LINE__, ret);
goto fail_reg_plat_dev;
}
dbg_print("Regist S3C LED Platform Device successfully.\n");
ret = platform_driver_register(&s3c_led_driver);
if(ret)
{
printk(KERN_ERR "%s:%d: Can't register platform driver %d\n", __FUNCTION__,__LINE__, ret);
goto fail_reg_plat_drv;
}
dbg_print("Regist S3C LED Platform Driver successfully.\n");
return 0;
fail_reg_plat_drv:
platform_driver_unregister(&s3c_led_driver);
fail_reg_plat_dev:
return ret;
}
static void s3c_led_exit(void)
{
dbg_print("%s():%d remove LED platform drvier\n", __FUNCTION__,__LINE__);
platform_driver_unregister(&s3c_led_driver);
dbg_print("%s():%d remove LED platform device\n", __FUNCTION__,__LINE__);
platform_device_unregister(&s3c_led_device);
}
module_init(s3c_led_init);
module_exit(s3c_led_exit);
module_param(debug, int, S_IRUGO);
module_param(dev_major, int, S_IRUGO);
module_param(dev_minor, int, S_IRUGO);
MODULE_AUTHOR(DRV_AUTHOR);
MODULE_DESCRIPTION(DRV_DESC);
MODULE_LICENSE("GPL");
MODULE_ALIAS("platform:S3C24XX_led");相關推薦
驅動學習回顧——platform匯流排驅動-結合LED例項分析
前一篇文章總結了Linux下的bus裝置模型,實際上,我們在程式設計過程中,並不需要自己來建立匯流排,Linux已經為我們實現了諸如platform匯流排、USB匯流排、I2C匯流排等等。 而接下來要學習總結的platform匯流排有點“特別”,與USB、I2
驅動學習回顧——按鍵(Button)驅動的理解和總結
當時在學習按鍵驅動時,便覺得其中有幾個點是比較難理解的,在整體上自己感到並沒有很好地掌握。現在經過了一段時間地學習,再將按鍵驅動裡的疑難點加以理解之後,總結記錄一下。 關於驅動程式碼之前已經給出,點選:這裡,但只是關於程式碼語句的註釋,下面將從功能塊上著重分析
Linux下的platform匯流排驅動
一.Platform裝置驅動概念 主要講解平臺裝置驅動的模型和基本概念,同時因為驅動載入的方式有動態載入和靜態載入兩種方式,這裡我們分別對動態載入和靜態載入兩種情況下,如何使用平臺裝置和驅動加以敘述。最後使用mini2440開發板,運用Platform和device_att
Linux裝置驅動模型之platform匯流排深入淺出(加入裝置樹)
在Linux2.6以後的裝置驅動模型中,需關心匯流排,裝置和驅動這三種實體,匯流排將裝置和驅動繫結。在系統每註冊一個裝置的時候,會尋找與之匹配的驅動;相反,在系統每註冊一個驅動的時候,會尋找與之匹配的裝置,而匹配由匯流排完成。 對於依附在USB、PCI、I2C
Linux驅動中的platform匯流排分析
最近在複習platform匯流排相關的知識,碰到一篇感覺不錯的文章。 概述 從Linux2.6核心起,引入一套新的驅動管理和註冊機制:platform_device 和 platform_driver 。Linux 中大部分的裝置驅動,都可以使用這套機制
linux裝置驅動學習(6) 高階字元驅動學習--阻塞型I/0
提出問題:若驅動程式無法立即滿足請求,該如何響應? 比如:當資料不可用時呼叫read,或是在緩衝區已滿時,呼叫write 解決問題:驅動程式應該(預設)該阻塞程序,將其置入休眠狀態直到請求可繼續。 休眠: 當一個程序被置入休眠時,它會被標記為一種特殊狀態並從排程器執行佇列
linux驅動學習4:scull驅動
要點:學習ioctl()驅動編寫,如何傳入命令來控制硬體。 1)ioctl知識 使用者空間的ioctl()呼叫如下: int ioctl(int fd, unsigned long cmd, …); 2)驅動中ioctl: Int (*ioctl) (struct
linux驅動由淺入深系列:高通sensor架構例項分析之一
本系列導航: 最初的時候晶片廠家對sensor的處理和對待其它外設一樣都是直接掛在processor上,sensor的驅動也和其他linux或android的驅動一樣,生成對應的裝置節點給上層提供資料(關於此類linux基礎驅動的知識,可以參考本部落格其他博文)
【UML學習】--繪製圖的要點和例項分析
先百度一下,Unified Modeling Language (UML)又稱統一建模語言或標準建模語言,是始於1997年一個OMG標準,它是一個支援模型化和軟體系統開發的圖形化語言,為軟體開發的所有階段提供模型化和視覺化支援,包括由需求分析到規格,到構造和配置。
springboot結合Rabbitmq例項分析
一.前言 本文介紹springboot整合Rabbitmq的具體使用.rabbitmq採用centos的安裝方式,具體詳細安裝方法可參考前面的文章:https://blog.csdn.net/u010520146/article/details/84454004 二.相關概念 訊
Hadoop學習筆記之初識MapReduce以及WordCount例項分析
MapReduce簡介 MapReduce是什麼? MapReduce是一種程式設計模型,用於大規模資料集的分散式運算。 Mapreduce基本原理 1、MapReduce通俗解釋 圖書館要清點圖書數量,有10個書架,管理員為了加快統計速度,找來了
十一、Linux驅動之platform匯流排裝置驅動
1. 基本概念 從Linux2.6開始Linux加入了一套驅動管理和註冊機制—platform平臺匯流排驅動模型。platform平臺匯流排是一條虛擬匯流排,platform_device為相應的裝置,platform_driver為相應的驅動。與傳統的bu
【迅為iTop4412學習筆記】14.編寫一個LED驅動
宣告 以下都是我剛開始看驅動視訊的個人強行解讀,如果有誤請指出,共同進步。 本節目標 編寫一個LED驅動 本節我們就真正的來驅動一個板子上的LED(微控制器第一節就是點燈,沒想到Linux要學這麼久…) 我們首先理清思路。 註冊裝
linux驅動之platform匯流排
第一部分:裝置驅動模型1、匯流排:bus_type結構體,關鍵函式是match函式和uevent函式;匯流排將裝置和驅動繫結,在系統每註冊一個裝置的時候,會尋找與之匹配的驅動,相反,在系統每註冊一個驅動的時候,會尋找與之匹配的裝置,而匹配由匯流排完成。 2、裝置:struct device結構體,硬體裝置在
基於platform匯流排的驅動分析
1.platform匯流排基本概念裝置和驅動若基於裝置驅動模型,則它們通常都需要掛接在一種總線上。匯流排相對於裝置和驅動,可謂是“媒人”擔當對於本身依附於 USB、 I2C、SPI 等的裝置而言,這自然不是問題。但是很多的裝置(比如led)實際並不依附於匯流排,沒了“媒人”,
Ti437x LED匯流排驅動模型程式+裝置樹
本文主要記錄AM437X驅動的LED。含簡單的字元裝置驅動、裝置驅動模型、裝置樹以及LED子系統。 目前就Linux驅動的理解是: Linux驅動 = 裸機 + 框架 關於框架,目前的理解是: 以LED驅動為例,之前印象中就是韋老大
s5pv210開發板 led驅動學習筆記
相應驅動程式如下:#include <linux/module.h> #include <linux/init.h> #include <linux/fs.h> #include <linux/types.h> #include <linu
Linux裝置驅動模型之platform(平臺)匯流排詳解
1 int driver_attach(struct device_driver *drv) 2 { 3 return bus_for_each_dev(drv->bus, NULL, drv, __driver_attach); // 這個函式的功能就是: 依次去匹配b
樹莓派linux驅動學習之LED控制
#include <linux/miscdevice.h> #include <linux/delay.h> #include <asm/irq.h> #include <linux/kernel.h> #include <linux/module.h&g
Linux裝置驅動模型3——platform平臺匯流排工作原理
以下內容源於朱有鵬嵌入式課程的學習,如有侵權,請告知刪除。 四、platform平臺匯流排工作原理1 1、何為平臺匯流排? (1)屬於匯流排中的一種,相對於usb、pci、i2c等物理匯流排來說,platform匯流排是虛擬的、抽象出來的。 (2)CPU與外部通訊的2種方